

§6.Производителность транспортирующих машин непрерывного транспортирования.
Различают объёмную, штучную и весовую производительности.
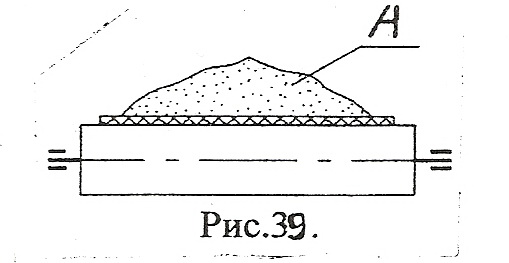
Объёмная производительность V, м³/час
При транспортировке сыпучих грузов непрерывным потоком
 (рис.39)
(рис.39)
При перемещении сыпучих грузов в отдельных емкостях
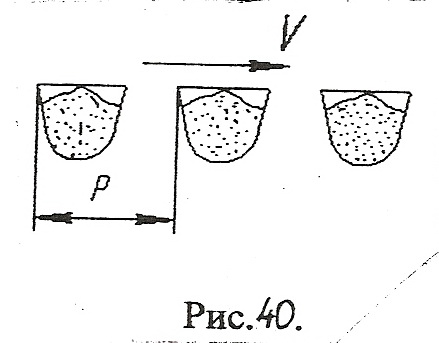
2)Штучная производительность z, единиц в час, ед/ч
3)Весовая производительность G, кН/час
3.1. При транспортировании сыпучих грузов
G=V*ρ, где V-объёмная производительность, м³/час, ρ-насыпная плотность груза, кН/м³.
3.2.При транспортировании штучных грузов
G=z*G1, где z-штучная производительность, ед/час, G1-вес одной штуки груза, кН.
§7.Транспортирующие устройства.
Гравитационные транспортирующие устройства – наклонные плоскость, желоб, труба.
Рассмотрим груз на наклонной плоскости рис.42.
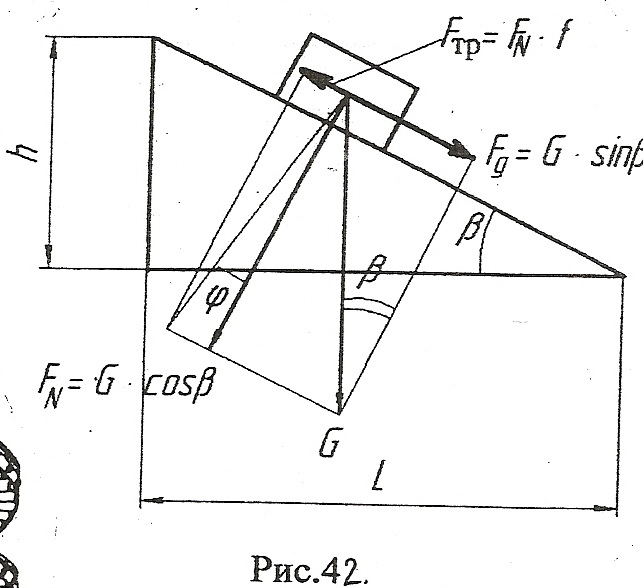
Сила, движущая груз:
Движению груза по наклонной плоскости препятствует сила трения
f – коэффициент трения;
Условие движения по наклонной плоскости груза, не имеющего начальной скорости
Скорость движения зависит от β и f. Гравитационные транспортирующие устройства применяют на открытых складах
При большой высоте h, когда наклонную плоскость невозможно расположить на одной прямой, применяют винтовые желобы.
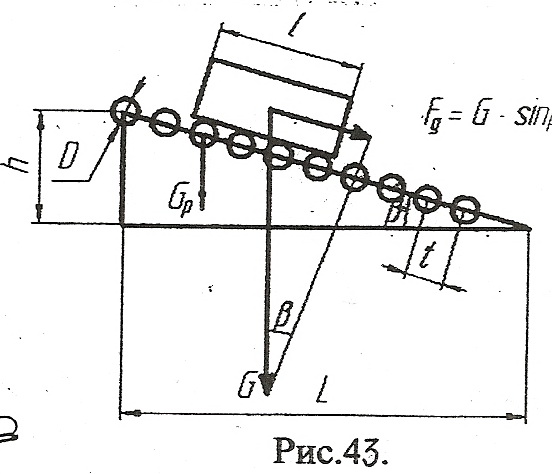
Рольганги.
Для уменьшения h при одной и той же L на наклонной плоскости устанавливают ролики. Сила, движущая груз по наклонному рольгангу.
![]()
Момент движущей силы на роликах.
Момент трения в опорах роликов
Кроме того, в месте контакта груза с роликом возможен момент сопротивления качению груза по ролику.
Суммарный момент сопротивления качению груза для всех роликов.

