

11) Механическая работа, энергия и мощность.
Работой называется интеграл скалярного произведения вектора силы F на вектор элементарного приращения перемещения точки ее приложения dS
![]()
Энергией называется способность системы совершать работу или запас работы. В механических системах различают кинетическую и потенциальную энергии.
Чтобы сообщить системе ускорение и заставить ее двигаться с требуемой скоростью, нужно совершить работу. Эта работа запасается системой в виде энергии движения или кинетической энергии. Для механической системы, в которой r звеньев вращаются, p совершают поступательное движение и k - плоское, кинетическая энергия равна:
|
Деформация звена системы требует совершения работы, которая запасается системой в виде потенциальной энергии. Для системы, в которой a звеньев подвергаются скручиванию и s звеньев - линейной деформации, потенциальная энергия деформации равна:
|
Мощностью называется производная от работы по времени. Средняя мощность - отношение совершенной работы ко времени ее выполнения. Рассмотрим механическую систему, на кот-ую воздействуют m моментов и f сил. Элементарное приращение энергии системы
|
ее мощность
|
Преобразование энергии в механизмах. Рассмотрим, как преобразуется поток механической энергии в идеальном механизме с жесткими звеньями. При этом входная мощность равна выходной Pвх = Pвых.
1. Механизм, преобразующий вращательное движение во вращательное.
|
так как
|
2. Механизм, преобразующий вращательное движение в поступательное.
|
так как
|
12). Эвольвентное зацепление и его свойства
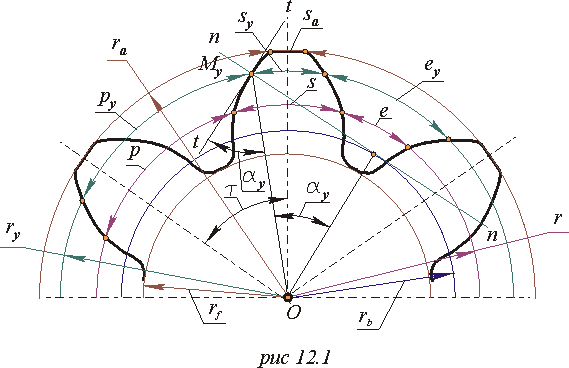
В зубчатой передаче контактирующие элементы двух профилей выполняются по эвольвентам окружности и образуют, так называемое эвольвентное зацепление. Это зацепление обладает рядом полезных свойств, которые и определяют широкое распространение эвольвентных зубчатых передач в современном машиностроении. Геометрические параметры эвольвентного зубчатого колеса Эвольвентным зубчатым колесом называют звено зубчатого механизма, снабженное замкнутой системой зубьев. Основные геометрические параметры эвольвентного зубчатого колеса показаны на рис. В инженерных расчетах для определения геометрических размеров зубчатых колес используется некоторый параметр, называемый модулем зацепления.
|
Модулем
зацепления
называется линейная величина в π раз
меньшая окружного шага или отношение
шага по любой концентрической окружности
зубчатого колеса к π:
![]() .
.
Стандартный модуль определяется по окружности, называемой делительной. Делительной называется такая окружность зубчатого колеса, на которой модуль и шаг принимают стандартное значение. Окружность вершин (ra) - очерчивает вершины зубьев. Окружность впадин (rf) - очерчивает ножки зубьев. Основная окружноcть (rb) – это окружность, по которой перекатывается нормаль . Окружным шагом или шагом называется расстояние по дуге окружности между одноименными точками профилей соседних зубьев. Угловой шаг τ - центральный угол, соответствующий дуге p - окружному шагу. Углом профиля α называется острый угол между касательной к профилю в данной точке и радиусом - вектором, проведенным в данную точку из центра колеса. Шаг колеса делится на толщину зуба sy и ширину впадины ey. Толщина зуба sy - расстояние по дуге окружности ry между разноименными точками профилей зуба. Ширина впадины ey - расстояние по дуге окружности ry между разноименными точками профилей соседних зубьев. В зависимости от соотношения между толщиной зуба и шириной впадины на делительной окружности зубчатые колеса делятся на: нулевые s = e; положительные s > e; отрицательные s < e.
13). Классификация сил, действующих в механизмах. Все силы, действующие в механизмах, условно подразделяются на: 1. внешние, действующие на исследуемую систему со стороны внешних систем и совершающие работу над системой. Эти силы в свою очередь подразделяются на: движущие, работа которых положительна; сопротивления, работа которых отрицательна. 2. внутренние, действующие между звеньями механической системы. 3. расчетные (теоретические) - силы, которые не существуют в реальности, а только используются в различных расчетах с целью их упрощения: 4. силы инерции - предложены Д'Аламбером для силового расчета подвижных механических систем. 5. приведенные силы – силы, совершающие работу по обобщенной координате равную работе соответствующей реальной силы на эквивалентном перемещении точки ее приложения.
Силы в кинематических парах без учета силы трения
Сила, как векторная величина харак-ся относительно звеньев механизма тремя параметрами: коор-ми точки приложения, величиной и направлением. Низшие кинематические пары. Вращательная пара. Во вращательной паре 5 класса результирующая сила реакции R проходит через центр шарнира 0. Можно записать, что R0 = R12 =-R21.
Поступательная пара. В поступательной паре реакция перпендикулярна к оси движения Х – Х этой пары. Известно ее направление, но не известны координата точки приложения и величина. Высшие кинематические пары. В высшей кинематической паре реакция направлена по нормали n-n к поверхности в точке соприкосновения звеньев. Таким образом, для определения реакции в каждой из низших пар 5 класса необходимо найти по две неизвестных, а для определения реакции в высшей паре 4 класса – только одну неизвестную величину.
14), 18). При проектировании зубчатых механизмов многих машин и приборов возникает необходимость обеспечить передачу вращения с большим передаточным отношением или при значительных межосевых расстояниях. В таких случаях применяют многозвенные зубчатые механизмы – либо редукторы, снижающие скорость вращения выходного вала по сравнению со скоростью входного звена, либо мультипликаторы, повышающие ее.
Многозвенные зубчатые механизмы подразделяются на два вида: 1) механизмы с неподвижными осями всех колес; 2) механизмы, в которых оси отдельных колес перемещаются относительно стойки.
Механизмы с неподвижными осями зубчатых колес имеют число степеней свобод, равное единице, благодаря чему передаточное отношение постоянно.
Общее передаточное отношение многозвенного зубчатого механизма равно произведению передаточных отношений отдельных ступеней:
![]()
Общее передаточное отношение рядового зубчатого механизма постоянно и равно обратному отношению чисел зубьев или радиусов крайних колес:
![]() Знак
передаточного отношения определяется
множителем
Знак
передаточного отношения определяется
множителем
![]() ,
где
,
где
![]() -
число передач внешнего зацепления.
-
число передач внешнего зацепления.
Ступенчатые зубчатые механизмы представляют собой последовательное соединение блочных или одиночных зубчатых колес. В общем случае при j колесах и t внешних зацеплениях полное передаточное отношение ступенчатой передачи
![]() ,
,
т.е. равно отношению произведения чисел зубьев ведомых колес к произведению ведущих колес.