

2.14. Методы улучшения качества работы сэр
Основными причинами ухудшающими работу СЭР явл:
-
Инерционность ОУ.
-
Высокочастотные помехи, которые накладываются на выходной сигнал j
-
Низкочастотные помехи, вызывающие дрейф статической характеристики .
Методы, улучшающие качество работы СