

Розділ 1. ОСНОВНІ ПОНЯТТЯ ТА ВИЗНАЧЕННЯ
Теорія надійності як наука оперує такими основними поняттями та визначеннями.
Надійність — це властивість виробу (деталі, приладу, системи) виконувати задані функції, зберігаючи свої експлуатаційні показники в заданих межах, при певних режимах і умовах експлуатації, протягом необхідного часу чи необхідного об'єму виконаної виробом роботи.
Об'єм роботи виробу (кілометри, гектари, кубометри) чи тривалість функціонування виробу (години, цикли) характеризують таке поняття в теорії надійності як наробка.
Працездатність — властивість виробу виконувати задані функції з параметрами і характеристиками, які відповідають технічній документації.
Властивість виробу зберігати працездатність (тобто не мати відмов) протягом заданого часу і при визначених умовах експлуатації називається безвідмовністю.
Відмова — подія, після якої виріб перестає виконувати (цілком або частково) свої функції, або, інакше кажучи, — це подія, яка спричиняє перехід виробу з працездатного стану в непрацездатний.
Відмови можна класифікувати за цілим рядом ознак (табл. 1).
Пояснимо, що розуміють під тим чи іншим видом відмови,
Повні (катастрофічні) відмови — це такі відмови, при яких прилад втрачає працездатність (короткі замикання в електричних колах, поломки, заїдання і деформації механічних деталей, згорання чи розплавлений деталей конструкції і компонентів схем).
Часткові (параметричні) відмови — це погіршення якості функціонування виробу. Якщо погіршення якості функціонування виробу не призводить до відмови, то такі несправності називають дефектами, і їх розгляд виходить за межі теорії надійності.
Класифікація відмов Tаблиця 1
|
Класифікаційні ознаки |
Види відмов |
|
За ступенем впливу на працездатність |
|
|
За зв'язком з іншими відмовами |
1. Залежна 2. Незалежна |
|
За часом появи відмови |
2. Поступова |
|
За тривалістю існування відмови |
2. Тимчасова |
Класифікація відмов на раптові і поступові до деякої міри умовна, тому що появі раптової відмови, здебільшого, передують скриті зміни властивостей елементів, які не вдається проконтролювати.
Такі типи відмов, як залежна і незалежна, або стійка і тимчасова, не потребують додаткового пояснення, тому що суть відмови повністю виражена в її назві.
У теорії надійності розрізняють два класи виробів:невідновлювані (не ремонтовані), тобто такі, які не підлягають ремонту у випадку відмови, і відновлювані, тобто ремонтопридатні. До перших належать переважно елементи складних виробів — деталі радіоелектронної апаратури, машин і приладів. Деякі пристрої можна розглядати як невідновлювані за одних умов і відновлювані за інших (наприклад, бортові пристрої ракет або штучних систем в космосі невідновлювані в польоті і відновлювані при підготовці до стартів).
Зауважимо, що надійність невідновлюваного виробу насамперед визначається його безвідмовністю.
Довговічність виробу — це здатність до довготривалої експлуатації при необхідному технічному обслуговуванні, до якого можуть входити різні види ремонтів.
Ремонтопридатність — це пристосовуваність виробу до попередження, знаходження і ліквідації відмови.
Ресурс — наробкадо критичного стану, який регламентується технічною документацією. Цей показник властивий виробам з особливо відповідальними функціями (літальні пристрої, системи;атомної енергетики тощо).
Елемент розрахунку надійності — це пристрій (деталь, елемент, прилад, лінія або канал зв'язку, система або комплекс' систем), який входить до розрахунку надійності окремою! самостійною частиною, що має свій загальний кількісний показник надійності.
Виріб — це будь-який предмет, чи сукупність предметів виробництва, які виробляються підприємством. Виробами можуть бути деталі, збірні модулі, комплекси і комплекти.
Система — це виріб, який складається з комплектуючих частин, що об'єднані або не об'єднані збірними операціями, і призначений для виконання певних функцій. Система може представляти собою не тільки сукупність комплектуючих технічних засобів, але й мати в своєму складі і нетехнічні засоби, наприклад, програмне забезпечення, людину-оператора та інше.
Об'єкт — це предмет цільового призначення, який розглядається в період проектування, виробництва, експлуатації, вивчення, дослідження чи випробування на надійність. Об'єктами можуть бути як системи, так і їх елементи.
В теорії надійності розглядають три найбільш вживані показники надійності:
— ймовірність безвідмовної роботи протягом заданого часу;
— середній час напрацювання до відмови;
— коефіцієнт готовності виробу.
Знаходження цих показників для різних теоретичних розподілів випадкових величин, що характеризують надійність виробів, буде розглянуто в наступних розділах.
Неремонтовані вироби працюють до першої відмови. Цілий ряд показників надійності неремонтованих об'єктів є характеристиками випадкової величини — часу наробки виробу до відмови. Під часом наробки до відмови розуміють тривалість роботи виробу. Для великої кількості виробів, які випробуються, цей показник є різним і носить випадковий характер, а його середньоквадратичне відхилення називається дисперсією.
Розділ 2. ТЕОРЕТИЧНІ АСПЕКТИ РОЗРАХУНКУ НАДІЙНОСТІ
2.1. Емпіричні залежності для оцінки надійності
Для кількісної оцінки надійності чи ненадійності роботи будь-якого виробу необхідно мати інформацію про поведінку цілої групи таких виробів, тобто простежити, як відмовляють елементи в часі. У цьому випадку можливі дві ситуації, які можна проілюструвати графіками (рис.2.1а і 2.16). Ці графіки представляють собою залежності кількості працездатних елементів в часі, тобто n(t) у вигляді гістограми (а) та її лінійної апроксимації (б), коли графік проходить через значення n(ti) на початку часового інтервалу.

Рис.2.1 Дискретна (гістограма) і неперервна (апроксимована) функції п(t).
З графіків 2.1 насамперед можна визначити функцію працездатності (надійності)
P*(t)=n(t)/No. (2.1)
де N„ — початкова кількість елементів.
Очевидно, що Р*(0) = 1, а Р*() = 0.
Знайдемо кількість елементів, які вийшли з ладу (відмовили) за час
n = n(ti)-n(ti+t). (2.2)
Тоді швидкість виходу з ладу визначимо як відношення n/t. Для отримання нормалізованої форми цієї швидкості (густини відмов) перейдемо до співвідношення
![]() .
(2.3)
.
(2.3)
Зрозуміло, що така функція залежить від того, в якому місці на осі часу розглядається інтервал t, і тому не може бути параметром надійності елемента. Цього можнo уникнути, якщо швидкість виходу з ладу елементів розділити на n(ti)
![]() .
(2.4)
.
(2.4)
Характеристику, яку ми одержали, назвемо емпіричною інтенсивністю відмов, або емпіричною функцією азарту.
Крім емпіричної функції надійності P*(t), широко використовується емпірична функція ненадійності (відмов) Q*(t)
![]() .
(2.5)
.
(2.5)
Залежності (2.1)—(2.5) записані для випадку, коли n(t) зображено графіком на рис.2.1 ,а, до того ж t = const на всьому часовому інтервалі. У випадку, коли n(t) зображено графіком на рис.2.1,6, емпіричну функцію надійності в будь-який момент часу розраховуємо за формулою
![]() (2.6)
(2.6)
![]()
Графічний вираз (2.6) наведено на рис2.2. , а функції f*(t) i *(t) в цьому випадку набувають вигляду
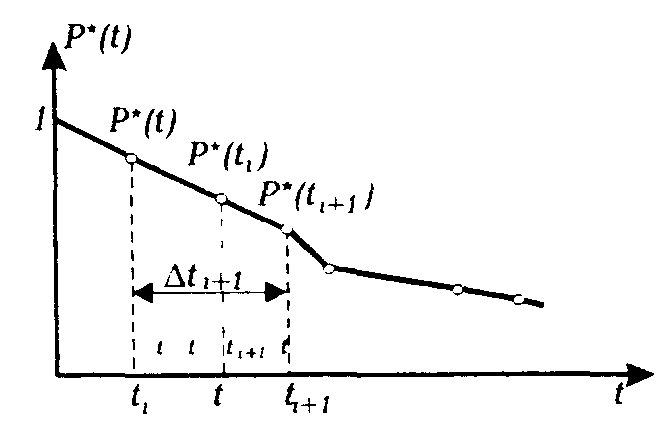
Рис.2.2. Залежність емпіричної функції надійності від часу.
