

Вступ. Предмет і мета курсу.
У даний час науково-технічний прогрес в різних галузях промисловості напряму звязаний з впровадженням інформаційних технологій у всі сфери діяльності підприємств. Це викликано збільшенням обємів технологічної та комерційної інформації (І), швидкістю й оперативністю її обробки, підвищенням рівня достовірності. Актуальність впровадження І-технологій обумовлена модернізацією діючих і розробкою нових АСУ, переходом на новітні мікропроцесорні технології і, що саме головне, переходом економіки до ринкових відносин.
Визначення найбільш правильних і досконалих технічних рішень по розвитку систем контролю й управління обєктами ЕЕС і системи в цілому дозволить підвищити надійність Е-споживання та якість ЕЕ, знизити енергозатрати.
Іншими словами, широке впровадження АСУ і ЕОМ як її невідємної частини є обєктивною необхідністю і забезпечує:
-
оперативне І-обслуговування СУ;
-
скорочення на основі централізації й автоматизації І-потоків;
-
підвищення ступеня І-використання;
-
звільнення працівників управлінь та економічних служб від трудомістких рахункових робіт;
-
оптимізацію параметрів протікання технологічних процесів;
-
підвищення оперативності керівництва виробничо-господарською діяльністю.
Відмітимо, що створення АСУ – це не тільки і не стільки розвязок задач на ЕОМ, це впровадження принципово нового підходу до вдосконалення СУ. В результаті використання ЕОМ змінюється роль людини в СУ: обробку І здійснює ЕОМ, а за людиною залишається аналіз, прийняття і реалізація рішень.
При цьому, необхідно враховувати, що АСУ є людино-машинною системою, в якій на першому місці повинні стояти інтереси людей. Дійсно, можна створити добру модель, ефективний алгоритм, написати і відлагодити програму, організувати збір та обробку І, але якщо при розробці не буде врахований людський фактор, важко очікувати успішної експлуатації системи. Труднощі, які виникають при взаємодії людини й ЕОМ, повинні розвязуватись за рахунок ускладнення роботи ЕОМ.
Зазначимо, що в силу специфіки і складності процеси створення, впровадження та функціонування АСУ ще не формалізовані і чітко по одних і тих же питаннях існують різні точки зору. Ця трудність є особливістю даного курсу.
Мета курсу:
-
ознайомитись з основними напрямками вдосконалення управління на основі ЕОМ;
-
мати уявлення про сучасний стан розвитку АСУ, зокрема в Е-енергетиці;
-
набути практичних навиків по організаційно-економічній постановці задач управління в умовах АСУ;
-
ознайомитись з практичними рекомендаціями по розрахунку економічної ефективності задач і методології побудови АСУ;
Обєкти вивчення: ЕЕС та її обєкти ( елементи).
Предмет вивчення: І-процеси, звязані з управлінням ЕЕС та її підприємствами, можливість їх автоматизації.
Література
-
Самсонов В.С. АСУ в енергетике.-М: Высш. Шк.,1990.-208с.
-
Поспелов Г.Е.,Кернего В.В. АСУ и оптимизация режимов энергосистем.- Минск: Высшая шк.,1977.-320с.
-
головко Д.Б., Рего К.Г., Скрипник Ю.О. Автоматика і автоматизація технологічних процесів.-Київ : Либідь,1997.-232с.
-
Автоматизированное управление технологическими процессами/ Под ред. В.Б. Яковлева-Л.:Изд-во Ленинград. У-та,1988.-224с.
-
Стефани Е.П. Основы построения АСУТП.-М.: Энергоиздат,1982.-352с.
-
Родпонов В.Д., Терехов В.А.,Яковлев В.Б. Технические средства АСУТП.-М.: Высш.шк., 1989.-264с.
-
Митюшкин К.Т. Телеконтроль и телеуправление в энергосистемах.-М.: Энергоатомиздат,1990.-288с.
-
Беркович М.А., Гладышев В.А., Семенов В.А. Автоматика энергосистем.-М.:Энергоатомиздат,1991.-240с.
-
Баркан Я.Д., Орехов Л.А. Автоматизация энергосистем.-М.:Высш.шк.,1981.-272с.
-
Спеціальні журнали з електроенергетики.
2. Керування (управління) як необхідний і визначальний елемент матеріального виробництва.
2.1 Структура виробництва з позиції управління
У всякому трудовому процесі є три основні складові:
-
знаряддя, за допомогою яких здійснюється необхідний вплив на предмет праці (технологічна складова)
-
джерело енергії для виконання роботи (енергетична складова)
-
система управління робочим процесом, яка здійснює доцільну координацію виконання знарядь виробництва і джерела енергії (управлінська складова)
В процесі еволюції способів виробництва суттєвих змін зазнали всі три складові, зокрема при машинному автоматизованому способі виробництва управління здійснюється керуючими пристроями без прямої і безперервної участі людини. Термін походить від грецького - самодіючий.
2.2 Поняття про локальну систему управління
Системи, які керують потоком енергії або речовини, що проходить від джерела (Дж) до об’єкта управління (ОУ).
Узагальнена структура ЛСУ
Р

 ПІ Р- розпорядча ланка
ПІ Р- розпорядча ланка
ПІ- повідомча інформація про
 стан
об’єкту (а!)
стан
об’єкту (а!)
(за зворотним зв’язком)
Р
 О
КІ РО КІ- керуюча інформація
О
КІ РО КІ- керуюча інформація
 (за
прямим зв’язком)
(за
прямим зв’язком)
РО- регулюючий орган
- збурювальний вплив
 навколишнього середовища
навколишнього середовища
Матеріальний носій інформації – сигнал певного виду, який передається по відповідному каналу зв’язку тим чи іншим способом: місцевим, дистанційним чи телемеханічним (один інформаційний канал зв’язку для множини ОУ).
Розпорядча ланка ЛСУ складається з 4-х інформаційних перетворювачів (елементів):
-
ЕС – елемент, який сприймає І про стан об’єкта і перетворює її у сигнал 4- форми, найдоцільнішої у даній системі керування (в системах з зручним керуванням – для візуального сприйняття людиною, автоматичних – найчастіше електричний або пневматичний сигнал);
-
ЕЗ – елемент, що задає інформацію про те, яким має бути стан обєкта;
-
ЛЕ – логічний елемент, який порівнює сигнали та і виробляє розпорядчий сигнал М, що вказує, як треба вплинути на обєкт для забезпечення заданого алгоритму його роботи;
-
ВЕ – виконавчий елемент, який на основі М безпосередньо впливає на РО, встановлюючи за його допомогою необхідний потік енергії або речовини.

