

Сравнительная характеристика приводов промышленных роботов.
Приводы промышленных роботов включают в себя двигатель, систему управления, передаточные механизмы, тормозные устройства, датчики обратной связи и коммуникации. Коммуникации необходимы для передачи энергии к приводам и передачи сигналов управления, а также для выполнения обратной связи.
Выбор типа привода зависит от функционального назначения промышленных роботов (ПР). Основными факторами, определяющими выбор типа привода являются: назначение и условия эксплуатации, грузоподъемность и требуемые динамические характеристики конструкции, а также вид системы управления.
К приводу любого вида предъявляют общие требования:
– минимальные габаритные размеры при высоких энергетических показателях, обеспечивающие большое значение отношения выходной мощности к массе;
– возможность работы в режиме автоматического управления и регулирования, обеспечивающем оптимальные законы разгона и торможения при минимальном времени переходных процессов;
– быстродействие, т.е. осуществление движений исполнительных механизмов с высокими скоростями и малой погрешностью позиционирования;
– малая масса элементов привода при высоком КПД всей конструкции;
– надежность и долговечность элементов конструкции;
– удобство монтажа, ремонта, обслуживания, переналадки и бесшумность работы.
В зависимости от используемого вида энергии приводы подразделяют на гидравлические, пневматические, электрические и комбинированные (например, электрогидравлические, гидропневматические и др.)
Пневматические приводы применяются в 20…30% (по другим оценкам в 40-50%) серийно выпускаемых ПР. Их используют для легких и средних (по грузоподъемности до 20 кг) ПР при числе степеней подвижности 2…3. Погрешность позиционирования в этих приводах не превышает ± 0,1 мм. Скорость ведомого звена привода при линейном перемещении составляет до 1000 мм/с, при угловом – до 60 об/мин. Они имеют простую конструкцию, низкую стоимость и достаточно надежны в работе.
Вследствие низкой регулировочной способности их мало используют в позиционных и контурных режимах работы, и они имеют цикловое управление, как простейший вариант позиционного (задается две точки – начало и конец перемещения).
Гидравлические приводы применяются в 30% серийно выпускаемых средних и тяжелых ПР при числе степеней подвижности 3…4. Погрешность позиционирования в этих приводах не превышает ± 0,5 мм при скорости линейного перемещения до 0,8…1200 мм/с. Эти приводы имеют сложную конструкцию, высокую стоимость изготовления и эксплуатации. Гидравлический привод имеет хорошую регулировочную способность, и его используют в ПР с позиционным и контурным режимом работы.
Электрические приводы используются в 40…50% серийно выпускаемых ПР со средней грузоподъемностью и числом степеней подвижности 3…6. Точность позиционирования электрического привода достигает значений до ± 0,05 мм. Их применяют как в позиционном, так и в контурном режимах работы.
Преимуществами электроприводов являются более высокая экономичность, КПД, удобство сборки и хорошие регулировочные свойства.
Как правило, в электроприводах используют синхронные, шаговые и двигатели постоянного тока. Асинхронные двигатели применяются реже, что связано с трудоемкостью управления частотой вращения.
Комбинированные приводы позволяют максимально использовать достоинства отдельных типов приводов. Чаще всего в промышленных роботах применяют комбинацию пневматического и гидравлического приводов (пневмогидравлические и гидропневматические), а также электрического и гидравлического (электрогидравлические). В конструкциях промышленных роботов пневмогидравлические приводы имеют ограниченное применение. В них в качестве исполнительного органа используется пневмоцилиндр, а стабилизация его скорости и гидравлическая фиксация осуществляется гидросистемой.
В гидропневматическом приводе в качестве исполнительных двигателей применяют гидродвигатели, а пневмосистема применяется для создания необходимого давления в гидросистеме, что позволяет отказаться от гидронасосных станций.
Понятие о передаточных функциях.
