

Смещенный объем
Смещенный объем – прибавленный или удаленный в процессе деформации объем в направлении одной из осей. Если рассматривать деформацию по высоте, смещенный объем – произведение начальной площади поперечного сечения на абсолютное обжатие.
![]()
![]()
Для более точных расчетов необходимо интегрировать по всему
диапазону изменений высоты:
 - истинный смещенный объем
- истинный смещенный объем
![]()
![]()
Vdh
+ Vdb
+ VdL
= V
(ln
![]() + ln
+ ln
![]() + ln
+ ln
![]() )
= 0, т.е. сумма истинных смещенных
объемов по трем главным осям равна нулю.
)
= 0, т.е. сумма истинных смещенных
объемов по трем главным осям равна нулю.
Если по некоторой оси происходит
уменьшение размеров тела, то истинный
смещенный объем меньше нуля, если
увеличение – больше нуля. Смещенный
объем может быть равен, больше или меньше
реального объема тела. Поскольку по
высоте происходит уменьшение размера,
т.е. h1<h0, то
![]() будет
отрицательным. Смещенный объем по
величине равен истинному объему тела,
если
будет
отрицательным. Смещенный объем по
величине равен истинному объему тела,
если
![]() ,
т.е.
,
т.е.
![]() ,
или если
,
или если
![]() ,
т.е.
,
т.е.
![]() .
Таким образом, истинный смещенный объем
будет больше объема тела, когда h<0.368
или
>2.718
(т.е.
.
Таким образом, истинный смещенный объем
будет больше объема тела, когда h<0.368
или
>2.718
(т.е.
![]() >0.632
или
<1.718).
>0.632
или
<1.718).
Общий случай деформации
В общем случае деформация нелинейная, а
значит, кроме растяжения или сжатия в
металле имеется и угловая деформация,
т.е. кручение. А значит, в общем виде
деформированное состояние в точке
определяется не только линейными
деформациями, но и деформациями сдвига.
общем случае деформация нелинейная, а
значит, кроме растяжения или сжатия в
металле имеется и угловая деформация,
т.е. кручение. А значит, в общем виде
деформированное состояние в точке
определяется не только линейными
деформациями, но и деформациями сдвига.
Рассмотрим деформацию элемента
прямоугольной формы, расположенного в
окрестностях произвольной точки (см.
рисунок). Растяжение элемента вдоль
трех осей определяется тремя линейными
деформациями
![]() :
:
![]()
где u – проекция перемещения точки на ось x, v – на ось y, w – на ось z.
Изгиб элемента определяется шестью
деформациями сдвига
![]() :
:
![]()
![]()
![]()
![]()
Относительная деформация сдвига
определяется углом между направлениями
ребер в исходном состоянии и после
деформации (при линейной деформации
углы и деформации сдвига равны нулю),
т.е.
![]() .
.
Таким образом, напряженное состояние в точке определяется тензором деформаций:
В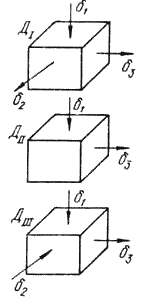 каждой точке тела существуют оси
деформации, которые называют главными
осями деформации. Эти оси обладают
тем свойством, что волокна в теле, им
перпендикулярные, испытывают только
линейные деформации (укорачиваются или
удлиняются), но не поворачиваются, т.е.
сдвиги в главных осях деформации равны
нулю. Деформации вдоль главных осей
называются главными деформациями и
обозначаются
каждой точке тела существуют оси
деформации, которые называют главными
осями деформации. Эти оси обладают
тем свойством, что волокна в теле, им
перпендикулярные, испытывают только
линейные деформации (укорачиваются или
удлиняются), но не поворачиваются, т.е.
сдвиги в главных осях деформации равны
нулю. Деформации вдоль главных осей
называются главными деформациями и
обозначаются
![]() .
Тензор деформаций в главных осях имеет
вид:
.
Тензор деформаций в главных осях имеет
вид:
Существуют 3 схемы главных деформаций: две объемные (растяжение-растяжение-сжатие и растяжение-сжатие-сжатие) и одна плоская (растяжение-сжатие, по третьей оси деформации нет). Из закона постоянства объема следует, что все главные деформации не могу быть одного знака, т.е. растяжение или сжатие не может быть по всем осям осям одновременно.
Скорость деформации
Скорость деформации – изменение степени деформации в единицу времени. Совокупность всех скоростей деформации описывается тензором скоростей деформации:
 ,
где
,
где
![]()
Из формул видно, что размерность скорости деформации – c-1.
Скорость деформирования – скорость хода инструмента. Единица измерения – м/с. Скорость деформации зависит от скорости деформирования и размера тела в направлении деформации.
![]() ,
где Vh
– скорость деформирования.
,
где Vh
– скорость деформирования.
Даже если скорость движения инструмента постоянна, скорость деформации изменяется из-за изменения размеров заготовки. Средняя скорость деформации за время обработки:
![]() .
.
Скорости деформации, соответствующие главным направлениям, называются главными скоростями деформации.