

§3 Мощность электродвигателя для машин с гибким тяговым элементом.
Транспортирующие машины непрерывного транспортирования без гибкого тягового элемента.
§4.Вибрационные и винтовые конвейеры.
Вибрационные конвейеры.
Перемещают сильно пылящие, ядовитые, насыпные грузы на расстояния до 50…60м, редко до 100 м при возможности обеспечения герметичности.
Трасса конвейера бывает горизонтальная, слабонаклонная (обычно до 12 градусов, редко до 15-20) и вертикальные.
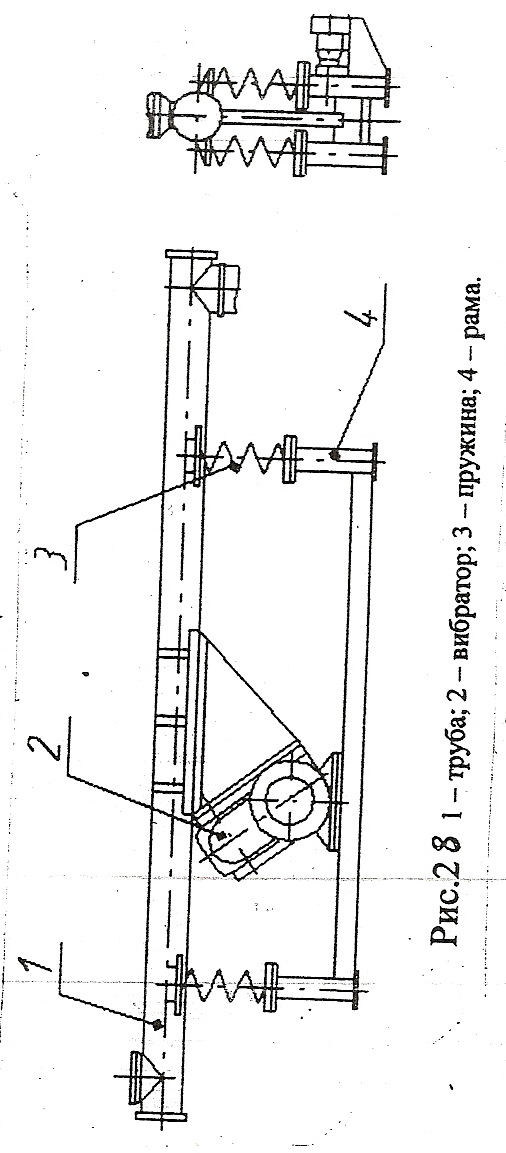
На рис. 28-6 – однотрубный горизонтальный виброконвейер.
Позиции на рис. 28:
1-труба;
2-вибратор;
3-пружина;
4-рама
Вибраторы бывают электромагнитные, механические;
Механические: эксцентриковые и дебалансовые (центровые).
Вибратор создает возмущающую силу, которая заставляет трубу совершать криволинейные колебания с небольшой амплитудой (от долей мм до 12-15мм) с большой частотой (до 50 Гц).
Направление колебаний трубы составляет с горизонталью угол β.
Схема движения частиц на вибрационном конвейере показана на рис.29-6.
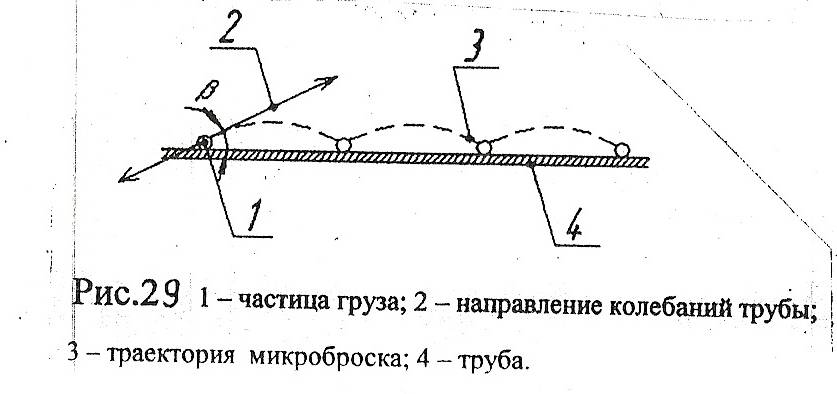
Вертикальная составляющая ускорения частиц груза больше ускорения свободного падения, поэтому частицы груза отрываются от трубы и совершают полёт. Скорость перемещения груза обычно 0,1…0,3 м/с, до 0,5…0,6 м/с.