Передаточная функция — один из способов математического описания динамической системы. Используется в основном в теории управления, связи, цифровой обработке сигналов. Представляет собой дифференциальный оператор, выражающий связь между входом и выходом линейной стационарной системы. Зная входной сигнал системы и передаточную функцию, можно восстановить выходной сигнал.
В теории управления передаточная функция непрерывной системы представляет собой отношение преобразования Лапласа выходного сигнала к преобразованию Лапласа входного сигнала при нулевых начальных условиях.
Динамические характеристики датчиков.
Встационарных условиях датчик полностью описывается своей передаточной функцией, диапазоном измеряемых значений, калибровочными коэффициентами и т.д. Однако на практике выходной сигнал датчика не всегда достаточно точно отслеживает изменение внешнего сигнала. Причины: инерционность самого датчика и особенности его соединения с источником внешних воздействий, не позволяющая сигналам распространяться с бесконечно большой скоростью.
Динамические характеристики- параметры датчика, зависящие от времени.
Динамические погрешности – погрешность датчика из-за ограниченности его быстродействия.Отличие между статическими и динамическими погрешностями - последние всегда зависят от времени. Если датчик входит в состав измерительного комплекса, обладающего определенными динамическими характеристиками, внесение дополнительных динамических погрешностей может привести, в лучшем случае, к задержке отображения реального значения внешнего воздействия, а, в худшем случае, - к возникновению колебаний.
Время разогрева — время между подачей на датчик электрического напряжения или сигнала возбуждения и моментом, когда датчик начинает работать, обеспечивая требуемую точность измерений. Многие датчики обладают несущественным временем разогрева. Однако некоторые детекторы, особенно работающие в устройствах с контролируемой температурой (термостатах), для своего разогрева требуют секунды, а то и минуты.
В теории автоматического управления (ТАУ) принято описывать взаимосвязь между входами и выходами устройства в виде линейных дифференциальных уравнений с постоянными коэффициентами. Очевидно, что при решении таких уравнений можно определить динамические характеристики устройства. В зависимости от конструкций датчиков, уравнения, описывающие их, могут иметь разный порядок.
Датчики нулевого порядка - имеют линейную передаточную функцию и могут быть описаны следующей зависимостью от времени:
S(t)=a + bs(t).
Коэффициент а называется смещением, b— статической чувствительностью. Из вида уравнения видно, что оно описывает датчики в состав которых не входят энергонакопительные элементы, такие как конденсаторы или массы. Датчики нулевого порядка относятся к устройствам мгновенного действия. Иными словами, у таких датчиков нет необходимости определять динамические характеристики.
Датчики первого порядка - содержат один энергонакопительный элемент и характеризуется уравнением вида:
Типичный пример датчика первого порядка - датчик температуры, в котором роль энергонакопительного элемента играет теплоемкость. Для описания датчиков первого порядка существует несколько способов.
Частотная характеристика - наиболее часто используемый способ описания инерционности датчиков - показывающая насколько быстро датчик может среагировать на изменение внешнего воздействия.
Для отображения относительного уменьшения выходного сигнала при увеличении частоты применяется амплитудно-частотная характеристика. Для описания динамических характеристик датчиков часто используется граничная частота, соответствующая 3-дБ снижению выходного сигнала, показывающая на какой частоте происходит 30% уменьшение выходного напряжения или тока.
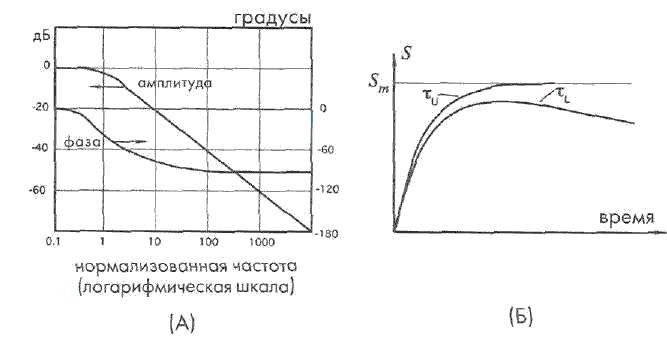
Частотные характеристики:
А - частотная характеристика датчика первого порядка,
Б - частотная характеристика датчика с ограничениями по верхней и нижней частоте среза, где ?u и ?r -соответствующие постоянные времени
Эта граничная частота называется верхней частотой среза, считается предельной частотой работы датчика.
