

1.2 Типовые звенья систем автоматического регулирования
Понятие типового динамического звена
Каждая САР может быть разделена на более мелкие элементы, переходные процессы в которых описываются определёнными дифференциальными уравнениями и, как итог, имеют определенные передаточные функции. Такие элементы принято называть динамическими звеньями.
Д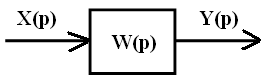 инамическим
звеном может быть как элемент, так и их
группа, и вся система вообще. На структурных
схемах САР
динамические звенья принято показывать
прямоугольником, внутри которого
записывается передаточная функция
W(p), а направление прохождения информации
показывается стрелками.
инамическим
звеном может быть как элемент, так и их
группа, и вся система вообще. На структурных
схемах САР
динамические звенья принято показывать
прямоугольником, внутри которого
записывается передаточная функция
W(p), а направление прохождения информации
показывается стрелками.
Рисунок 1.3 - Условно-графическое обозначение динамических звеньев на структурных схемах
Можно выделить ряд элементарных динамических звеньев, посредством которых может быть составлена любая САР. Такие звенья принято называть типовыми динамическими звеньями. Анализ динамических свойств САР через свойства составляющих их типовых динамических звеньев позволил значительно упростить рассмотрение процессов в регуляторах. При этом физическая природа регулятора не имеет значения. Можно выделить в качестве типовых динамических следующие звенья: пропорциональное, интегрирующее, дифференцирующее, апериодическое первого и второго порядка, звено с опозданием и другие.
Пропорциональное звено
Пропорциональным (безинерционным, усиляющим) называют звено, у которого выходная величина y в каждый момент времени пропорционален входной величине х.
y=k*x , (1.7)
где k - коэффициент пропорциональности.
Передаточная функция пропорционального звена имеет вид
W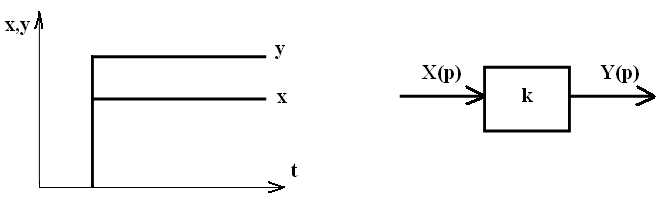 (p)=k
. (1.8)
(p)=k
. (1.8)
Рисунок 1.4 - Характеристики и УГО пропорционального звена
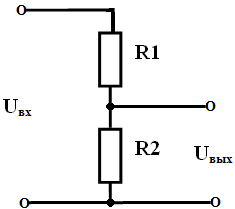
Рисунок 1.5 - Пример пропорционального звена, где y<x (Uвых<Uвх).
Интегрирующее звено
Интегрирующим называется звено, в котором выходные величины пропорциональны интегралу во времени от входной величины.
![]()
(1.9)
Передаточная функция интегрирующего звена имеет вид
W(p)=k/p. (1.10)
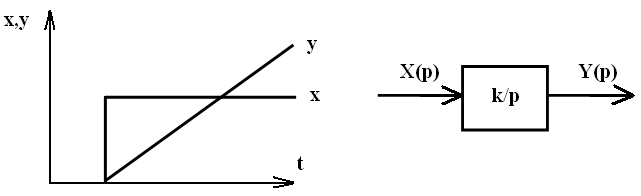
Рисунок 1.6 - Характеристики и УГО интегрирующего звена
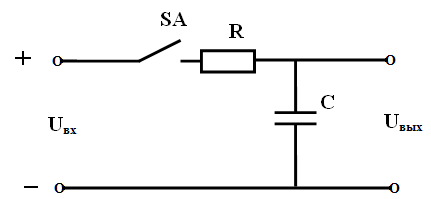
Рисунок 1.7 - Пример интегрирующего звена (когда переходный режим далёк от установившегося)
Дифференцирующее звено
Дифференцирующим называется звено, в котором выходные величины пропорциональны производной по времени от входной величины. По другому говоря, выходная величина пропорционально скорости изменения входной величины. Отличают идеальные и реальные дифференцирующиеся звенья. Уравнение идеального дифференцирующего звена имеет вид
![]()
(1.11)
а передаточная функция для него
W(p)=kp . (1.12)
У идеального дифференцирующего звена скачкообразное изменение входного сигнала должно вызывать мгновенное изменение выходной величины от ноля к бесконечности, а потом ее резкое падение к нолю. Реальное дифференцирующее звено имеет уравнение
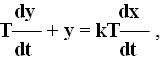
(1.13)
где Т - постоянная времени.
