

§2. Актт с фотоэлектрической системой управления (фсу).
При ФСУ (рис47) тележка 1 движется вдоль уложенной по полу светлой, например металлизированной, ленты 2 или вдоль размеченной на полу белой полосы, отражающая способность которой выше, чем у пола. В нижней части тележки 1 расположен источник света 3 и ряд фотоэлементов 4. Падающий от источника 3 свет отражается, разделяется по яркости на 2 уровня, которые соответствуют сигналам: 1-от ленты или полосы, 0 – от пола.
При повороте ленты (вправо) освещается правая группа ФЭ и тележка поворачивает вправо. Если лента имеет более широкий участок, то освещается большее число ФЭ и формируется команда на остановку тележки. Если в СУ не поступает сигнал от ФЭ, значит, тележка сошла с ленты, то формируется команда на полный останов тележки.
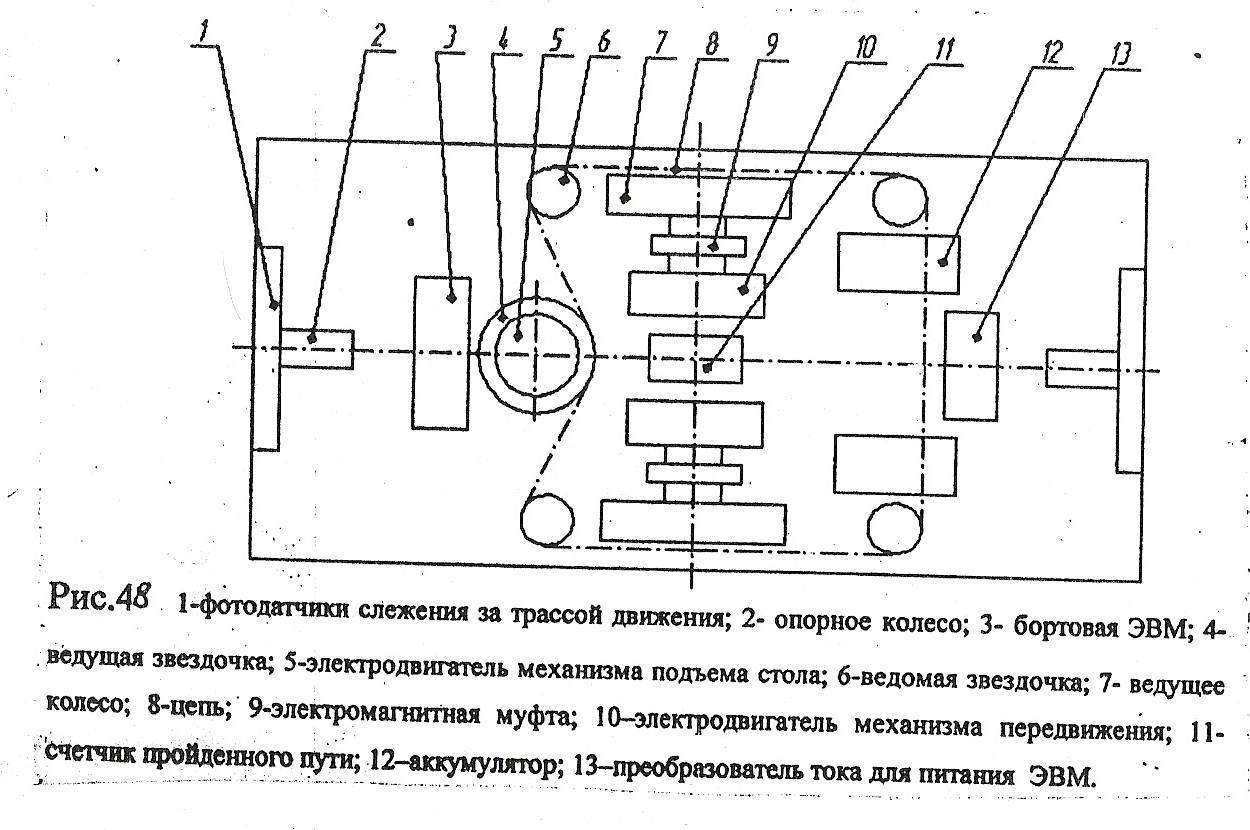
Существуют также оптические СУ по лучу лазера. На рис.48 – один из вариантов компоновки тележки с ФСУ и подъёмным столом.
