

Элементарные динамические звенья
Динамика большинства функциональных элементов САУ независимо от исполнения может быть описана одинаковыми по форме дифференциальными уравнениями не более второго порядка. Такие элементы называют элементарными динамическими звеньями. Передаточная функция элементарного звена в общем виде задается отношением двух полиномов не более чем второй степени:
Известно также, что любой полином произвольного порядка можно разложить на простые сомножители не более, чем второго порядка. Так по теореме Виета модно записать
D(p) = aopn + a1pn - 1 + a2pn - 2 + ... + an = ao(p - p1)(p - p2)...(p - pn),
где p1, p2, ..., pn - корни полинома D(p). Аналогично
K(p) = bopm + b1pm - 1+ ... + bm = bo(p - p~1)(p - p~2)...(p - p~m),
где p~1, p~2, ..., p~m - корни полинома K(p). То есть

Корни любого полинома могут быть либо вещественными pi = ai , либо комплексными попарно сопряженными pi = ai ± ji . Любому вещественному корню при разложении полинома соответствует сомножитель (p - ai ). Любая пара комплексно сопряженных корней соответствует полиному второй степени, так как

То есть
Поэтому любую сложную передаточную функцию линеаризованной САУ можно представить как произведение передаточных функций элементарных звеньев. Каждому такому звену в реальной САУ, как правило, соответствует какой - то отдельный узел. Зная свойства отдельных звеньев можно судить о динамики САУ в целом.
В теории удобно ограничиться рассмотрением типовых звеньев, передаточные функции которых имеют числитель или знаменатель, равный единице, то
есть
W(p) =
![]() , W(p) =
, W(p) =
![]() , W(p) = 1/p, W(p) = p, W(p) = Tp + 1, W(p) = k. Из них могут
быть образованы все остальные звенья.
Звенья, у которых порядок полинома
числителя больше порядка полинома
знаменателя, технически нереализуемы.
, W(p) = 1/p, W(p) = p, W(p) = Tp + 1, W(p) = k. Из них могут
быть образованы все остальные звенья.
Звенья, у которых порядок полинома
числителя больше порядка полинома
знаменателя, технически нереализуемы.
Статические характеристики датчиков. Рассчитать статическую характеристику датчика температуры.
Если известны те или иные показатели элемента, то можно оценить свойство этого элемента. В автоматике и телемеханике свойства элементов оцениваются разными показателями, связанными входными и выходными величинами.
Функциональная зависимость выходной величины Y от входной V, выраженная математически или графически, называется статической характеристикой элемента Y=f(X).
Элементы, имеющие не зависящие от времени параметры и линейные статические характеристики, называются линейными, а имеющие нелинейные характеристики - нелинейными элементами.
По статической характеристике можно определить вид элемента (датчик, реле). Так, например, если статическая характеристика элемента непрерывна, т. е. величина Y находится в определенной непрерывной зависимости от величины X (рис. 1), то такой элемент называют источником первичной информации или датчиком.
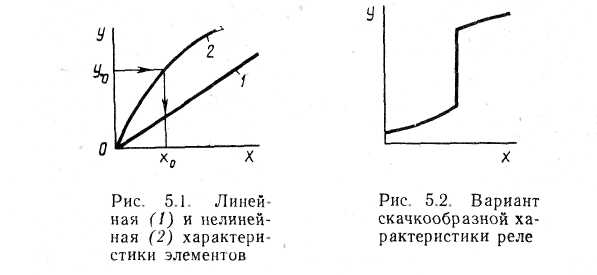
Если статическая характеристика элемента изменяется скачком, т. е. практически осуществляется включение или отключение при достижении входной величиной X определенных, заранее установленных значений, то такой элемент называется реле (рис. 2).
В зависимости от природы контролируемой входной величины X реле называются электрическими, тепловыми, оптическими. По наименованию входной величины X реле имеет уточняющий термин: реле уровня, реле скорости, реле тока, реле напряжения и т. д.
Как датчики, так и реле являются основными элементами автоматики. Они являются основными и обязательными элементами воспринимающих блоков (устройств). Их используют также и в промежуточных, и в исполнительных блоках автоматических систем. Элементы для конкретных автоматических систем выбирают по ряду показателей, их характеризующих, - коэффициенту передачи, порогу чувствительности, погрешности.
Коэффициент передачи элемента представляет собой отношение выходной величины элемента У к входной величине X, т. е. К = Y/X.