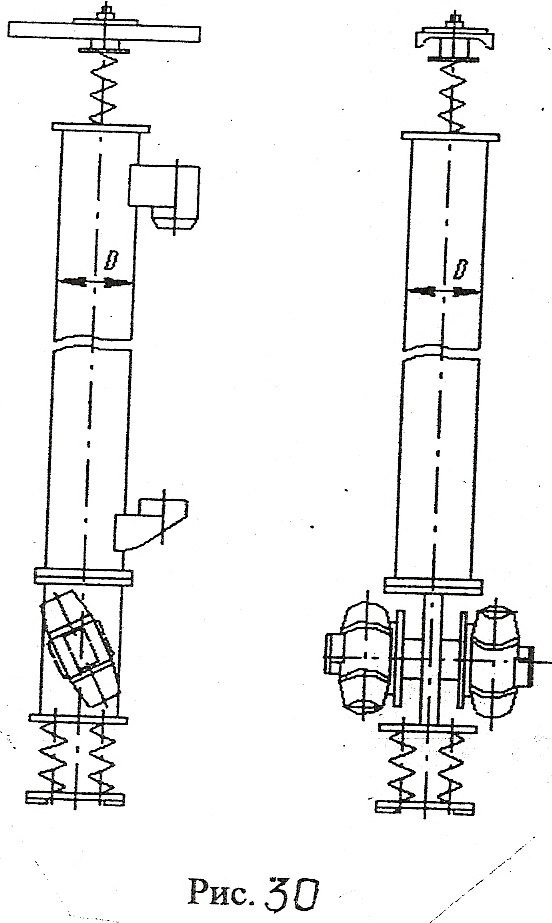
На рис. 30 – общий вид вертикального виброконвейера. Внутри вертикальной трубы выполнен винтовой желоб.
Винтовой желоб вместе с трубой одновременно совершает колебания по вертикали и крутильные колебания вокруг оси трубы (каждая точка трубы и желоба совершает колебания по отрезку винтовой линии).
Частицы груза перемещаются от нижнего загрузочного к верхнему разгрузочному лотку.
Угол подъёма винтового желоба ψ=4…8ْ.
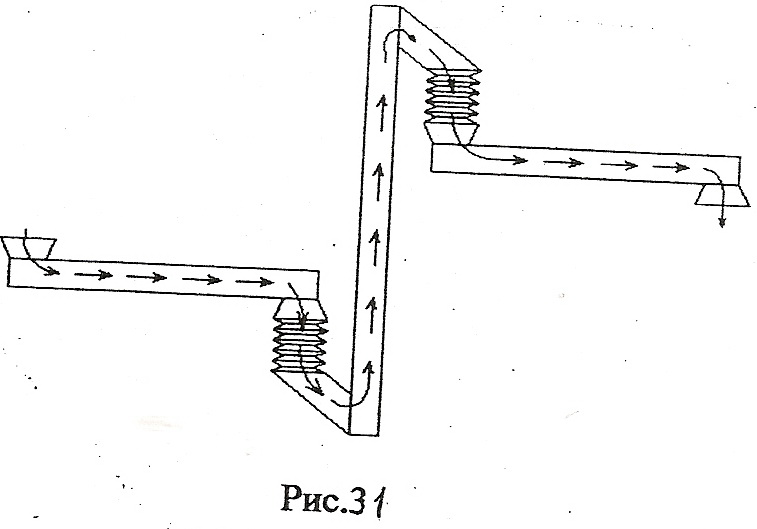
Соединяя между собой различные конвейеры, получают сложную пространственную трассу (рис.31).
