

16.2. Формування команд
Робота МП автоматично керується машинним циклом. Машинний цикл складається з двох підциклів — вибірки і виконання. Поточна команда вибирається з пристрою постійної пам'яті (ППП) чи пристрою оперативної пам'яті (ПОП) за адресою, вказаною у регістрі адреси, і через шину даних (ШД) заноситься в регістр команд. Перший байт команди, що поступає в регістр команд, містить код операції, згідно з яким в пристрої керування формуються відповідні сигнали, що пересилаються шиною керування (ПІК) і забезпечують виконання команди. Команда може бути одно-, дво- чи трибайтовою. Адресу поточного байта команди вказує лічильник команд, який після вибору кожного наступного байта за допомогою операцій інкременту-декременту збільшує вміст лічильника команд на одиницю.
Часова послідовність тактів, необхідна для вибору команди з пам'яті і її виконання, називається циклом команди. Такт — це найменший проміжок часу, необхідний для виконання однієї елементарної дії в МП (зсув регістра, запис в регістр, перенесення з одного регістра в інший тощо). Цикл команди складається з машинних циклів, які тривають протягом часу вибору з пам'яті одного байта команди й містять три — п'ять тактів (рис. 88).
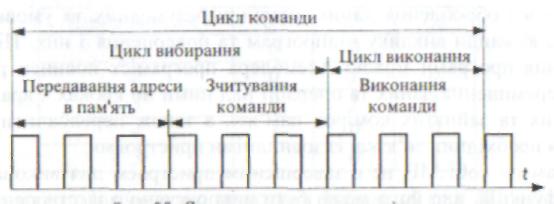
Рис. 88. Структура циклу команди
На початку кожного машинного циклу МП видає на ШД інформацію у восьмирозрядному коді, яка характеризує стан МП. Ця інформація знаходиться на ШД протягом дії сигналу синхронізації, який завжди подається в першому такті будь-якого машинного циклу.
Команда МП — це таке двійкове слово, яке, будучи прочитане МП, змушує його виконувати певні дії. Інші, відмінні від команд, двійкові слова подібних дій в МП не зумовлюють. Довжина команди, як двійкового слова, збігається з довжиною слова даних. Так, довжина слова команди 8-розрядного МП дорівнює 8 біт, а 16-ти розрядного МИ — 16 біт. Таке представлення зменшує ймовірність помилки при складанні програми. Будь-яка команда складається з двох частин: коду операції і адреси.
Команда повинна містити інформацію двох видів:
повідомляти МП, що робити (виконувати операції додавання, очищення, пересилання, зсуву тощо);
вказувати адресу, тобто місцезнаходження в пам'яті оброблюваних даних.
Отже, будь-яка команда мікропроцесора — це багаторозрядне двійкове число, запис якого громіздкий й важко запам'ятовується. За допомогою шістнадцяткової системи числення його можна спростити, проте й ця форма незручна, оскільки не виражає змісту команди. Дану проблему вирішують шляхом застосування мнемонічних позначень — скороченого запису назв команд, тобто використовується спеціальна мова Асемблер. Для порівняння подаємо приклад команди «завантажити до акумулятора МП» у двійковому коді (ООП 1010), шістнадцятковому коді (3А) та мнемокоді (LDA — Load to accumulator). Кожен МП має свою систему команд, яка визначається його структурою. Але всі МП мають сегмент функціонально однакових команд, а саме, команди пересилання даних, команди арифметичного та логічного оброблення даних, команди безумовних та умовних переходів, команди виклику підпрограм та повернення з них. Під чає написання програми мовою Асемблера програміст повинен розписати всі переміщення даних та операції над ними по кроках з врахуванням вільних та зайнятих комірок пам'яті, а також передбачити встановлення необхідних зв'язків із зовнішніми пристроями.
Сам по собі МИ не є завершеним пристроєм для виконання певних функцій, але його може бути використано для створення мікропроцесорних систем відповідного призначення. Наприклад, широкого застосування набули мікроконтролери — мікро-ЕОМ для реалізації локальних систем керування технологічними процесами та електронними пристроями.