

3.2.1. Назначение выводов микропроцессора
Назначение выводов БИС (рис.3.3) зависит от режима работы МП. Восемь выводов имеет двойное обозначение, причем обозначения в скобках соответствуют максимальному режиму. Рассмотрим подробнее функциональное назначение сигналов МП и особенности их использования сначала в минимальном режиме.
AD15—AD0 — мультиплексная (совмещенная) двунаправленная шина адреса/данных, по которой с разделением во времени передаются адресная информация и данные. В первом такте цикла шины — цикла обращения к ЗУ или внешнему устройству (ВУ) —МП выдает на эту шину младшие 16 бит адреса памяти или полный адрес внешнего устройства. Этот адрес обязательно должен быть зафиксирован и сохранен в течение всего цикла, для чего используется внешний регистр-защелка, куда записывается адресная информация с помощью строба адреса ALE. Регистр-защелка должен иметь три стабильные выходные буферы и обеспечивать малое время переключения при большой нагрузочной способности. Во второй половине цикла шины по линиям AD15-AD0 передаются адреса данных или байты команд, сопровождаемые стробом данных DEN.
A19/S6—A16/S3 — мультиплексные выходные линии адреса/состояния. В первом такте на эти линии выдаются старшие 4 бит адреса памяти, а при адресации ВУ — нули.
|
|
|
|
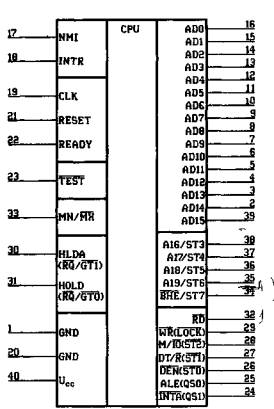
Рис. 3.3. Условное графическое обозначение МП ВМ86 |
|
ВНЕ—разрешение старшего байта. Формируется в первом такте цикла одновременно с адресной информацией. Активный сигнал нулевого уровня ВНЕ означает, что по старшей половине AD15—AD8 шины адреса/данных передаются 8-битовые данные. Сигнал ВНЕ защелкивается во внешнем регистре адреса и используется как дополнительный адресный выход, определяющий доступ к старшему банку памяти либо к ВУ с байтовой организацией, подключенному к старшей половине шины AD. Совместное использование ВНЕ и младшей линии адреса А0 для дешифрации адресов позволяет осуществлять передачу слов или отдельных байтов по шине AD (табл. 3.1).
Таблица 3.1
BHE , A0 |
Разрядность данных |
0 0 |
Все слово (оба байта) |
0 1 |
Старший байт D15-D8, нечетный адрес |
1 0 |
Младший байт D7-DO, четный адрес |
1 1 |
Нет обращения |
ALE — строб адреса (разрешение защелкивания адреса), выдается в начале каждого цикла шины и используется для записи адреса в регистр-защелку, т. е. для демультиплексирования шины AD.
DEN (или DE) —строб данных (разрешение передачи данных). Выдается в циклах чтения, записи и разрешения выхода шинных формирователей.
RD - чтение, идентифицирует выполнение цикла чтения из ЗУ или ВУ (в зависимости от значения сигнала M/IO). Указывает этим устройствам на необходимость выдачи данных на шину.
WR - запись, указывает на выполнение цикла записи в ЗУ или ВУ и сопровождает данные, выдаваемые микропроцессором на шину.
М/IO - является признаком обращения к ЗУ (M/IO = 1) или ВУ (М/IO=0) и используется для разделения адресного пространства памяти и ввода/вывода. Значение М/IO = 0 появляется только при выполнении команд ввода (IN) и вывода (OUT).
DT/R — передача/прием данных, определяет направление передачи по шине AD: DT/R = 1 — запись данных из МП в ОЗУ или ВУ, DT/R = 0 — чтение данных из ЗУ или ВУ в МП. Предназначен для управления шинными формирователями и действует на протяжении всего цикла шины, как и сигнал М/IO. Отметим, что направление передачи данных через шинные формирователи может также определяться с помощью сигналов RD и WR, но они имеют меньшую длительность и поэтому менее удобны.
HOLD — запрос шины (запрос захвата) от внешней подсистемы (ВУ или контроллера прямого доступа к памяти).
HLDA — подтверждение захвата шины, выдается в ответ на сигнал HOLD после приостанова вычислительного процесса в МП и перевода шины AD и некоторых управляющих сигналов в z-состояние. При HLDA=1 подсистема инициирующая запрос захвата, может использовать шину самостоятельно. После установления HOLD=0 ЦП выдает сигнал HLDA = 0, возобновляет управление шиной и продолжает работу по программе.
NMI — немаскируемое прерывание, распознается микропроцессором по завершению текущей команды независимо от состояния флага разрешения прерывания IF. Этот вход предназначен для сигнализации о некоторых критических ситуациях, например об аварийном отключении сетевого питания.
INTR— запрос прерывания (маскируемый), опрашивается центральным процессором в конце выполнения каждой команды, если прерывания разрешены (IF= 1) и фиксируется во внутреннем триггере. Обычно на вход INTR подается запрос от программируемого контроллера прерываний К1810ВН59А. Если IF = 0, то запрос по входу INTR игнорируется.
INTA — подтверждение запроса прерывания, формируется в ответ на принятый запрос прерывания INTR, выполняет функцию сигнала RD в цикле подтверждения прерывания и стробирует считывание указателя адреса (вектора) прерывания. В каждом случае подтверждения прерывания выполняются два цикла INTA, из которых первый является предварительным и не сопровождается чтением информации.
RDY — готовность, указывает на то, что адресуемое в данном цикле устройство готово к обмену данными. Если устройство не готово к взаимодействию с МП, оно выдает сигнал RDY = 0, и МП переходит в состояние ожидания. В этом случае между тактами ТЗ и Т4 цикла шины появляется необходимое число тактов ожидания TW. После установки сигнала RDY=1 МП выходит из состояния ожидания и возобновляет работу.
TEST— проверка, используется вместе с командой ожидания WAIT, выполняя которую МП проверяет уровень сигнала TEST. Если TEST = 0, МП переходит к выполнению следующей по порядку команды. Если TEST = 1, МП вводит холостые такты TI и периодически, с интервалом 5Т, проверяет значение сигнала TEST. Команда WAIT и сигнал TEST обеспечивают синхронизацию работы МП с внешними сигналами: TEST — вход программной проверки, RDY — вход аппаратной проверки готовности устройств в системе.
CLK—тактовая синхронизация (тактирование). Сигнал синхронизации от внешнего генератора тактовых импульсов, предназначен для синхронизации МП. Используется серия тактовых импульсов CLK с периодом повторения Т, равным 200—500 нc.
RESET — сброс, переводит МП в определенное начальное состояние, в котором сброшены сегментные регистры (кроме CS, все разряды которого устанавливаются в единичное состояние), указатель команд IP, все флаги, регистры очереди команд и все внутренние триггеры в устройстве управления. Сигнал RESET не влияет на состояние общих регистров, которые устанавливаются в начальное состояние программным путем. На время действия сигнала RESET все выходы, имеющие три состояния, переводятся в третье состояние, а выходы, имеющие два состояния, становятся пассивными. Минимальная продолжительность сигнала RESET при первом включении МП составляет 50 мкс, а при повторном запуске — четыре такта синхронизации. После снятия сигнала RESET работа МП возобновляется из начального состояния.
MN/MX—минимальный/максимальный режимы. Сигнал на этом входе определяет режим работы МП: 1 — минимальный, 0 — максимальный, когда изменяются функции восьми управляющих сигналов.