Передаточная функция реального дифференцирующего звена имеет вид
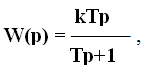
(1.14)
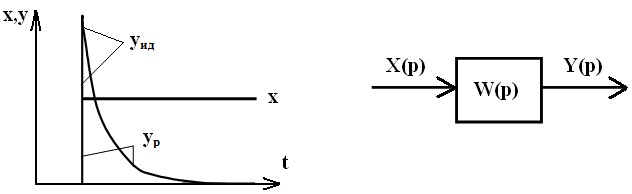
Рисунок 1.8 - Характеристики и УГО дифференцирующего звена: yид и yр - выходные параметры идеального и реального дифференцирующих звеньев
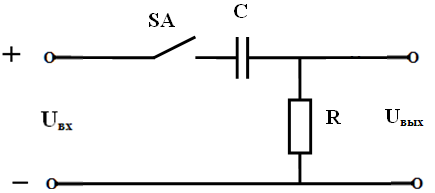
Рисунок 1.9 - Пример реального дифференцирующего звена
Апериодическое звено первого порядка
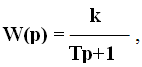
Апериодическим (инерционным) звеном первого порядка называют звено, в котором при подаче на вход скачкообразного сигнала исходящая величина апериодически (по экспоненте) приближается к новому установившемуся значению. Уравнение такого звена имеет вид
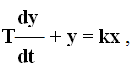
(1.15)
а передаточная функция равна
(1.16)
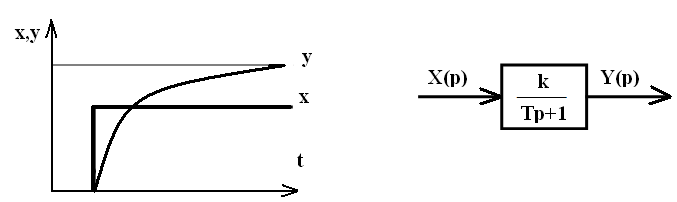
Рисунок 1.10 - Характеристики и УГО апериодического звена первого порядка
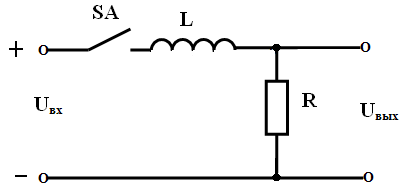
Рисунок 1.11 - Пример апериодического звена первого порядка
Апериодическое звено второго порядка
Уравнение апериодического звена второго порядка может быть записано следующим образом
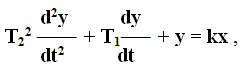
(1.17)
где T1 и T2 - постоянные времени.
Передаточная функция такого звена имеет вид
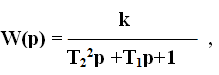
(1.18)
Р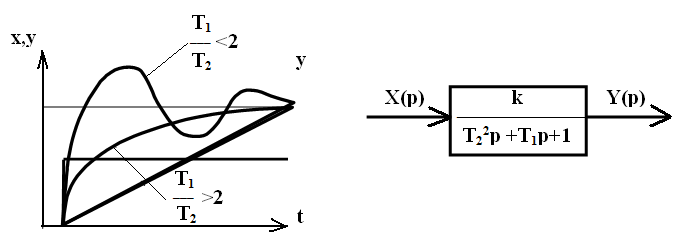 исунок
1.12 - Характеристики и УГО апериодического
звена второго порядка
исунок
1.12 - Характеристики и УГО апериодического
звена второго порядка
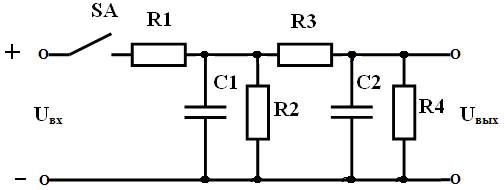
Рисунок 1.13 - Пример апериодического звена второго порядка
Звено с опозданием
В звене с опозданием выходная величина повторяет входную, но с определенным опозданием по времени.
y = x(t — ) , (1.19)
Передаточная функция имеет вид
W(p)=e-p , (1.20)
Примером звена с опозданием может быть реле времени.