Условие движения груза по наклонному рольгангу, не имеющего начальной скорости.
При большой h применяются винтовые рольганги с коническими роликами(рис.44).
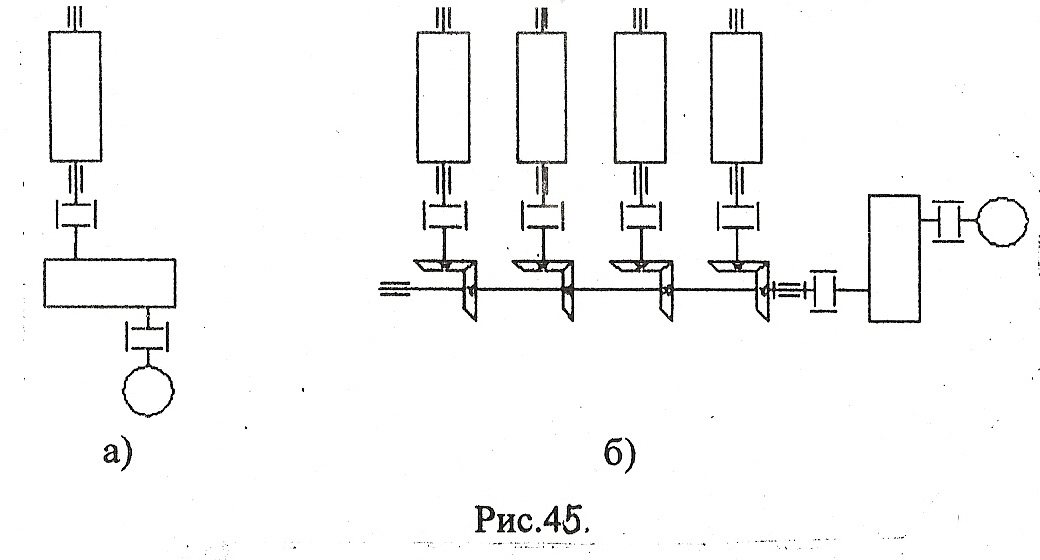
В обычных рольгангах конструкция роликов аналогична роликам в ленточных конвейерах. Применяются ролики с индивидуальным(рис.45а) или групповым(рис.45б) приводами.

Глава 2. Транспортирующие машины периодического транспортирования.
Будем рассматривать машины, применяемые в автоматическом машиностроительном производстве.
Автоматические колёсные транспортёрные тележки (АКТТ)
§1.Общие сведения.
АКТТ подразделяются на рельсовые и безрельсовые.
Достоинства рельсовых АКТТ:
-простая система управления;
-высокие скорость движения и точность позиционирования;
Недостатки:
-сложность изменения трассы при изменении гибкого автоматизированного производства (ГАП), поэтому наибольшее распространения получили безрельсовые АКТТ (робокары) благодаря простоте изменения маршрута.
Различают следующие виды АКТТ:
Автоматические тягачи (АТ), буксирующие грузонесущие тележки.
Транспортные тележки (ТТ), способные помимо буксировки автономно перевозить груз на собственной платформе. Тележки для перевоза деталей на спутниках, установленные на грузонесущей платформе, называются роботрейлерами.
Манипуляционные тележки (МТ), способные помимо буксирования и автономной перевозки грузов производить разгрузку и разгрузку, сортировку и ориентирование.
МТ бывают с роликовым конвейером на платформе тележки, с выдвижным в горизонтальном направлении столом, подъёмным столом, с выдвижным и подъёмным столом одновременно, с манипуляторами различных типов. Тележки с роликовыми конвейерами и выдвижным в горизонтальном направлении столом нецелесообразны для транспортировки спутников, так как при перегрузках изнашивается нижняя плоскость высокоточных дорогостоящих спутников.
Рассмотрим процесс загрузки и разгрузки тележки с подъёмным столом (рис. 46).
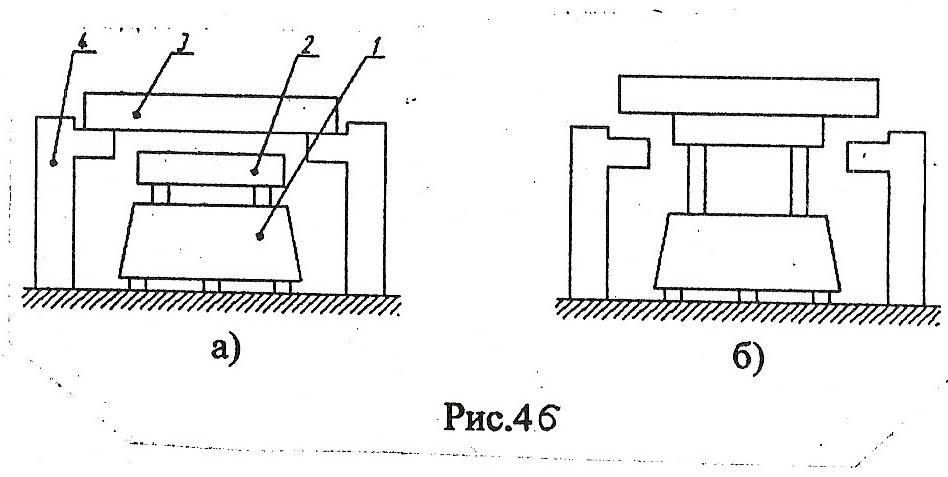
Тележка 1 с подъёмным столом 2 заезжает между стойками 4, на которых установлен груз 3. Стол поднимается и забирает груз 3. Разгрузка производится в обратной последовательности. Помимо отмеченных существуют и другие системы управления.