![]() .
(2.7)
.
(2.7)
![]() .
(2.8)
.
(2.8)
Величину n(t) розраховуємо за даними спостереження в моменти часу t ± ti+1 , між якими знаходиться час t, таким чином:
![]() (2.9)
(2.9)
Ми розглянули випадки, коли t=const, або є змінним. У той же час можна t змінювати не довільно, а фіксувати інтервали часу, протягом якого відмовляє один елемент, тобто
![]() .
(2.10)
.
(2.10)
У цьому випадку отримаємо:
![]() ti<t<ti+1
ti<t<ti+1
![]() ti<t<ti+1.
(2.11)
ti<t<ti+1.
(2.11)
2.2. Ймовірнісні характеристики надійності
Для кількісної оцінки надійності функціонування неремонто-ваних виробів широко використовують характеристики та поняття, трактування яких запозичене з теорії ймовірності. Це пояснюється тим, що відмови мають випадковий характер, а тому описуються ймовірнісними залежностями.
Отже, можна говорити про двояке трактування характеристик надійності: емпіричні, на основі статистичних досліджень, і теоретичні, які визначаються на основі постулатів теорії ймовірності. Останні дали змогу викристалізуватися теорії надійності в науку зі своїм специфічним апаратом досліджень.
Як вже згадувалося, одним з основних показників надійності є ймовірність безвідмовної роботи виробу протягом заданого часу, інакше кажучи — це ймовірність того, що час Г безвідмовної роботи елемента чи системи буде більшим від заданого часу t, тобто
P(t)=P{T>t}. (2.12)
Аналогом цієї характеристики є функція працездатності P*(t), вираз (2.1) якої записаний в розділі 2.1.
Ймовірність відмов Q(t) — це ймовірність того, що час Г безвідмовної роботи елемента чи системи буде меншим від заданого часу t, тобто
Q(t)=P{T<t}. (2.13)
Аналогом цієї характеристики є функція ненадійності Q*(t), яку описує вираз (2.5).
Оскільки події «відмова» і «невідмова» утворюють повну групу подій, то
P(t)+Q(t)=l. (2.14)
Одним з недоліків показників P(t) і Q(t) є їхня залежність від часу. Тому ці характеристики здебільшого використовують для порівняльного аналізу надійності декількох виробів в один і той самий час, визначаючи коефіцієнт збільшення ймовірності безвідмовної роботи
Sp=P1(ti)/P2(ti) (2.15)
або коефіцієнт зменшення ймовірності відмов
Sq=Q1(ti)/Q2(tI). (2.16)
Для оцінки тенденції зміни функції Q(t)служить густина розподілу часу наробки до відмови f(t) (аналог — густина відмов f*(t)}. Традиційно густину функції відмов визначають
f(t) == dQ(t)/dt, (2.17) причім
![]() (2.18)
(2.18)
Ймовірність відмов в інтервалі часу t, ...t, можна виразити через f(t) таким чином
![]()
![]()
![]()
 (2.19)
(2.19)
або, якщо t1=0 ,a t2=
![]() (2.20)
(2.20)
Очевидно, що
Q(0)=0,Q()=1 (2.21)
З виразу (2.21) на основі (2.14) випливає, що
P(0) = 1, Р() = 0. (2.22)
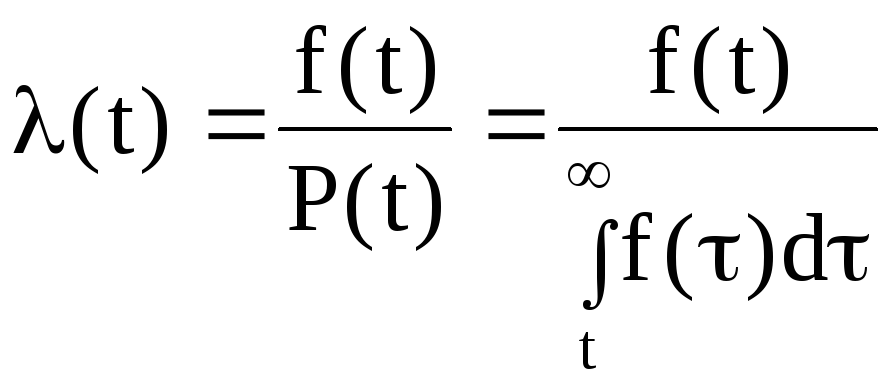
Наступною характеристикою є функція, яку називають функцією азарту, або інтенсивністю відмов. Ми будемо користуватися останньою назвою.
