

41). Циклограмма работы кулачкового механизма
Большинство кулачковых механизмов относится к цикловым механизмам с периодом цикла равным 2. В цикле движения толкателя в общем случае можно выделить четыре фазы: удаления из самого близкого в самое дальнее положение, дальнего стояния, возвращения из самого дальнего положения в самое близкое и ближнего стояния. В соответствии с этим, углы поворота кулачка или фазовые углы делятся на:
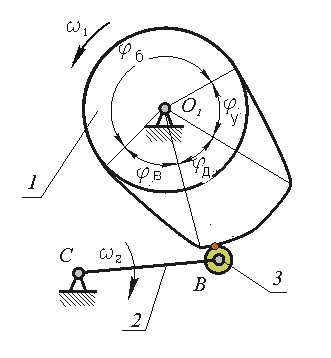
угол удаления φy; угол дальнего стояния φд ; угол возвращения φв;; угол ближнего стояния φб.. Сумму φу + φд + φв называют рабочим углом и обозначают φр. Следовательно, φу + φд + φв = φр.
Основные параметры кулачкового механизма
Кулачок механизма характеризуется двумя профилями: центровым и конструктивным. Под конструктивным понимается наружный рабочий профиль кулачка. Теоретическим или центровым называется профиль, который в системе координат кулачка описывает центр ролика при движении ролика по конструктивному профилю кулачка. Фазовым называется угол поворота кулачка. Профильным углом δi называется угловая координата текущей рабочей точки теоретического профиля, соответствующая текущему фазовому углу φi. В общем случае фазовый угол не равен профильному φi # δi. Основные параметры плоских кулачковых: текущие значения перемещения центров роликов, начальная угловая координата коромысла, текущее угловое перемещение коромысла, максимальное перемещение центра ролика, радиус начальной шайбы центрового профиля кулачка, радиус начальной шайбы конструктивного профиля кулачка, радиус ролика, текущее значение угла давления, межосевое расстояние, внеосность (эксцентриситет).
Типовые законы движения толкателя. Типовые законы движения делятся на законы с жесткими и мягкими ударами и законы безударные. С точки зрения динамических нагрузок, желательны безударные законы. Однако кулачки с такими законами движения технологически более сложны, так как требуют более точного и сложного оборудования, поэтому их изготовление существенно дороже. Законы с жесткими ударами имеют весьма ограниченное применение и используются в неответственных механизмах при низких скоростях движения и невысокой долговечности. Кулачки с безударными законами целесообразно применять в механизмах с высокими скоростями движения при жестких требованиях к точности и долговечности. Наибольшее распространение получили законы движения с мягкими ударами, с помощью которых можно обеспечить рациональное сочетание стоимости изготовления и эксплуатационных характеристик механизма.
42). Цель и задачи метрического синтеза механизмов.
Цель метрического синтеза механизма - определение размеров механизма и положений его входного звена наилучшим образом удовлетворяющих заданным условиям и обеспечивающих наилучшее сочетание качественных показателей. Условия проворачиваемости звеньев механизма. Часто по условиям работы требуется, чтобы входное и выходное звенья могли в процессе движения поворачиваться на угол более 360 градусов. Для обеспечения этого необходимо выполнить некоторые условия, которые накладываются на соотношение длин звеньев механизма. Для четырехшарнирного механизма эти соотношения сформулированы в правиле или теореме Грасгофа: Если сумма длин наибольшего и наименьшего звеньев меньше суммы двух остальных и стойкой является наименьшее звено, то механизм - двухкривошипный. Если неравенство выполняется, но стойкой является звено, соединенное с наименьшим, то механизм - кривошипно-коромысловый. Во всех остальных случаях механизм - двухкоромысловый.
Математически это можно записать так:
при L1 > L2 > L3 > L4 , где Li присваивается значение длины звена, удовлетворяющей этому неравенству,
если L1 + L4 < L2 + L3 и L1 = l0 , то механизм двухкривошипный;
если L1 + L4 < L2 + L3 и L1 = l1 или L1 = l3 ,то механизм кривошипно-коромысловый; иначе механизм двухкоромысловый.
Для кривошипно-ползунного механизма условие существования кривошипа
![]()
Если условие выполняется - механизм кривошипно-ползунный, нет - коромыслово-ползунный.