§6.Передаточные механизма мср.
Зависят от типа двигателя и скорости перемещения его выходного звена (штока цилиндра или вала двигателя), а также вида и скорости передвижения исполнительного звена ПР.
Рассмотрим:
Зубчатые цилиндрические передачи
Достоинства:
- высокий КПД
- жесткость
- долговечность
- технологичность
- допускается устранение люфта
Недостатки:
- большие размеры зубчатого колеса, следовательно, высокая инерционность.
Зубчатые конические передачи
Достоинства:
- высокий КПД
- жесткость
- долговечность
- технологичность
Недостатки:
- большие размеры зубчатого колеса, следовательно, высокая инерционность
- сложность регулировки
- шум при работе.
Червячные передачи
Достоинства:
- жесткость
- малая инерционность
- низкий шум
Недостатки:
- низкий КПД
- сложность устранения люфта
Червячные передачи целесообразно устанавливать в первых степенях привода. В этом случае люфт, приведенный к первому звену, может оказаться незначительным.
Волновые передачи
Достоинства:
- малые габариты и вес
- практическое отсутствие люфта
- высокая точность позиционирования
- постоянство угловой скорости.
Недостатки
- пониженная жесткость и долговечность
- сложность изготовления
Волновые передачи широко применяются в роботах.
Цепные передачи и передачи зубчато-ременные.
Зубчатые передачи рейка – колесо, а также рычажные передачи применяются для преобразования поступательного движения штока пневмо- и гидроцилиндров во вращательное.
Для преобразования вращательного движения в поступательное применяется передача «винт-гайка» качения (шариковые и роликовые планетарные) и скольжения.
Шариковые винтовые передачи
Достоинства:
-высокий КПД
- допускают устранение люфта благодаря натягу сдвоенных гаек.
Недостатки:
- низкая жесткость
-сложность конструкции (необходимы оборотные каналы для возврата шариков)
-ограниченная частота вращения винта
Роликовые планетарные передачи «винт-гайка» устраняют недостатки шариков
Передачи «винт-гайка скольжения» применяются редко из-за низкого КПД и сложности устранения люфта.
§ Примеры кинематических схем некоторых механизмов МСР.
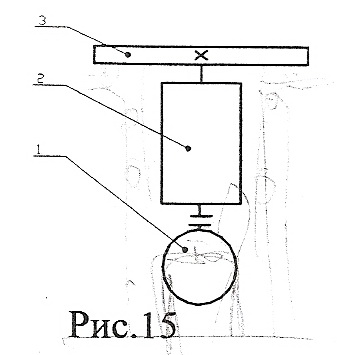
Механизмы поворота (рис 11-15)
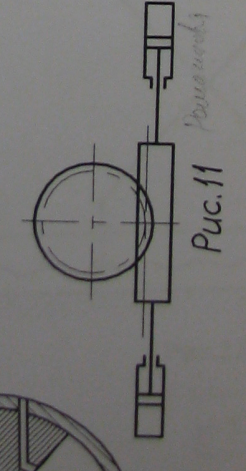

Поворотная часть робота
Мотор редуктора
Электродвигатель
Редуктор или система передач
Поворотная часть робота
Механизмы качания руки (рис 16-18)