Інтенсивність відмов визначають як кількість відмов перемонтованого виробу з партії виробів в одиницю часу після даного моменту часу, за умови, що до цього моменту відмова не виникла.
Розглянемо два інтервали часу на часовій осі. Перший (0,t) і другий (t, t+t).
_________________t_____________________
0 t t+t Час
Для того, щоб якийсь елемент міг відмовити в інтервалі часу (t, t+t), він мусить безвідмовно попрацювати в інтервалі (0,t).
Тому ймовірність відмови q(t, t+t) за час t згідно з правилом множення ймовірності
q(t, t+t) =f(t)dt=P(t)Z(t) (2.23)
де P(t) — ймовірність безвідмовної роботи елемента протягом інтервалу часу (0,t); Z(t) — умовна ймовірність відмови елемента за час (t, t+t) , знайдена з урахуванням того, що елемент безвідмовно працював протягом часу (0,t).
Нехай цю умовну ймовірність виражає формула
Z(t)=(t)dt,
де (t)-інтенсивність відмов.
Враховуючи,
що
![]() ,знайдемо
,знайдемо
![]() .
.
Проілюструємо взаємозв'язок між P(t), Q(t), f(t), (t) на графіку (рис.2.3) залежності f(t)
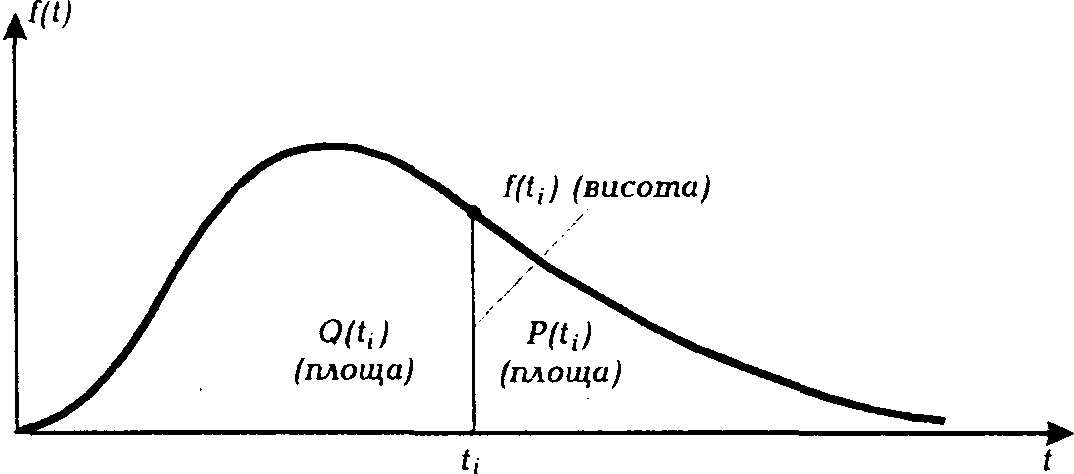
Рис.2.3. Графічне зображення співвідношення між характеристиками (крива розподілу часу наробки до відмови).
Інтенсивність відмов (t) у відповідності з графіком рис.2.3 визначається як частка від ділення функції f(t) (висота) на площу, яка є праворуч від висоти. Графік f(t) називають кривою розподілу часу наробки до відмови.
Якщо відома будь-яка функція з чотирьох f(t), Q(t), P(t) чи (t), то три інші можна визначити. Доведемо це.
Випадок 1.
Відомо f(t). Знайдемо інші три функції:
![]() . (2.24)
. (2.24)
![]() . (2.25)
. (2.25)
 . (2.26)
. (2.26)
Випадок. 2.
Відомо Q(t). Знайдемо інші три функції:
f(t) = dQ(t)/dt. (2.27)
P(t)= l-Q(t). (2.28)
(t)==(dQ(t)/dt) l-Q(t). (2.29)
Випадок. 3..
Відомо P(t). Знайдемо інші три функції:
Q(t) = l-P(t) . (2.30)
f(t)=-dP(t)/dt. (2.31)
![]() . (2.32)
. (2.32)
Випадок 4.