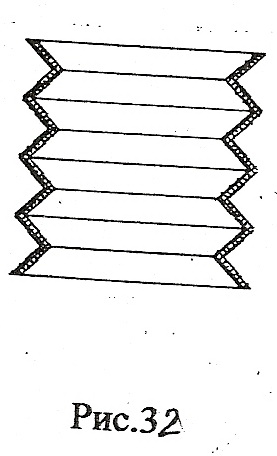
Отдельные конвейеры в пространственной трассе соединяются между собой герметизаторами(рис.32). Герметизаторы изготавливают из резины, армируя нитями методом вулканизации.
4.2. Винтовые конвейеры.
Перемещают сильно пылящие, горячие, ядовитые насыпные грузы на расстояния < 60м при возмжности обеспечения полной герметичности. Грузы перемещаются винтом по неподвижному желобу.
Трасса бывает горизонтальная, наклонная, вертикальная.
Горизонтальный желоб выполняют в виде трубы или лотка с крышкой( рис. 33). Вертикальный и наклонный жёлоб выполняют в виде трубы.
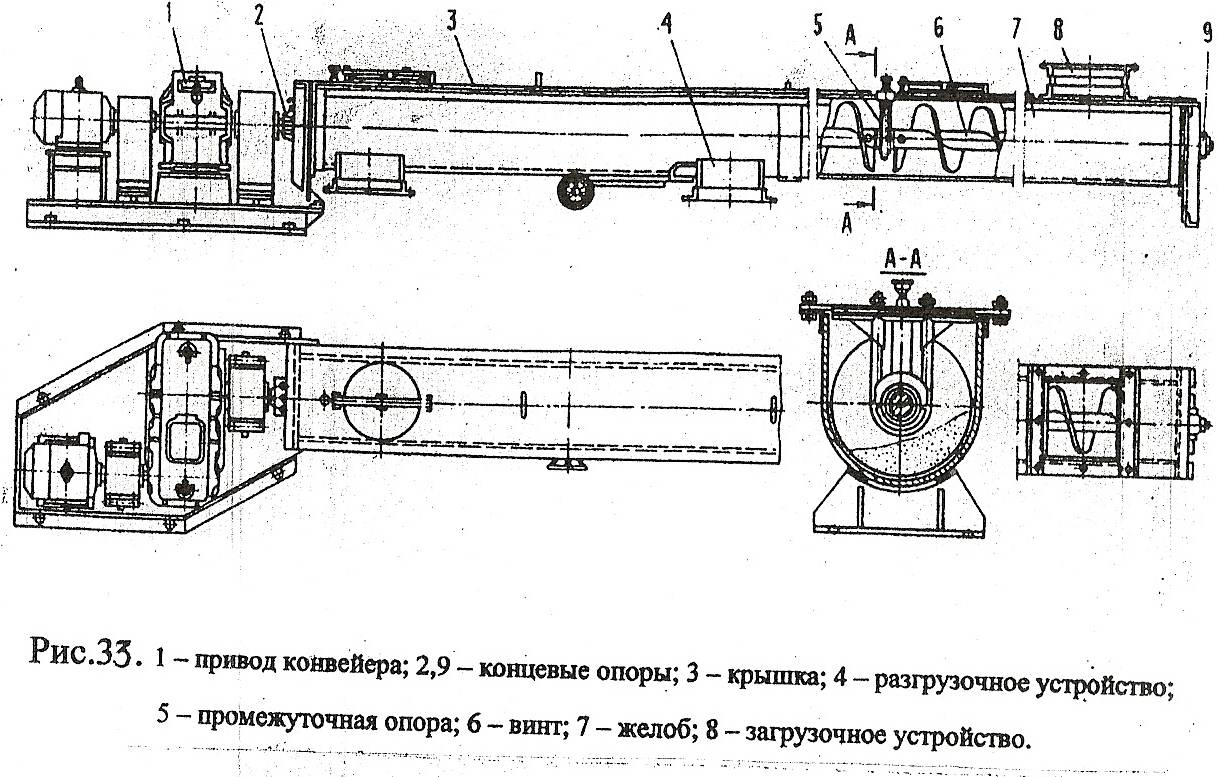
Длинные винты выполняются составными, в местах соединения частей винта устанавливаются промежуточные опоры 5, которые крепят.