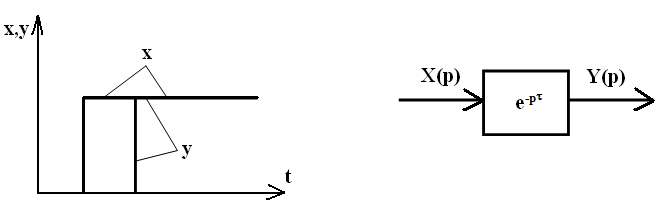
Рисунок 1.14 - Характеристики и УГО звена с опозданием
Обозначение типовых динамических звеньев посредством характеристик
Часто передаточные функции, особенно когда они большие, неудобно записывать в прямоугольниках. Чтобы этого избежать, а также для увеличения наглядности внутри четырёхугольника указывают вместо передаточной функции характеристику звена. При этом по горизонтали указывают входную, а по вертикали - выходную величины.
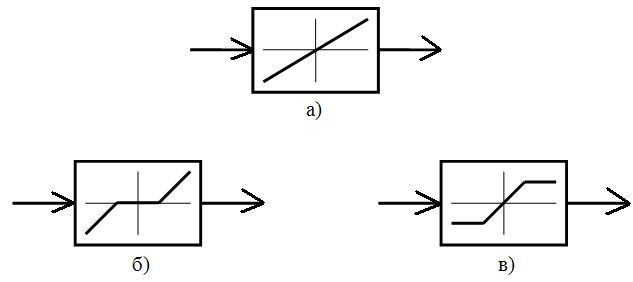
Рисунок 1.15 Примеры типовых динамических звеньев: а) пропорционального, б) с зоной нечувствительности, в) с ограничением выходного сигнала.
Сложение и упрощение структурных схем САР
Любимую САР можно представить в виде структурной схемы, которая включает в себя типовые динамические звенья. Структурная схема любой системы может быть составлена на основании ее функциональной или принципиальной схемы. Для нахождения передаточной функции САР необходимо совершить эквилентирование ее структурной схемы. При этом отличают последовательное, параллельное и встречно-параллельное соединение звеньев.
При последовательном соединении звеньев выходная величина предыдущего блока является входной величиной для следующего. При этом
W(p)=W1(p)W2(p) ... Wn(p) . (1.21)
При параллельном соединении входная величина всех звеньев общая, а выходные величины суммируются. Таким образом
W(p)=W1(p) + W2(p) + ... + Wn(p) . (1.22)
При встречно-параллельном соединении звеньев выходная величина первого звена подается на вход второго, а его выходная величина суммируется с общей входной величиной и подается на вход первого звена. Эквивалентная передаточная функция в этом случае находится следующим образом
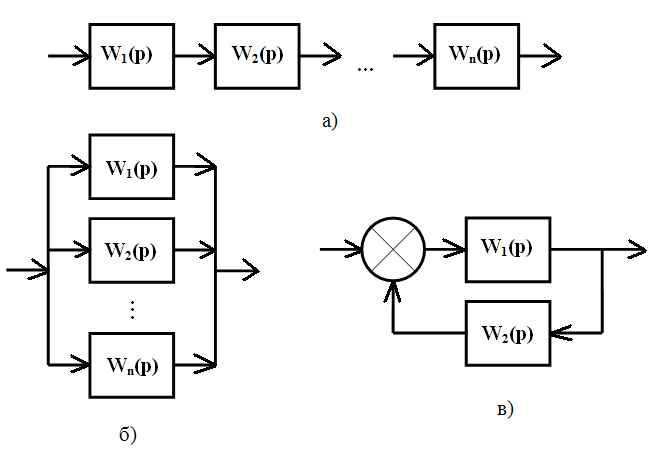
Рисунок 1.16 - Соединение звеньев: а) последовательное, б) параллельное, в) встречно - параллельное.