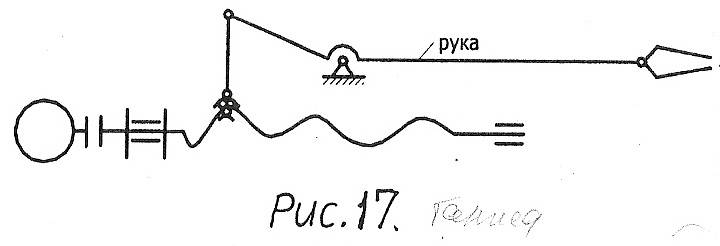
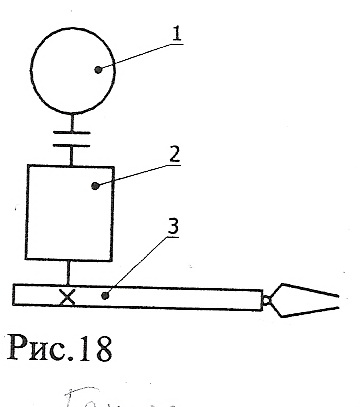
Рис 18: 1 – электродвигатель
– редуктор или система передач
– качающаяся рука
Механизм выдвижения руки ( рис 19-22)
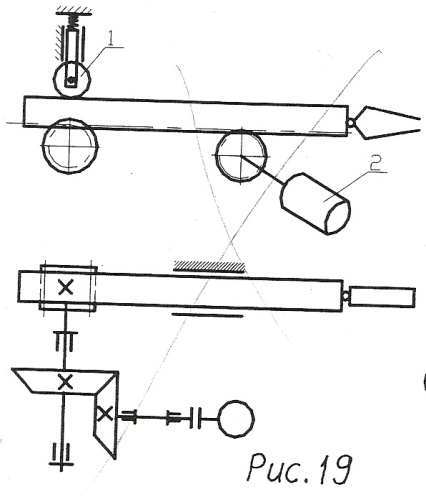
Рис 19
подпружиненный ролик для устранения люфта
датчик пути

электродвигатель
редуктор или система передач
зубчатая шестерня
рука-рейка

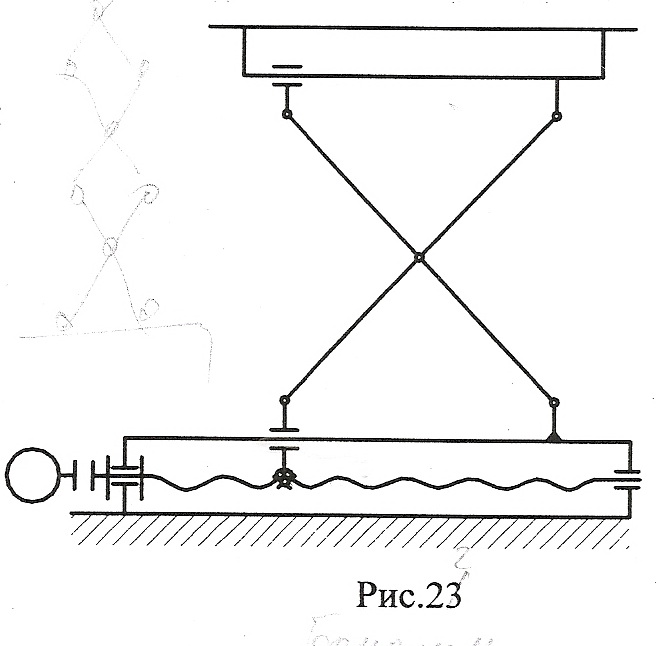
Механизмы вертикального перемещения (механизм подъёма).
Кинематические схемы механизмов вертикального перемещения аналогичны схемам механизмов выдвижения руки, но отличаются конструктивным исполнением
рис 23.
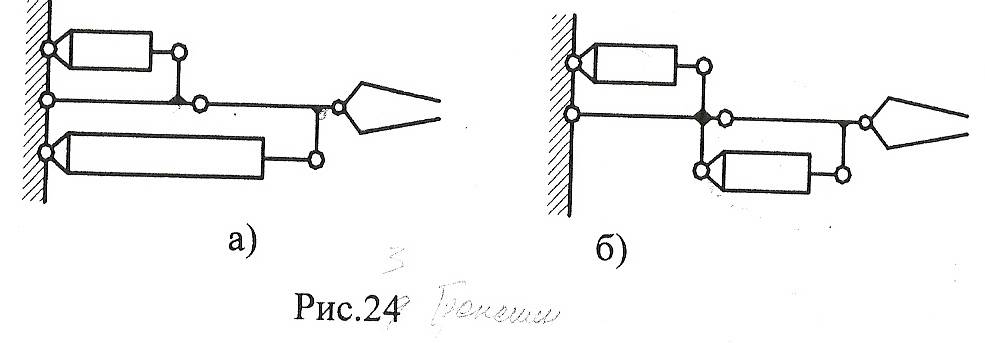
Механизмы ломающейся руки.
На Рис 24 представлены примеры кинематической схемы механизмов ломающейся руки с приводом от цилиндров, а на рис 25 – от электродвигателя.
1-электродвигатель, 2-редуктор.