Опору 2 винта со стороны разгрузки выполняют комбинированной с радиальным и упорным подшипниками.
Опору 9 со стороны загрузки выполняют плавающей с радиальным подшипником. При такой конструкции опор винт работает на растяжение.
Привод 1 конвейера целесообразно располагать со стороны разгрузки.
Главные недостатки винтового конвейера:
большие потери на трение
износ винта и желоба
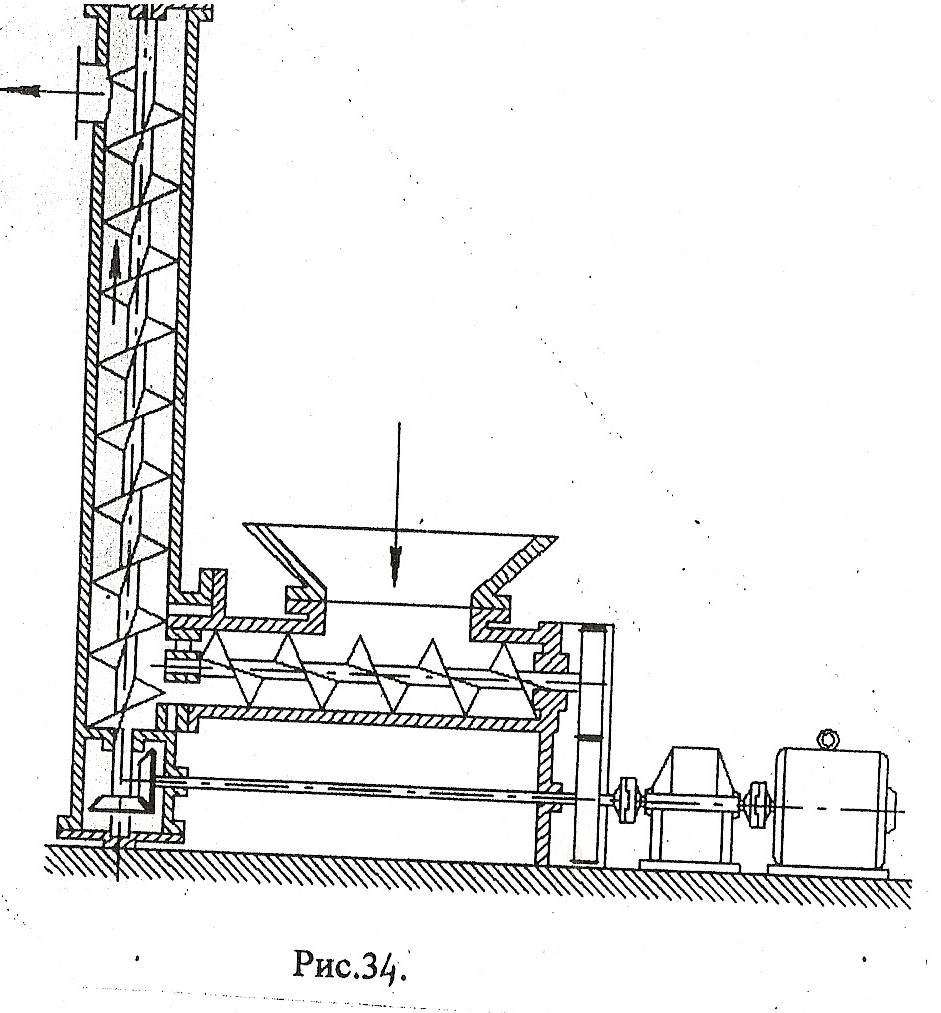
Соединяя между собой различные конвейеры, получают сложную пространственную трассу, пример – рис.34.
Широко применяется на зерновых элеваторах, мукомольных комбинатах, пищевых, промышленных, в сельскохозяйственном машиностроении, для отвода металлической стружки со станка.
Могут выполняться для дегазаторов, питателей, экструдеров, смесителей.