

1.3. Особенности реализации системы управления полетом ракеты
Для обеспечения вывода ракеты в район встречи с целью необходимо управлять движением центра масс ракеты так, чтобы при этом требуемые перегрузки ракеты были минимальными.
Система управления полетом ракеты ПЗРК основана на самонаведении, которая работает на принципе непрерывного информационного контакта между ракетой и целью вдоль линии соединяющей центр масс ракеты с целью.
В системах самонаведения за ошибку наведения приняв мгновенный промах ракеты, который определяется величиной угловой скорости линии визирования "ракета-цель".
Принятый в системе самонаведения ракет ПЗРК метод пропорционального сближения с целью предполагает прямую пропорциональную зависимость между управляющей силой ракеты и ошибкой системы самонаведения в виде
У = К1Ел (1)
где У, н - управляющая сила ракеты;
Ел рад с‾¹ - угловая скорость линии визирования цели;
К1 н с рад‾¹ - коэффициент пропорциональности.
Для обеспечения сближения ракеты с целью по методу пропорционального сближения бортовая аппаратура ракеты должна иметь следующий состав:
головку самонаведения, обеспечивающую захват и авто сопровождение воздушной цели и выработку сигнала, пропорционального ошибке наведения - угловой скорости линии визировяния цели;
устройство выработки команд, обеспечивающее формирование закона управления рулями ракеты для ее сближения с цель по методу пропорционального сближения;
автопилот, обеспечивающий отработку управления рулями с помощью рулевого привода и улучшение качества управления.
В связи с жесткими ограничениями на массу и объем бортовой аппаратуры ЗУР ПЗРК, в основу ее построения заложен принцип одноканального управления вращающейся ракетой с работающим в релейном режиме рулевым приводом. Рассмотрим необходимые условия для реализации выражения (1), где в качестве управляющей примем среднюю силу, создаваемую рулями и корпусом за один оборот ракеты.
Для реализации управления по методу пропорционального сближения при одноканальном релейном рулевом приводе необходимо:
принудительно вращать ракету относительно продольной оси (для создания управляющей силы в любом поперечном направлении);
иметь сигнал управления с информацией об ошибке наведения (Ел) в виде сигнала переменного тока на частоте вращения ракеты, т.е. дважды менять знак за оборот ракеты;
кроме сигнала управления, на вход рулевого привода подавать сигнал линеаризации стабильной амплитуды и частоты, равной удвоенной частоте вращения ракеты.
На рис. 4 а,б,в,г представлены годографы вектора управляющей силы в зависимости от величины и вида суммарного сигнала управления
Uc = UEл + Uл,
где UEл = UEл sin(ωpt + μц) - ошибка наведения ;
Uл = Uл sin2ωpt - сигнал линеаризации.
Как видно из рис, 4г неcкомпенсированная (незаштрихованная) площадь сектора зависит от амплитуды сигнал UEл и определяет величину, а ось симметрии нескомпенсированного сектора (определяется фазой μц сигнала UEл) - направление средней за оборот управляющей силы (У). Если амплитуда UEл в 1,5...2 раза превышает амплитуду Uл, то переброс рулей будет осуществляться через 180°, при этом управляющая сила У будет иметь максимальное значение.