У элементов с линейной статической характеристикой коэффициент передачи - величина постоянная, а у элементов с нелинейной - переменная, зависящая от X. Если входная и выходная величины элемента имеют одинаковую физическую природу, т. е. одинаковые размерности, то коэффициент передачи размерности не имеет и его называют коэффициентом усиления. При разных размерностях входной и выходной величин коэффициент передачи элемента имеет размерность. Применительно к датчику коэффициент передачи называют также чувствительностью. Чем больше К, тем больше выходной сигнал элемента при том же изменении входной величины и тем меньше нужно будет усиливать выходной сигнал до требуемого значения.
Порог чувствительности - это наименьшее (по абсолютному значению) значение входного сигнала, способное вызвать изменение выходного сигнала. Интервал между значением входного сигнала, не оказывающего воздействия на значение выходного сигнала, и значением входного сигнала, оказывающего воздействие на значение выходного сигнала, называется зоной нечувствительности - ΔХн. Чем больше ΔХн тем хуже элемент. Например, у электродвигателя порог чувствительности равен напряжению трогания двигателя.
Погрешность элемента появляется из-за неточной тарировки или градуировки (вследствие разброса параметров) элементов в процессе их изготовления (в пределах установленных допусков). В результате погрешности происходит отклонение характеристики элемента от заданной «идеальной» статической характеристики. Погрешность элемента может также возникнуть в результате изменения его внутренних свойств (старение, износ) или внешних факторов (воздействие температуры, влажности, питающего напряжения).
Различают абсолютную, относительную и приведенную погрешности.
Под абсолютной погрешностью элемента понимают разность между полученным Уп и действительным У значениями выходной величины, т. е. Δ = УП -Y.
Действительное номинальное значение выходной величины - это идеальное значение выходной величины при отсутствии погрешности.
По мере уменьшения номинального значения выходной величины при неизменном значении абсолютной погрешности относительная погрешность увеличивается.
Погрешность, которая возникает при нормальных условиях эксплуатации, называется основной погрешностью. Условия эксплуатации элемента не всегда совпадают с нормальными, поэтому к основной погрешности элемента добавляется погрешность, называемая дополнительной.
Классификация систем управления по характеру изменения задающего устройства.
Электромеханические муфты. Классификация.
Муфты служат для соединения валов или валов с деталями, свободно вращающимися на них (зубчатыми колесами, шкивами и т.п.), с целью передачи вращения без изменения скорости. Известно, что большинство устройств, систем компонуют из отдельных узлов с входными и выходными валами. Такими узлами являются, например, привод в виде двигателя, передаточный и исполнительный механизмы. Кинематическая и силовая связь между этими узлами устройства осуществляется с помощью муфт.
Соединение валов является основным, но не единственным назначением муфт. Муфты применяют для включения и выключения исполнительного органа при непрерывно работающем двигателе, для предохранения рабочих органов от перегрузок и чрезмерно больших скоростей, для передачи движения между валами только в одном направлении, для остановки в качестве тормоза и других функций.
Глухие жесткие муфты используют при передаче движения между соосными валами, которые должны работать как единый вал. Компенсирующие подвижные муфты применяют при передаче движения между несоосными валами при наличии небольших радиальных, осевых, угловых или комбинированных смещений осей валов. Упругими муфтами пользуются для смягчения толчков, динамических нагрузок при передаче вращающегося момента между валами. Предохранительные муфты применяют во избежание поломок деталей механизма из-за перегрузок. Обгонные муфты используют для передачи движения только в одну сторону.
Муфты по управляемости передачей вращения между соединяемыми валами делят на три группы:
муфты постоянные, осуществляющие постоянное соединение валов, - глухие, компенсирующие, упругие;
муфты управляемые, обеспечивающие режим «включено-выключено» с помощью: дистанционного (электрического) управления - электромагнитные, магнитопорошковые (магнитожидкостные), пьезокристаллические; ручного (механического) управления - зубчатые, кулачковые, фрикционные;
муфты самоуправляемые, осуществляющие автоматическое разъединение или соединение валов: по величине передаваемого момента - предохранительные; по скорости вращения - центробежные; по направлению вращения - обгонные.