

§10.Определение ускорений, скоростей и времени выполнения основных движений.
![]()
![]() - ускорение по отдельным координатам
- ускорение по отдельным координатам
Трапецеидальный закон с тем, чтобы разгон и торможение происходило с одинаковым ускорением.
Время разгона = время торможения.
![]()
При этом для равноускоренного прямолинейного движения и движения по дуге окружности радиусом R получим:
![]() (1)
(1)
![]() (1a)
(1a)
![]() - номинальная линейная и угловая скорости
- номинальная линейная и угловая скорости
![]() – линейное ускорение по соответствующей
координате
– линейное ускорение по соответствующей
координате
![]() - угловое ускорение
- угловое ускорение
r – Максимальный радиус обслуживания роботом
Из (1) имеем ![]()
![]()
![]()
![]() (3)
(3)
S – Полное перемещение за цикл
![]()
Продолжительность цикла для прямолинейного движения по отдельным координатам
![]() (4)
(4)
Аналогично получаем формулу для угловых
![]() (4a)и
(4a)и
Если период установки режима отсутствует, то трапецеидальный закон движения выраждается в треугольник

Если при этом перемещение S остается неизменным, то есть площадь треугольника = площадь трапеции, то скорость перемещения достигает максимального значения. Найдем эту скорость. Для этого запишем путь разгона при треугольном законе движения.
![]() (5)
(5)
![]() (6)
(6)
Приравниваем правые части (5) и (6)
![]() =>
=> ![]() (7)
(7)
Аналогично
![]() (7a)
(7a)
Порядок расчета:
По формулам (7) и (7а) определить максимальные возможные скорости при заданном линейном S или угловом φ перемещениях и выбранном ускорением . Выбранная скорость не должна превышать максимальную.
По формулам (1) и (1а) определить время разгона и торможения, а по формулам (4) и (4а) продолжительность цикла разгона и торможения.
§11. Выбор двигателя для робота.
Определение силы, необходимой для прямолинейного движения груза:
F=Fu+Fн+Fтр (8)
Fu- сила инерции, возникающая при разгоне и замедлении (торможении).
Fн- сила от веса груза и прямолинейно движущихся частей робота.
Fтр- сила трения.
Найдем Fu,Fн,Fтр
Fu=(m+mм)▪a
m- номинальная масса груза.
mм- суммарная масса прямолинейно движущихся частей робота.
Пусть:
 ,тогда
,тогда
![]()
![]()
где
![]() -угол
наклона направлением
прямолинейного движения к горизонтальной
плоскости.
-угол
наклона направлением
прямолинейного движения к горизонтальной
плоскости.
![]()
![]()
![]() -
Начальная сила трения.
-
Начальная сила трения.
![]() -
коэффициент трения качения (мм.)
-
коэффициент трения качения (мм.)
![]() -
нормальная сила.
-
нормальная сила.
![]() -диаметр
тела качения (мм.)
-диаметр
тела качения (мм.)
Рекомендуют для стальных шариковых и роликовых составляющих.
![]()
А для чугунных:
![]()
Сила трения в направляющих скольжения.
![]()
При
выборе двигателя рекомендуют
ориентироваться на наиболее
неблагоприятный случай, т.е. принимать
максимальное значение ![]() из диапазона, предлагаемого учебниками.
из диапазона, предлагаемого учебниками.
Полная сила трения:
![]()
2. Определение момента, необходимого для перемещения груза.
![]() (9)
(9)
![]() -момент
сил инерции, возникающий при разгоне и
замедлении.
-момент
сил инерции, возникающий при разгоне и
замедлении.
![]() -момент
от веса груза и вращающихся неуравновешенных
частей робота относительно осей вращения
робота при максимальном радиусе
обслуживания r.
-момент
от веса груза и вращающихся неуравновешенных
частей робота относительно осей вращения
робота при максимальном радиусе
обслуживания r.
![]() -момент
сил трения.
-момент
сил трения.
Найдём
![]() .
.
![]()
![]() - момент инерции массы m
груза при максимальном радиусе
обслуживания r
- момент инерции массы m
груза при максимальном радиусе
обслуживания r
![]() -радиус
обслуживания (максимальный).
-радиус
обслуживания (максимальный).
![]() -масса
груза.
-масса
груза.
![]() -суммарный
момент инерции масс вращающихся частей
робота при максимальном радиусе
обслуживания
.
-суммарный
момент инерции масс вращающихся частей
робота при максимальном радиусе
обслуживания
.
![]()
![]() -масса,
вращающейся части робота с номером i.
-масса,
вращающейся части робота с номером i.
![]() -расстояние
от центра тяжести вращающейся части с
номером i до оси вращения
робота при максимальном радиусе
обслуживания r.
-расстояние
от центра тяжести вращающейся части с
номером i до оси вращения
робота при максимальном радиусе
обслуживания r.
![]()
![]()
![]()
![]() -масса
вращающейся неуравновешенной части
робота с номером j
-масса
вращающейся неуравновешенной части
робота с номером j
![]() -расстояние
от центра тяжести неуравновешенной
части робота с номером j
до оси вращения робота при max
радиусе вращения r.
-расстояние
от центра тяжести неуравновешенной
части робота с номером j
до оси вращения робота при max
радиусе вращения r.
![]() -угол
наклона плоскости вращения к горизонтальной
плоскости.
-угол
наклона плоскости вращения к горизонтальной
плоскости.
 ,
тогда
,
тогда
![]()
Запишем момент трения в подшипнике с номером k.
![]()
![]() -сила,
действующая на подшипник с номером k.
-сила,
действующая на подшипник с номером k.
![]() -приведённый
коэффициент трения для подшипников
качения либо коэффициент трения
скольжения в зависимости от типа
подшипника.
-приведённый
коэффициент трения для подшипников
качения либо коэффициент трения
скольжения в зависимости от типа
подшипника.
![]() -внутренний
диаметр скольжения с номером k.
-внутренний
диаметр скольжения с номером k.
![]()
Выбор типа и размера двигателя.
Пневмо и гидроцилиндры.
Выбирают по силе Fштока на штоке цилиндра.
1)при прямолинейном движении груза
![]() (10)
(10)
2)при движении по окружности
![]() (10a)
(10a)
![]() и
и
![]() находятся
по формулам 8 и 9
находятся
по формулам 8 и 9
![]() -плечо,
на которое прикладывают силу
-плечо,
на которое прикладывают силу ![]()
![]() ,
,![]() -передаточное
отношение и КПД механизма между штоком
цилиндра и исполнительным механизмом
робота
-передаточное
отношение и КПД механизма между штоком
цилиндра и исполнительным механизмом
робота
![]() , при отсутствии передаточного механизма.
, при отсутствии передаточного механизма.
Найдем силу передаточного механизма.
Сила на штоке цилиндра:
a) При подаче давления со стороны поршня.
![]() (11)
(11)
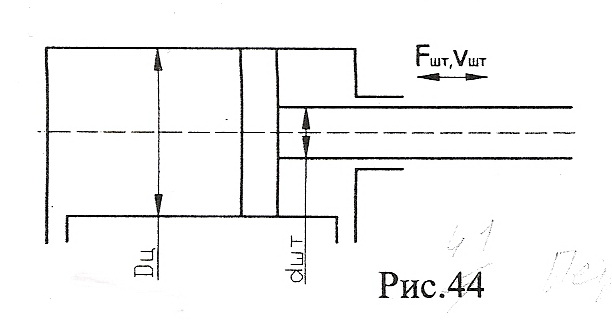
б) При подаче давления со стороны штока (рис. 25)
![]() (11a)
(11a)
![]() – давление рабочей среды (воздуха или
жидкости).
– давление рабочей среды (воздуха или
жидкости).
![]() -
механический КПД цилиндра, учитывает
потери на трение в уплотнениях поршня
и штока.
-
механический КПД цилиндра, учитывает
потери на трение в уплотнениях поршня
и штока.
Из формулы (11) и (11а) находим необходимое давление.
![]() (а)
(а)
![]() (б)
(б)
Зная скорость штока можем найти расход жидкости в гидроцилиндрах.
![]()
При подаче давления со стороны поршня
![]() (а)
(а)
При подаче давления со стороны штока
![]() (б)
(б)
Расход воздуха в пневмодвигателях не оцениваем, так как запас воздуха в пневмосети значительно выше, чем расход робота.
3.2. Поворотные лопастные пневмо- и
гидродвигатели подбираются по моменту
![]() на валу двигателя.
на валу двигателя.