Відомо (t}. Знайдемо інші три функції. Перейшовши до іншої змінної , домножимо праву і ліву частини виразу (2.32.) на d
-()d=dP()/P() (2.33)
Проінтегруємо вираз (2.33) з межами інтегрування 0 t.
![]() . (2.34)
. (2.34)
Враховуючи, що Р(0) = 1, запишемо
InP(t)=-
![]() .
.
(t) — сумарна (кумулятивна) функція інтенсивності відмов. Таким чином отримаємо:
 (2.35)
(2.35)
Оскільки f(t) = (t) P(f), то запишемо
 (2.36)
(2.36)
Нарешті, ймовірність відмов може бути знайдена так:
 (2.37)
(2.37)
Вирази (2.35), (2.36), (2.37) дають змогу знайти три функції через відому функцію інтенсивності відмов (t).
Доволі часто використовують таку характеристику, як середній час наробки до відмови Tм , який є математичним сподіванням часу наробки до відмови.
У відповідності з визначенням математичного сподівання неперервної невід'ємної випадкової величини запишемо
![]() . (2.38)
. (2.38)
Інтегруючи по частинах, отримаємо
Tм=-![]() .
.
Оскільки:
-![]() ,
,![]()
то
![]() . (2.39)
. (2.39)
Таким чином, середній час наробки до відмови чисельно дорівнює площі під кривою P(t). У випадку, якщо (t)=const, то з виразу (2.39) отримаємо
![]() (2.40)
(2.40)
Підставивши в (2.35) значення t=Tм= 1/, знайдемо, що середній час наробки до відмови можна розуміти як наробку t=Tм, протягом якої виріб залишається працездатним з ймовірністю P(Tм) = exp(-l) = 0,37.
Для простих перемонтованих виробів, наприклад, елементів електронних схем, середня наробка до першої відмови є поняттям умовним, тому що переважно вони не експлуатуються так довго і старіють значно швидше, ніж встигають напрацювати Тм. Середній час наробки до відмови може бути визначений за статистичними даними як середньоарифметичне значення часу наробки до відмови виробів даної партиї (оцінка Тм по вибірці)
![]() . (2.41)
. (2.41)
Незручність цієї формули полягає в тому, що необхідно знати часи виходу з ладу кожного з усіх виробів партії.
За іншим способом визначають час tn, протягом якого виходять з ладу всі вироби даної партії, а також значення інтервалу часу t і кількість елементів m, які відмовили в цьому інтервалі. Тоді
![]() . (2.42)
. (2.42)
де k=tn/t, tcepi=(t-i+1+ ti)/2
Для ремонтованих систем (систем з відновленням відповідними критеріями надійності [14] є:
— ймовірність наробки між відмовами Р(Тз) більше заданого часу Тз;
— параметр потоку відмов системи (t);
— наробка на відмову t н.
Під наробкою на відмову розуміється середня тривалість, чи об'єм роботи системи між відмовами, які виникають послідовно.
Величина Р(Тз) — це є ймовірність того, що наробка між відмовами tн буде більшою заданого часу Tз:
P(Tз)=P{tн>Tз} (2.43)
Цей показник є одним з найважливіших стосовно ремонтованих систем.
Процес функціонування пристроїв складається з послідовності відмов, які відбуваються одна за одною у випадкові моменти часу за умови негайного відновлення. Важливим показником потоку відмов є параметр потоку, який визначається ймовірністю появи хоча б однієї відмови в одиницю часу після моменту t.