ЕЗ ЛЕ ЕС ВЕ








РО
Системи керування, в яких всі звязки здійснюються автоматично називають локальними системами автоматизованого управління (САУ). Приклади в ЕЕС: АПВ, АВР, АЧР, АРЗ.
Основним напрямком розвитку автоматизації сьогодні є автоматизовані СУ технологічними процесами ( АСУТП), які поєднують усі локальні САУ в загальну систему (а іноді й замінюють їх) з метою оптимального керування, а також для забезпечення суміжних і вищих за ієрархією СУ необхідною інформацією.
У такій системі оператор бере участь у координації роботи окремих САУ та у виробленні найважливіших керівних рішень.
Центральну роль в АСУТП відіграють мікропроцесорні пристрої, зокрема мікроконтролери, що привело до якісних змін у структурі АСУТП. Для керування різними технологічними операціями можливе пристосовування недорогих універсальних пристроїв, які відносно просто переналагоджуються програмним способом. У розвитку сучасної автоматики це відіграє таку ж роль, як у машинобудуванні відіграло впровадження Е-двигунів замість механічної трансмісії.
Найвищим рівнем АСУ в сучасному виробництві є системи загального цифрового управління, коли всіма технологічними процесами замість локальних САУ безпосередньо керує центральний управлінський комплекс на основі спеціальної ЕЦОМ ( інформаційно-керуючий обчислювальний комплекс ).
5.4. Призначення, цілі і функції асутп.
Критерій управління – показник, який достатньо повно характеризує ступінь досягнення поставлених цілей, тобто якість проведення ТП. В строгій, звичайно математичній, формі критерій конкретизує мету створення даної системи. Одна із загальних постановок питання про критерій зводиться до намагання отримати найбільший економічний ефект. Йому відповідатиме оптимальне управління процесом.
Не меншу роль, ніж критерій, відіграють обмеження, які повинні дотримуватись при виборі керуючих дій. Обмеження бувають двох видів: фізичні. Які не можуть бути порушені навіть при неправильному виборі керуючої дії, та умовні, які можуть бути порушені, але порушення ведуть до значних збитків, що не враховується критерієм. При управлінні часто найбільш суттєві фактори враховуються саме обмеженнями, а не критерієм.
Як правило, загальний критерій економічної ефективності управління застосувати важко, тому формують часткові критерії оптимальності, які враховують специфіку ОУ і які доповнені умовними обмеженнями.
Таким чином, АСУТП є особливим класом систем управління, які характеризуються:
-
наявністю сучасних автоматичних засобів збору й обробки інформації, в першу чергу ЕОМ;
-
вагомою, а часто визначальною, роллю людини у вироблені рішень по управлінню;
-
переробкою технологічної і техніко-економічної інформації;
-
здійсненням управління в реальному масштабі часу ( в режимі реального часу).
2.Функції АСУТП
Функціонування АСУ – виконання нею встановлених функцій.
Функція АСУТП – це сукупність дій системи, спрямованих на досягнення часткової мети управління ( відмітимо, за участю людини!).
2.1. До інформаційних відносяться такі функції, результатом виконання яких є представлення оператору системи або якому-небуть зовнішньому отримувачу І про хід керованого процесу.
Характерні приклади:
а) контроль за основними параметрами, тобто безперервна провірка відповідності параметрів процесу допустимим значенням і негайне інформування персоналу при виникненні невідповідностей;
б) вимірювання або реєстрація за викликом оператора тих параметрів процесу, які цікавлять його в ході управління обєктом;
в) інформування оператора ( за його запитом ) про виробничу ситуацію на певній ділянці ТОУ в даний момент;
г) фіксація часу відхилень деяких параметрів процесу за допустимі межі;
д) обчислення досягнутих техніко-економічних показників роботи ТОУ;
е) періодична реєстрація вимірювальних параметрів і обчислювальних показників;
є) виявлення і сигналізація появи небезпечних ( перед аварійних, аварійних ) ситуацій.
2.2. Керуючі функції – дії по виробленню і реалізації керуючих дій на ТОУ.
До основних керуючих дій відносять:
а) стабілізацію змінних технологічного процесу на деяких постійних значеннях, які визначаються регламентом виробництва;
б) програмну зміну режиму процесу за завчасно заданими законами;
в) захист обладнання від аварій;
г) формування і реалізація керуючих дій, які забезпечують досягнення чи дотримання режиму, оптимального за технологічним або техніко-економічним критерієм;
д) розподіл матеріальних потоків і навантажень між технологічними агрегатами;
е) управління пусками і зупинками агрегатів і т.п.
2.3. Допоміжні функції – забезпечення контролю за станом функціонування технічних і програмних засобів АСУ.
3. Функціональна структура АСУТП.
Елементами є розглянуті вище функції системи їх частини ( операції, процедури), а звязки між елементами відображають інформаційно-логічну послідовність і підлеглість їх реалізації.
Така функціональна блок-схема АСУТП аналогічна ролі принципової схеми складного пристрою, з допомогою якої розкривається принцип його дії.
4. Характерні різновидності АСУТП.
Відрізняються способами виконання основних інформаційних і керуючих функцій.
4.1. АСУТП без обчислювального комплексу ( ОК ).
Найпростіший, історично перший, вид АСУТП, який в загальній структурі управління займає самий нижній ступінь ієрархії. Характеризується тісним звязком з ТОУ, деякою автономністю “поведінки”, найбільшою оперативністю контролю й управління. Звичайно застосовуються для керування простими ТОУ.
Основні функції:
-
контроль параметрів ТП;
-
стабілізація ТП;
-
програмне управління;
-
захист обладнання від аварій;
-
оперативний звязок з вищими рівнями управління.
Практично вся І про стан ТОУ вводиться автоматично від датчиків, а керуючі дії поступають безпосередньо на регулюючі органи.
Основні функціонально-апаратурні частини ( підсистеми):
-
інформаційні:
а) індивідуальний контроль;
б) контроль за викликом;
в) масовий контроль;
г) сигналізація;
-
управлінські (дистанційне управління, логічне У, автоматичне регулювання, захист ).
4.2. АСУТП з ОК, який виконує інформаційні функції:
ОК – сукупність обчислювальних пристроїв, які забезпечують виконання обчислювального процесу.
ОК виконує функції централізованого контролю, обчислення комплексних технічних і техніко-економічних показників, контроль роботи і стану процесу.
За оператором залишаються задачі аналізу І, прийняття рішень і здійснення керуючих дій.
4.3. АСУТП з ОК, який виконує керуючі функції в режимі “порадника”
Додаткові функції ОК: аналіз І і пошук оптимальних рішень з видачею рекомендацій по керуванню ( порад) оператору-технологу. Кінцевий вибір і здійснення керуючих дій залишаються за оператором.
Схема функціонування:
-
через задані проміжки часу (1 раз за 10...15 хвилин) дані про стан ТОУ і комплексні показники аналізуються на основі математичної моделі керованого процесу;
-
шляхом обчислень визначають дії, необхідні для наближення процесу до оптимуму;
-
результати видаються оператору, який діє у відповідності з цими рекомендаціями.
Один із серйозних недоліків розглядуваного режиму управління – обмежені можливості людини.
Переваги:
-
задовольняє вимозі обережного підходу до нових способів управління;
-
забезпечує добрі можливості для пробірки нових моделей процесу;
-
ОК може слідкувати за виникненням великого числа аварійних ситуацій.
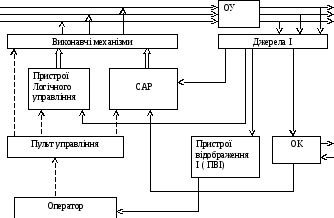
4.4. АСУТП з ОК, який виконує функції центрального керуючого пристрою ( супервізорне управління)
Характерна особливість: ОК включений у замкнутий контур автоматичного управління і виробляє керуючі дії, які поступають як сигнали завдань безпосередньо на вхід САР.
Основна задача – автоматичне підтримування ТП поблизу оптимальної робочої точки шляхом оперативної дії на нього.
Функції оператора зводяться до загального спостереження за перебігом (ходом) ТП. Пряме втручання людини потрібне лише при виникненні надзвичайних ситуацій.
Отже, ОК не тільки неперервно контролює ТП, але й автоматично керує ним поблизу оптимуму. Це, зокрема, дозволяє виключити флуктуації, звязані з якістю роботи різних операторів.
Функціональна блок-схема має вигляд:

 Регулюючі
величини керовані величини
Регулюючі
величини керовані величини
Зміна завдань
І про стан