При прямолинейном движении груза.
![]() (12)
(12)
При движении по окружности радиусом
![]() (12a)
(12a)
F и T находятся по формулам (8) и (9)
![]() -
радиус приведения.
-
радиус приведения.
и - передаточное отношение и КПД механизма между валом двигателя и исполнительным звеном робота
![]()
![]() -
скорость прямолинейного движения груза.
-
скорость прямолинейного движения груза.
![]() -
угловая скорость звена механизма,
преобразующего вращательное движение
в поступательное.
-
угловая скорость звена механизма,
преобразующего вращательное движение
в поступательное.
В большинстве случаев пневмо- и гидроприводы не имеют передаточный механизм, тогда формулы (12) и (12а) имеют следующий вид:
![]()
![]()
На лопасти действует сила:
![]() (13)
(13)
![]() (14)
(14)
![]() (15) – средний радиус лопасти
(15) – средний радиус лопасти
Подставим (13) и (15) в (14)
![]()
Отсюда находится необходимое давление
![]()
Зная ![]() вала находя расход жидкости гидродвигателя
вала находя расход жидкости гидродвигателя
![]() (16)
(16)
![]() (18)
(18)
![]()
3.3. Электродвигатель выбирают по
номинальной мощности ![]() .
.
Потребная мощность двигателя при прямолинейном движении.
![]() (кВт), где
(кВт), где
![]() -
скорость прямолинейного движения груза.
-
скорость прямолинейного движения груза.
- КПД механизма между валом электродвигателя и исполнительным звеном робота (рабочим органом)
Необходимая мощность двигателя при движении груза по дуге окружности с радиусом r.
![]()
где
![]() и
и![]() -
частота вращения и угловая скорость
груза при движении по дуге окружности
с радиусом
.
-
частота вращения и угловая скорость
груза при движении по дуге окружности
с радиусом
.
![]()