Быстродействие датчика – скорость его реакции, выражаемая в единицах внешнего воздействия на единицу времени. Способ описания: АЧХ или быстродействие, зависит от типа датчика, области применения и предпочтений разработчика.
Другой способ описания быстродействия заключается в определении времени, требуемого для достижения выходным сигналом датчика уровня 90% от стационарного или максимального значения при подаче на его вход ступенчатого внешнего воздействия.
Постоянная времени - мера инерционности датчика. Широко используется для датчиков первого порядка. В терминах электрических величин она равна произведению емкости на сопротивление: ? = CR. В тепловых терминах под С и R понимаются теплоемкость и тепловое сопротивление. Как правило, постоянная времени довольно легко измеряется. Временная зависимость системы первого порядка имеет вид:
![]()
где Sm — установившееся значение выходного сигнала, t — время, а e — основание натурального логарифма. Заменяя tна ?, получаем:
S/Sm=1-1/е = 0,6321
Т.е. по истечении времени, равного постоянной времени, выходной сигнал датчика достигает уровня, составляющего приблизительно 63% от установившегося значения. Аналогично можно показать, что по истечении времени, равного двум постоянным времени, уровень выходного сигнала составит 86.5%, а после трех постоянных времени - 95%.
Частота среза – наименьшая или наибольшая частота внешних воздействий, которую датчик может воспринять без искажений. Верхняя частота среза показывает насколько быстро датчик реагирует на внешнее воздействие, а нижняя частота среза - с каким самым медленным сигналом он может работать. На практике для установления связи между постоянной времени датчика первого порядка и его частотой среза fc, как верхней так и нижней, используют простую формулу:
Фазовый сдвиг - на определенной частоте показывает насколько выходной сигнал отстает от внешнего воздействия. Сдвиг измеряется либо в градусах, либо в радианах и обычно указывается для датчиков, работающих с периодическими сигналами. Если датчик входит в состав измерительной системы с обратными связями, всегда необходимо знать его фазовые характеристики. Фазовый сдвиг датчика может снизить запас по фазе всей системы в целом и привести к возникновению нестабильности.
Датчики второго порядка описывают поведение датчиков с двумя энергонакопительными элементами (и описываются дифференциальными уравнениями второго порядка):
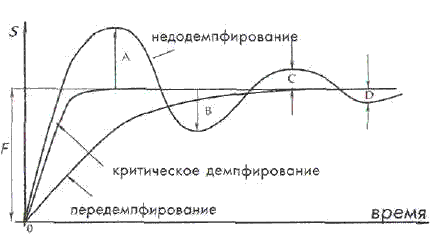
Примером датчика второго порядка является акселерометр, в состав которого входит масса и пружина. На выходах датчиков второго порядка после подачи на их входы ступенчатого воздействия практически всегда появляются колебания. Эти колебания могут быть очень кратковременными, тогда говорят, что датчик демпфирован, или могут длиться продолжительное время, а то и постоянно. Продолжительные колебания на выходе датчика являются свидетельством его неправильной работы.