Потік відмов елементів розглядається в таких системах, де ці елементи послідовно відмовляють. Мова йде про те, що елемент, який спочатку функціонував у системі, відмовив; його замінюють новим, який пізніше також відмовить, і т.д. Статистичне параметр потоку можна розрахувати як відношення середньої кількості відмов в одиницю часу m'(t)/t до загальної кількості позицій системи N', де ці елементи встановлені
*(t)=![]() . (2.44)
. (2.44)
Потоки відмов елементів переважно є одинарними, тобто такими, в яких ймовірність появи в якийсь момент часу більше однієї відмови дуже мала і нею можна знехтувати. Потік відмов ремонтованої системи утворюється сукупністю одинарних потоків відмов елементів, що в неї входять, які розміщені на відповідних позиціях. Параметр потоку відмов такої ремонтованої системи *(t) дорівнює сумі параметрів потоків *(t) складових елементів, які розміщені на m* позиціях
![]() . (2.45)
. (2.45)
Важливо відзначити, що в загальному випадку параметр потоку відмов*(t) в тій позиції системи, де встановлено елемент, не дорівнює інтенсивності відмов (t) цього елемента. Порівнюючи вираз для статистичного визначення інтенсивності відмов*(t) і *(t) , видно, що ці характеристики є різними і збігаються тільки при (t) = const. Зокрема, це слід мати на увазі при визначенні показників надійності за статистичними даними, які отримані в експлуатаційних умовах. Характер таких даних і способи їх обробки часто є такими, що фактично оцінюють параметри потоку відмов. Використання цих величин в ролі величин інтенсивностей відмов може призвести до значних похибок при розрахунку надійності.
Потік відмов називається стаціонарним, якщо ймовірність появи якоїсь кількості відмов в інтервалі часу t... (t+t) залежить тільки від t і не залежить від t. Параметр стаціонарного потоку є постійною величиною. Для елемента, який встановлений в i—тій позиції системи, він дорівнює величині, оберненій значенню середнього часу Тim наробки до відмови елемента:
![]() .
(2.46)
.
(2.46)
Важливою властивістю потоку відмов є його наслідки. Відсутність наслідків означає, що відмови є випадковими і незалежними однієї події від іншої. Потік відмов, якому одночасно властива одинарність, стаціонарність і відсутність наслідків, називається простим (або пуассонівським) потоком.
Поширеним показником надійності ремонтованих систем є наробка до відмови Tн . Якщо відома густина ймовірності часу між відмовами (tн) то Tн може бути визначено так:
![]() (2.47)
(2.47)
В
усталеному режимі роботи системи, коли
*(t)![]() =
const,
наробка до відмови дорівнює величині,
оберненій параметру потоку відмов
=
const,
наробка до відмови дорівнює величині,
оберненій параметру потоку відмов
![]() .
(2.48)
.
(2.48)
Ремонтовані системи характеризуються також показниками ремонтопридатності. Показником ремонтопридатності є ймовірність P(t зв) відновлення системи за заданий час tв і середній час відновлення Тв. Якщо густина ймовірності відновлення системи визначається функцією f(tв), то ймовірність відновлення за час tв дорівнюватиме
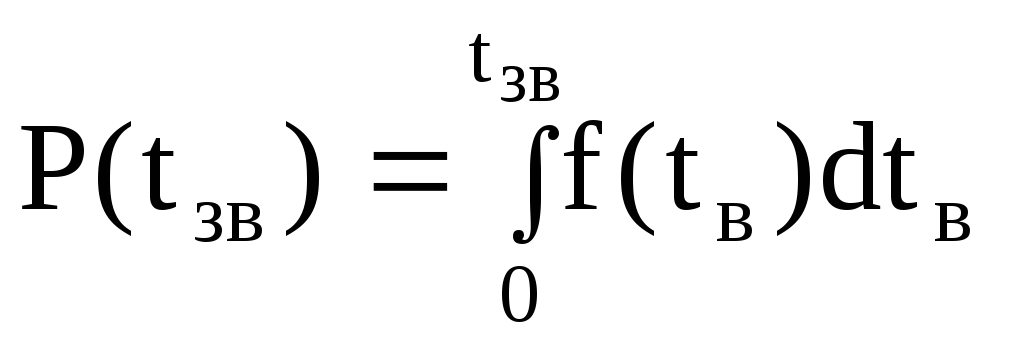 (2.49)
(2.49)
а середній час відновлення буде
![]() (2.50)
(2.50)
Середній час відновлення показує середні затрати часу на виявлення і ліквідацію відмови при деяких заданих умовах роботи.
Крім розглянутих показників надійності ремонтованих систем, існують ще й інші, а саме: функція готовності і простою, коефіцієнти готовності і простою. Ці показники більш детально розглядаються в § 5.2.
Очевидно, що показники надійності як перемонтованих, так і ремонтованих пристроїв і систем є різноманітними, але між ними існують певні зв'язки. Тому при аналізі надійності слід використовувати не всі показники, а вибирати ті, які найповніше характеризують надійність, і до кожного випадку підходити індивідуально.