

Виды частотных характеристик и способы их определения.
К частотным характеристикам относят различные реакции звена или системы на гармонические воздействия. Основными характеристиками являются: амплитудо-частотная характеристика (АЧХ), фазо-частотная характеристика (ФЧХ), амплитудо-фазо частотная характеристика (АФЧХ) или амплитудо-фазовая характеристика (АФХ).
АЧХ – зависимость отношения амплитуды выходного сигнала к амплитуде входного сигнала от частоты.
Амплитудно-фазовая частотная характеристика (АФЧХ) — удобное представление частотного отклика линейной стационарной динамической системы в виде графика в комплексных координатах. На таком графике частота выступает в качестве параметра кривой, фаза и амплитуда системы на заданной частоте представляется углом и длиной радиус-вектора каждой точки характеристики. По сути такой график объединяет на одной плоскости амплитудно-частотную и фазо-частотную характеристики.
Термин употребляется также в применении к передаточной функции системы, записанной в виде преобразования Фурье выходного сигнала, поделённого на преобразование Фурье входного сигнала.
Применения
АФЧХ применяется в основном для анализа систем, в частности исследования системы на устойчивость и её запасов.
АФЧХ является классическим средством анализа устойчивости линейных систем. Существует множество программных продуктов, позволяющих проводить исследования на устойчивость частотными методами.
Релейные исполнительные механизмы.
Демпфирование пневмопривода промышленных роботов.
Ввиду высоких скоростей движения поршня пневмодвигателя необходимо осуществлять его торможение в конце прямого и обратного хода. Это повышает точность позиционирования и снижает динамические нагрузки в ПР.
В пневмоприводах промышленных роботов (ПР) используются два типа торможения: с помощью демпфирующих устройств или путем дросселирования.
При использовании демпфирующих устройств (внешними устройствами) торможение происходит на небольшом участке в конце хода при подходе к точке позиционирования. При использовании дросселей (торможение рабочим телом) разгон и торможение осуществляется на большей части хода, чем достигается требуемый закон изменения кинематических параметров в течение всего цикла движения.
Понятие о частотных характеристиках сау
Понятие частотных характеристик является важнейшим понятием, широко применяемым в теории управления. Методы, основанные на применении частотных характеристик, являются наиболее удобными в инженерной практике в классе систем с одним входом и выходом.
Функция W(j), равная отношению выходного сигнала к входному при изменении входного сигнала по гармоническому закону, называется частотной передаточной функцией. Она может быть получена путем замены p на j в выражении W(p). В более общей формулировке частотную передаточную функцию можно представить в виде отношения частотных спектров выходного и входного сигнала:
W(j) = Y(j)/U(j) = W(p)|p=j.
Частотная передаточная функция линейного звена является изображением Фурье его импульсной функции и может определяться по интегральному преобразованию:
W(j) = h(t) exp(-jt) dt.
Для односторонних функций h(t), W(j) есть комплексная функция, которую иногда называют амплитудно-фазо-частотной характеристикой (АФЧХ):
W(j) = A() exp(j()) = P() + jQ(),
где P() - вещественная, Q() - мнимая частотные характеристики, А() - амплитудная частотная характеристика (АЧХ), () - фазовая частотная характеристика (ФЧХ). АЧХ дает отношение амплитуд выходного и входного сигналов, ФЧХ - сдвиг по фазе выходной величины относительно входной:
()
= Um
/Ym =
|W(j)| = ,
,
() = arctg(Q()/P()).
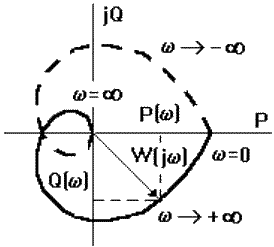
Годограф, приведенный на рис. 3.4.1, является стандартным методом отображения АФЧХ на комплексной плоскости с координатами ReW(ω) и ImW(ω). Параметром на кривой годографа является частота, изменяющаяся в интервале от 0 до ∞. Для произвольной частоты ω радиус вектор в точке W(jω) показывает амплитуду выходного сигнала, а угол (ω) - сдвиг фазы между выходным и входным сигналом. Иногда W(jω) называют комплексным коэффициентом передачи, подразумевая, что АФЧХ является обобщением обычного коэффициента усиления К на случай его зависимости от частоты и фазового сдвига, также зависящего от частоты. Комплексно сопряженные ветви АФЧХ, отличающиеся знаком j, зеркальны относительно вещественной оси.
Для частотного анализа систем применяется также раздельное построение графиков АЧХ и ФЧХ, если в том появляется необходимость.
Цифровые и информационно-цифровые датчики.
Понятие элементарного звена и типовые звенья систем автоматического управления.
Электромагнитные релейные исполнительные механизмы.
РЕЛЕЙНЫЕ ИСПОЛНИТЕЛЬНЫЕ МЕХАНИЗМЫ
В системах автоматики широко применяются элементы и устройства дискретного принципа действия. Среди этих устройств одной из самых больших групп являются реле. В системах управления и регулирования энергетических электрических и энергомеханических потоков энергии релейные элементы применяются не только как промежуточные и усилительные устройства автоматики, а также они часто используются как оконечные выходные элементы этих систем. В этом случае релейные элементы выполняют функции исполнительных механизмов и называются релейными исполнительными механизмами (РИМ). В настоящем пособии рассматриваются лишь те релейные элементы, которые используются в системах автоматики в качестве РИМ.
В связи с широким внедрением полупроводниковой интегральной техники область применения электромеханических устройств значительно сузилась, но общее количество используемых реле из года в год растет, причем в сельскохозяйственной автоматике они продолжают оставаться основными элементами. Это объясняется тем, что электромеханические устройства по сравнению с бесконтактными имеют ряд уникальных свойств: полное отсутствие гальванической связи между входными и выходными сигналами; возможность коммутации как постоянных, так и переменных токов; допустимость значительных перегрузок в цепи контактов, как по току, так и по напряжению; малые потери мощности в контактном переходе; бесконечное отношение сопротивлений контакта в разомкнутом и замкнутом состояниях; независимость от воздействия электрических и магнитных полей; нечувствительность к температурным перегрузкам; высокая электрическая прочность; простота в обслуживании и эксплуатации; значительно низкая стоимость, чем у других типов реле и т. д.
В качестве РИМ в системах автоматики широко применяются: электромагнитные реле, электромагнитные пускатели и контакторы, герконовые реле и другие.