Раздельный привод ведущих колёс позволяет тележке развернуться на месте вокруг вертикальной оси. Спереди и сзади тележка имеет подвижные бамперы, которые при наезде на препятствие включают систему торможения и останова.
§3. Актт с электромагнитной системой управления (эмсу).
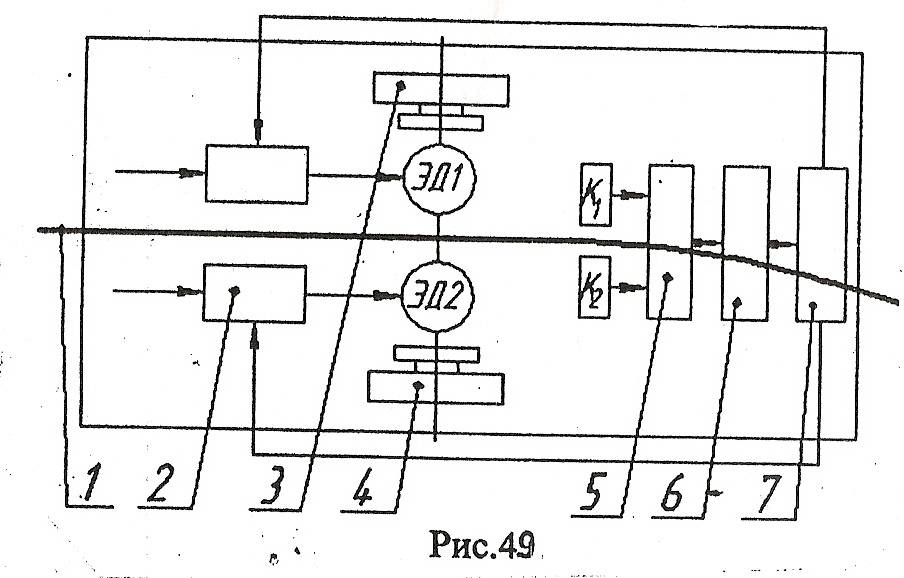
Рис. 49.
При ЭМСУ под поверхностью пола по трассе движения тележки уложен кабель 1, по которому подают переменный ток. Вокруг кабеля возникает переменное электромагнитное поле, которое воспринимает система слежения в виде катушек К1 и К2. Если трасса кабеля прямолинейна, то в катушках К1 и К2 индуцируются равные напряжения. В этом случае система управления через блоки управления 2 задаёт электродвигателям ЭД1 и ЭД2 одинаковые частоты вращения.. При повороте кабеля 1 (вправо) в правой катушке К2 напряжение становится больше, чем в К1. От катушки напряжение подают в дифференциальный усилитель 5,усилитель мощности 6 и в вычислительную систему 7. Вычислительная система обрабатывает поступающий сигнал таким образом, что подаётся команда в блок управления правым электродвигателем ЭД2 уменьшит частоту вращения правого ведущего колеса 4 пропорционально разности напряжений, индуцированных в катушках К1 и К2. При этом частота вращения левого электродвигателя ЭД1 и, следовательно, левого ведущего колеса 3 поддерживается на уровне, заданном программой управления. Для управления скоростью тележки, её остановки и изменения направления движения применяются кодовые плиты, установленные на полу. В кодовых плитах расположены постоянные магниты в определённой последовательности. При наезде на кодовую плиту приёмное устройство обнаруживает расположение и размеры магнитов. На основе полученной информации СУ тележки формирует соответствующие команды.
Часть 3.Промышленные роботы
§1. Основные понятия.
Общепринятого определения промышленного робота не существует, определение по ГОСТ25686-85.
Манипулятор – управляющее устройство или машина для выполнения двигательных функций, аналогичных функциям руки человека при перемещении объекта в пространстве, оснащенная рабочим органом.
Автооператор – автоматическая машина, состоящая из исполнительного устройства в виде манипулятора или совокупности манипулятора и устройства передвижения и не перепрограммируемого устройства управления.
Промышленный робот (ПР) – автоматическая машина, стационарная или передвижная, состоящая из исполнительного устройства в виде манипулятора, имеющего несколько степеней подвижности и перепрограммируемого устройства программного управления для выполнения двигательных и управляющих функций.
Роботы позволяют:
1) ликвидировать дефицит рабочей силы
2) повысить производительность за счёт ритмичности работы, увеличения сменности и уменьшения брака
улучшить условия труда, снизить травматизм и профессиональные заболевания
4) повысить качество продукции за счет исключения субъективного фактора
5) автоматизировать серийное и мелкосерийное производство