

Содержание
Основные понятия и значения 4
Системы автоматического управления 4
Классификация систем автоматического управления 4
Системы автоматического регулирования 5
Системы автоматического контроля 5
Установившийся режим и переходные процессы в САР 5
Операторное вычисление 6
1.2 Типовые звенья систем автоматического регулирования 7
Понятие типового динамического звена 7
Пропорциональное звено 7
Интегрирующее звено 8
Дифференцирующее звено 9
Апериодическое звено первого порядка 10
Апериодическое звено второго порядка 10
Звено с опозданием 11
Обозначение типовых динамических звеньев посредством характеристик 12
Сложение и упрощение структурных схем САР 12
1.3 Характеристики и устойчивость САР 16
Статичные и динамические характеристики 16
Устойчивость САР и ее определение 18
Критерий устойчивости Рауса-Гурвица 19
Критерий устойчивости Михайлова 20
Критерий устойчивости Найквиста 21
Запас устойчивости САР 25
Определение устойчивости и запаса устойчивости САР по модулю
и по фазе по логарифмическим частотным характеристикам (ЛАЧХ) 25
1.4 Качественные показатели переходных процессов САР 26
Понятия качества и точности управления 26
Статичные и астатические системы 26
Показатели качества переходного процесса 26
Методы исследования качества регулирования 27
1.5 Корректирующие приспособления 28
Последовательные корректирующие приспособления 28
Параллельные корректирующие приспособления 28
Корректирующие приспособления по возмущению 29
Определение корректирующих звеньев 29
Понятие синтеза САР 30
Литература 31
1 Основные понятия и значения
Автоматические системы, которые используются при автоматизации производственных процессов можно разделить на системы автоматического управления, системы автоматического регулирования, системы автоматического контроля, автоматической защиты (предохранения) и т. д. Автоматические системы могут быть комбинированными. То есть, представлять собой совокупность нескольких систем.
Системы автоматического управления
Управление, которое свершается без участия человека, называется автоматическим. Техническое приспособление, посредством которого свершается автоматическое управление объектов, называется управляющим приспособлением. Совокупность управляющего приспособления и объекта управления образуют систему автоматического управления (САУ).
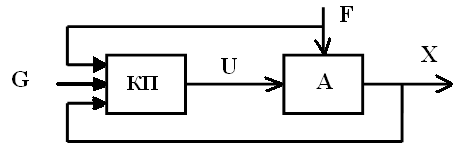
Рисунок 1.1 - Структурная схема САУ
Задающий сигнал G, который удерживает информацию о требуемом значении Х, подаётся на вход управляющего приспособления КП. Туда же подается информация Х о текущем состоянии объекта А и возмущении F. Управляющее приспособление обрабатывает эту информацию по заранее созданному (заданному) алгоритму. В итоге на выходе КП возникает управляющее воздействие U. Управляющее приспособление включает в себя чувствительные, вычислительные и исполнительные приспособления. Чувствительные приспособления служат для измерения переменных Х, G, F. Вычислительное приспособление реализует алгоритм управляющего приспособления, соответствующим образом перерабатывая входную информацию, которая поступает от чувствительных приспособлений. Исполнительное приспособление предназначено для непосредственного управления объектов, то есть смены его состояния в соответствии с сигналами, которые выдаются вычислительным приспособлением.
Классификация систем автоматического управления
В зависимости от вида используемого управляющего приспособления информации, разделяют разомкнутые и замкнутые САУ.
В разомкнутых САУ выходная величина Х управляемого объекта А (рисунок 1.1) не измеряется. То есть отсутствует контроль за состоянием объекта (отсутствует обратная связь). Управление в таких САУ производится или по задающему сигналу G, или по возмущению F или всё это происходит одновременно.
В замкнутых САУ на вход управляемого приспособления подаются задаваемое воздействие G и выходная величина Х. В такой САУ управляющее приспособление добивается ликвидировать все отклонения Х от его заданного сигнала G значимости, независимо от условий, которые их вызвали. Замкнутые системы автоматического управления могут обеспечить принципиально неограниченную точность управления и представляют основной тип САУ.
В зависимости от количества выходных координат Х объекта регулирования А, различают одномерные и многомерные системы.
Многомерные САУ в свою очередь делятся на системы несвязанного и связанного управления. Системы несвязанного управления имеют несколько управляющих приспособлений, каждая из которых производит управление своей выходной координаты объекта. В системах связанного управления отдельные управляющие приспособления связаны между собой внешне.
В зависимости от состояния параметров во времени различают стационарные и нестационарные САУ.
Стационарной называется САУ, все параметры которой не изменяются во времени. Нестационарные САУ - это системы автоматического управления с изменёнными во времени параметрами.
В зависимости от действия составляющих систему звеньев САУ делятся на неразрывного и дискретного действия.
В зависимости от реакции САУ на изменение внешних условий они делятся на адаптивные (самоприспосабливающиеся) и неадаптивные. Адаптивные системы имеют способность приспосабливаются к смене внешних условий работы, а также улучшать свою работу при накапливании опыта. Неадаптивные (обычные) системы такой возможности не имеют.
Системы автоматического регулирования
Системой автоматического регулирования (САР) называется САУ, задачей которой является поддержание величины Х объекта регулирования А на заданном уровне G, то есть, поддержание тождества Х=G.
В зависимости от характера задающего воздействия САР делятся на три вида:
- систему стабилизации,
- систему программного управления,
- следящую систему.
В системах стабилизации задающий сигнал постоянен, в системах программного управления он изменяется по заранее заданному закону. В следящих системах он также изменяется, но закон изменения заранее неизвестный. В этом случае задающий сигнал поступает на систему снаружи и задачей системы является обеспечение слежения выходной величины параметров за изменением задающего сигнала таким образом, чтобы всегда исполнялось равенство Х=G.
Управляющее приспособление в САР называется регулятором, а выходная величина - регулируемой. Процесс регулирования может быть организован по отклонению (по Х), по возмущению (по F) и комбинированной (по Х и F одновременно).
Системы автоматического контроля
Системы автоматического контроля предназначены для контроля параметров производственного процесса, сигнализации о нарушении его нормального хода, а также для учёта количества производимого результата. Системы автоматического контроля не вмешиваются в технологический процесс и являются разомкнутыми.

