

17.2. Косинусний принцип керування
ФЗП з косинусним принципом керування (рис. 93) містить синхрозувальний трансформатор (СТр), генератор синусоїдної напруги (ГСН), компаратор (К) і формувач керувальних імпульсів (ФКІ).
Формування керувального імпульсу відбувається в момент рівності опорної напруги та напруги керування . Зміна кута керування відбувається за виразом а = arcos (Uk/Um) , що пояснюється часовими діаграмами (рис. 90, б). ГСН формує опорну напругу відповідно до напруги мережі, що накладає вимогу синусоїдальності до останньої. Якщо напругу мережі не можна відфільтрувати від гармонік і вона буде несинусоїдальною, то отримується похибка в роботі ФЗП, тому рекомендують в цьому випадку використовувати лінійний принцип керування.

Рис. 93. Структурна схема ФЗП косинусного принципу керування
17.3. Цифрові системи керування
На даному етапі розроблення СК широко використовуються цифрові ФЗП, які працюють за вертикальним принципом керування. В таких системах вся інформація подається числовим n-розрядним кодом. Структурну схему такої СК зображено на рис. 94, яка містить мультивібратор (MB), лічильник (Л), синхронізатор (С) і цифрову систему порівняння (ЦСП). Принцип роботи полягає в порівнянні опорного цифрового коду Кои, який є функцією часу, з цифровим керувальним кодом. Якщо ці коди однакові на виході ЦСП видається логічна одиниця, а момент часу відповідає куту керування. Синхронізатор використовується для налаштування лічильника при зміні полярності напруги живлення.
Необхідною умовою роботи такого ФЗП є те, щоб зміна величини опорного коду від максимального значення до мінімального відбувалась за половину періоду частоти мережі fм. Тому частоту імпульсів
мультивібратора вибирають за умовою fмв = 2"+1 * fм , де п — розрядність числового коду.
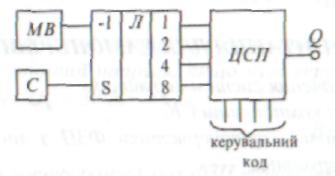
Рис. Структурна схема цифрового ФЗП вертикального типу
Приклади до розділу
Задача 17.1. Визначити значення кута керування ФЗП з лінійним принципом, якщо максимальна опорна напруга Um =42 В, а напруга керування UK = 8B.
Розв'язок: Відповідно до виразу для кута керування в ФЗП з лінійним принципом отримаємо
![]()
Задача 17.2. Визначити значення кута керування а ФЗП з косинусним принципом за умови, що амплітудне значення опорної напруги Um - 50 В, а напруга керування UK = 12 В.
Розв’язок: Для ФЗП з косинус ним принципом кут керування визначається за виразом
Відповідно
значення кута дорівнює
Задача 17.3. Для цифрового восьмиразрядного ФЗП визначити частоту імпульсів мультивібратора, якщо період напруги живлення Т = 0,02С.
Розв'язок: Значення частоти мультивібратора визначаємо за виразом fмв -2п+1 * fн. Для восьмиразрядного ФЗП п - 8, а частоту напруги мережі знаходимо як
fмв = 2 9 * 50 = 25600 Гц
Запитання для самоперевірки
Вкажіть призначення систем керування.
Назвіть основні компоненти СК.
3. Вкажіть основні характеристики ФЗП з лінійним і косинусном принципами керування.
За якими принципами реалізуються фазозсувальні пристрої?
У чому полягає лінійний принцип керування.
Поясніть косинусной принцип формування кута керування.
Яка особливість цифрових ФЗП?
Яка умова накладається на генератор імпульсів у цифровій системі керування?
9. Подайте корюшку характеристику широтно-імпульсного перетворювача.
ЗАДАЧІ НА САМОСТІЙНЕ ОПРАЦЮВАННЯ
17.1с. Для ФЗП з лінійним принципом керування визначити значення напруги керування, щоб забезпечити кут керування а = 450 при максимальному значенні опорної напруги Um = 50 В.
(Відповідь: 25 В).
17.2с. Обчислити максимальне значення опорної напруги ФЗП з лінійним принципом керування, щоб забезпечити кут керування а = 300, якщо напруга керування UKep =10 5.
(Відповідь: 15В).
17.3с. Для ФЗП з лінійним принципом керування обчислити значення куша керування, якщо максимальне значення опорної напруги Um = 100 В, а напруга керування С/ = 25 В.
(Відповідь: а = 67,5").
17.4с. Обчислити кут керування ФЗП, з косинусним принципом керування, якщо максимальне значення опорної напруги U "- 60 В.
(Відповідь: 6(f).
17.5с. Визначити необхідне значення напруги керування ФЗП, щоб забезпечити кут керування ФЗП з косинусним принципом керування а = 25", якщо максимальна опорна напруга Um = 80 В.
(Відповідь: 72,5 В).
17.6с. Для ФЗП з косинусним принципом керування обчислити максимальне значення опорної напруги, якщо кут керування а = 420, а напруга керування UK =30 В.
(Відповідь: 40,37 В).
17.7с. Дія цифрового чотирирозрядного ФЗП визначити частоту імпульсів мультивібратора, якщо частота напруги живлення f= 100 Гц.
(Відповідь: 3200 Гц).
17.8с. Дія цифрового шістнадцятирозрядного ФЗП. частота напруги живлення якого/- 50 Гц, обчислити період імпульсів мультивібратора.
(Відповідь: 0,152 мкс).
17.9с. Визначити частоту напруги живлення восьмиразрядного ФЗП за умови, що період імпульсів дорівнюватиме Т = 5*10-5с
(Відповідь: 39 Гц).
17.10с. Визначити розрядність цифрового ФЗП, частота напруги .живлення якого f = 50 Гц, а частота імпульсів мультивібратора fмв= 25600 Гц.
(Відповідь: 8).
РОЗДІЛ 18