Резонансная (собственная) частота – частота датчика второго порядка выражается в герцах или радианах в секунду. На собственной частоте происходит значительное увеличение выходного сигнала датчика. Обычно производители указывают значение собственной частоты датчика и его коэффициент затухания (демпфирования). От резонансной частоты зависят механические, тепловые и электрические свойства детекторов. Обычно рабочий частотный диапазон датчиков выбирается либо значительно ниже собственной частоты (по крайней мере на 60%), либо выше ее. Однако для некоторых типов датчиков резонансная частота является рабочей. Например, детекторы разрушения стекла, используемые в охранных системах, настраиваются на узкую полосу частот в зоне частоты резонанса, характерную для акустического спектра, производимого разбивающимся стеклом.
Демпфирование - это значительное снижение или подавление колебаний в датчиках второго и более высоких порядков. Когда выходной сигнал устанавливается достаточно быстро и не выходит за пределы стационарного значения, говорят, что система обладает критическим затуханием, а ее коэффициент демпфирования равен 1. Когда коэффициент затухания меньше 1, и выходной сигнал превышает установившееся значение, говорят, что система недодемфирована. А когда коэффициент затухания больше 1, и сигнал устанавливается гораздо медленнее, чем в системе с критическим затуханием, говорят, что система передемпфирована.
Для колебательного выходного сигнала коэффициент затухания или демпфирования определяется абсолютным значением отношения большей амплитуды к меньшей пары последовательно взятых полуволн колебаний относительно установившегося значения, т.е. можно записать: коэффициент демпфирования =F/A = A/B = B/C=….
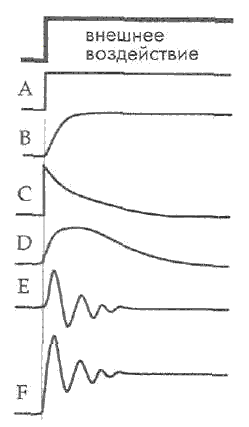
Возможные варианты выходных сигналов датчиков в ответ на ступенчатое внешнее воздействие.
Варианты выходных сигналов:
А - бесконечные верхняя и нижние частоты,
В- система первого порядка с ограниченной верхней частотой среза,
С - система первого порядка с ограниченной нижней частотой среза,
D - система первого порядка с ограниченными верхней и нижней частотами среза,
Е - система с узкой полосой частот (резонансная система),
F - широкополосная система с резонансом.
Классификация систем управления по информационным признакам.
Элементы пневмопривода промышленных роботов.
Пневмопривод применяется в основном в промышленных роботах с цикловым управлением. Функционально такой пневмопривод можно разделить на следующие узлы:
– блок подготовки рабочего тела (воздуха);
– блок распределения сжатого воздуха;
– блок исполнительных двигателей;
– система передачи сжатого воздуха между устройствами привода.
Блок подготовки воздуха является обязательным для промышленных роботов с пневмоприводом. Воздух осушают и очищают от пыли.
Блок распределения сжатого воздуха содержит устройства, с помощью которых по заданной программе можно открыть или закрыть доступ сжатого воздуха в рабочие полости исполнительных двигателей. В качестве распределителей служат устройства, где запорными устройствами служат золотники и клапаны. Обычно используют пневмораспределители с управлением от электромагнитов и командоаппаратов. Однако при определенных условиях (взрывоопасная среда, радиация) используются распределители с пневматическим управлением.
В качестве блока исполнительных двигателей используются цилиндры с прямолинейным или вращательным движением поршня одно- или двустороннего действия. На каждую степень подвижности предусматривается свой исполнительный двигатель (пневмоцилиндр), конструкция которого обеспечивает заданные перемещения, скорости и усилия.
Захватное устройство промышленных роботов также может иметь двигатель, который обеспечивает захват объекта манипулирования, его удержание при перемещении и освобождение после установки в заданной точке.
Рабочий цикл выполняется каждым двигателем в определенной последовательности в соответствии с требованиями технологического процесса и осуществляется по программе, выполняемой управляющим устройством робота, которое входит в состав СПУ.
В системе передачи сжатого воздуха между устройствами привода используются пневмопроводы различного сечения, рассчитываемого исходя из заданных условий работы.