Рисунок 1.2 - Структурная схема системы автоматического контроля
В системах автоматического контроля смена контролируемого параметра Х объекта А воспринимается вычислительным элементом (датчиком) АЭ, который превращает физический сигнал Х в более удобный Y, который воздействует на исполнительный элемент ВЭ.
Установившийся режим и переходные процессы в САР
Установившийся режим системы автоматического регулирования - это такой ее режим, при котором входные и выходные параметры системы остаются постоянными во времени. В итоге постоянного воздействия на САР, неразрывно случайным образом изменяющихся факторов системы автоматического регулирования, как обычно работают в переходных режимах.
Переходным процессом САР называется изменение во времени ее параметров из момента появления управляющего или разрушающего воздействия на систему, которая находилась в установившимся режиме, к моменту установления у неё опять установившегося состояния. Характер переходного процесса зависит от динамических свойств САР, которые определяются ее внутренними физическими и конструктивными особенностями.
В общем виде дифференциальное уравнение, которое описывает переходные процессы в элементе САР записывается в виде
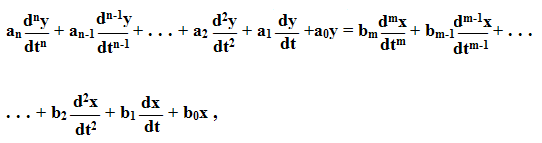
(1.1)

где an ... a0, bm ... b0 - постоянные коэффициенты, которые определяются конструктивными особенностями и параметрами настройки системы.
x,y - входной и выходной параметры системы, которые указывают отклонение от состояния равновесия;
Переходные процессы во всей системе автоматического регулирования описываются системой дифференциальных уравнений, подобными (1.1).
Операторное вычисление
Аналитическое решение уравнения (1.1) и тем более системы таких уравнений очень сложное. Его можно значительно упростить посредством операторного вычисления. При этом вводятся функции Y(p) и X(p) комплексной переменной p=+jw.
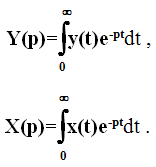
(1.2)
(1.3)
Функции x(t) и y(t) принято называть оригиналом, а X(p) i Y(p) - их отображениями. Преобразование оригинала в отображение называется преобразованием Лапласса, а наоборот - обратным преобразованием Лапласса. Существуют специальные таблицы, которые позволяют производить эти преобразования.
Таким образом, дифференциальное уравнение (1.1) посредством преобразования Лапласса может быть записано в операторной форме следующим образом

(1.4)

В итоге операторное вычисление позволяет свести систему дифференциальных уравнений к системе алгебраических уравнений. Остальные решаются достаточно просто. Имея решение системы алгебраических, можно найти посредством обратного преобразования Лапласса требуемый оригинал.
Если в правой части (1.4) вынести за скобки Y(p), а в левой X(p) и найти их отношение, то получим
 (1.5)
(1.5)
Функцию W(p) принято называть передаточной функцией. Она является основным показателем динамических свойств систем и их элементов. Из (1.5) следует, что
Y(p)=W(p)*X(p). (1.6)