В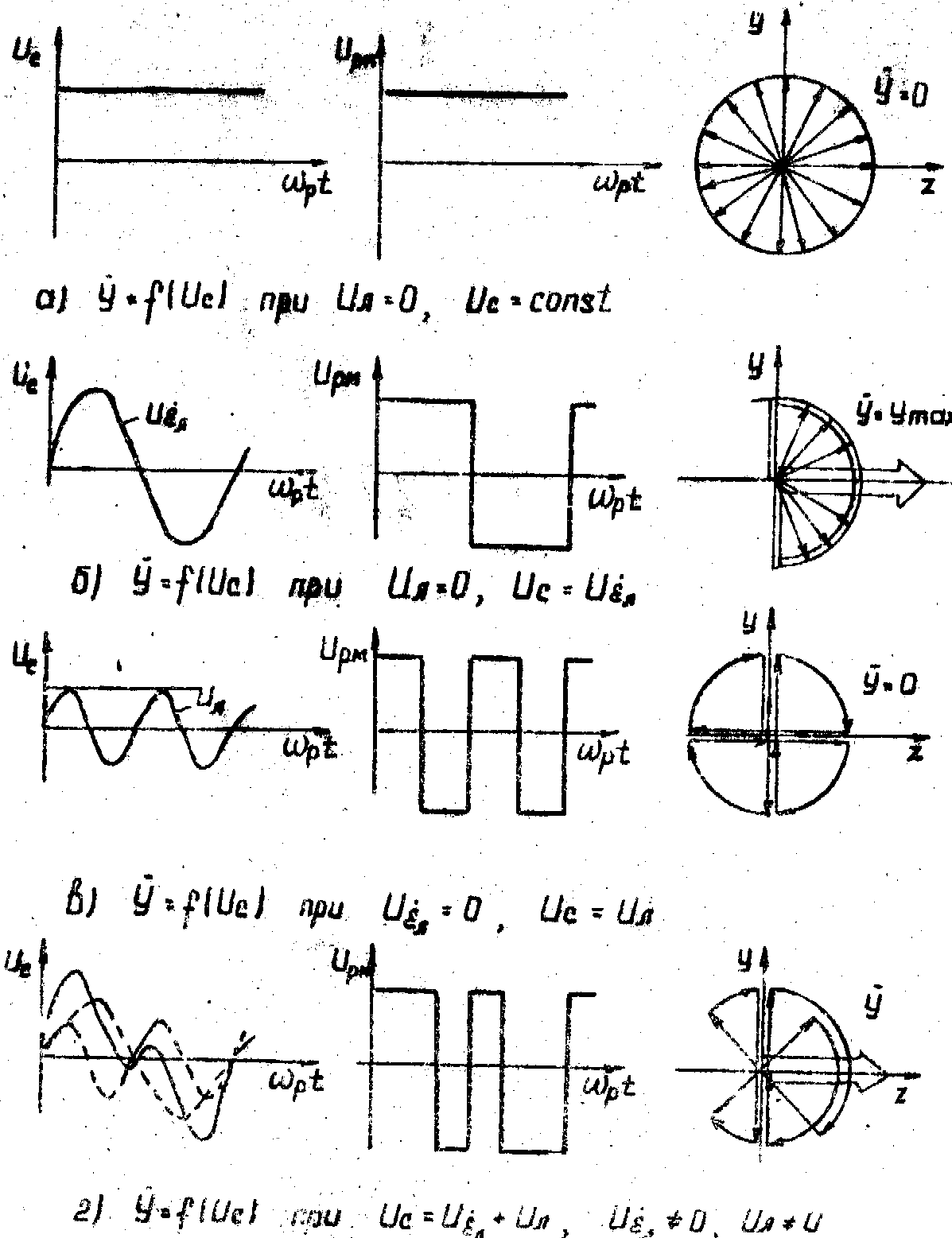 еличина
управляющей силы характеризуется
коэффициентом команды (Кк), под которым
понимается степень использования
максимальной управляющей силы (Кк =
У/Уmax). Зависимость коэффициента команды
как от соотношения
амплитудных значений UEл и Uл приведена
на рис, 5.
еличина
управляющей силы характеризуется
коэффициентом команды (Кк), под которым
понимается степень использования
максимальной управляющей силы (Кк =
У/Уmax). Зависимость коэффициента команды
как от соотношения
амплитудных значений UEл и Uл приведена
на рис, 5.
Рис. 4. Зависимость управляющей силы У от величины
суммарного сигнала управления
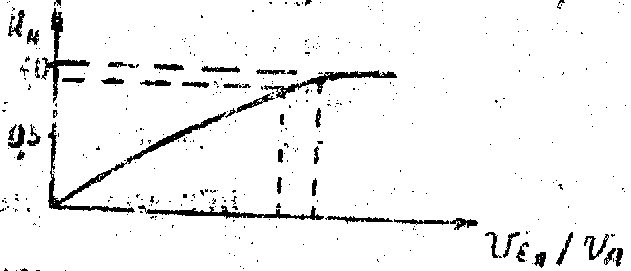
Рис. 5. Зависимость коэффициента команды от
угловой скорости линии визирования