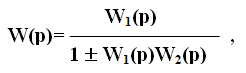
(1.23)
где знак "+" соответствует отрицательной обратной связи, а "—" - положительной.
Для преобразования схем пользуются также правилами, которые приведены на рисунке 1.17.
Задача 1. Эквивалентировать схему, которая приведена на рисунке 1.18 и найти W(p). W1(p)=2p; W2(p)=1/(p+1); W3(p)=5p+5; W4(p)=0,2; W5(p)=0,4p. Обратная связь - отрицательная.
Решение. От схемы, которая приведена на рисунке 1.18 перейдём к схеме, которая показана на рисунке 1.19а. При этом W6(p) находится по (1.22), потому что W2(p) и W3(p) включены между собой параллельно.

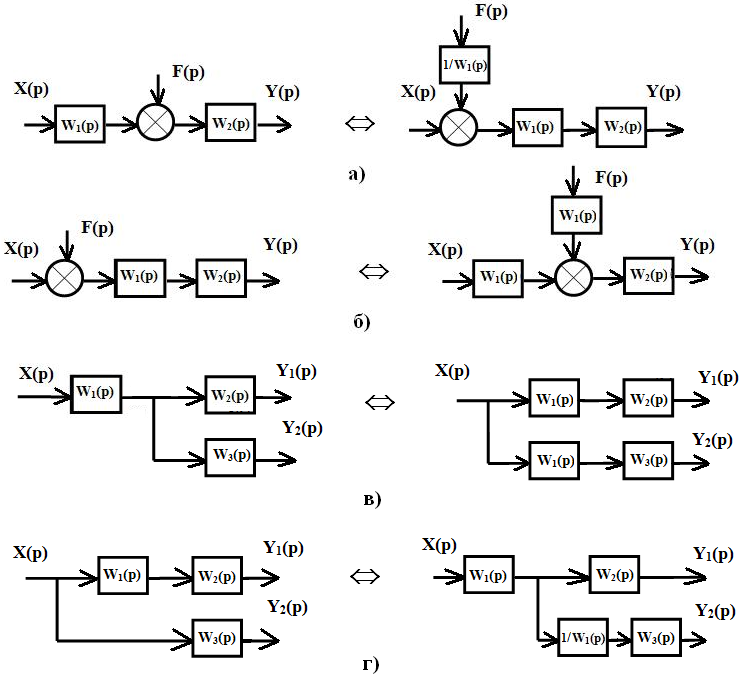
Рисунок 1.17 - Преобразования структурных схем
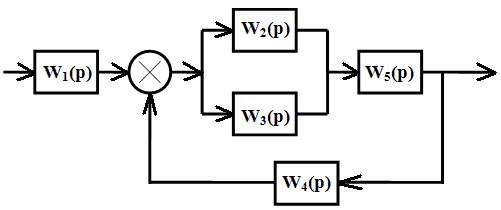
Рисунок 1.18
W6(p) и W5(p) включены последовательно, поэтому они эквивалентируются по (1.21). В итоге получим схему, которая приведена на рисунке 1.19б.

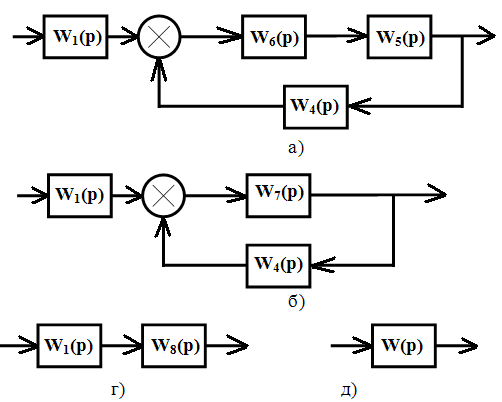
Рисунок 1.19 - Эквивалентирование схемы, которая приведена на рисунке 1.18.
W7(p) и W4(p) эквивалентируются по (1.23). При этом в знаменателе знак "+" принимается потому, что обратная связь в схеме отрицательная. Получаем схему 1.19в.

Итоговая передаточная функция (рисунок 1.19г) находится по (1.21).
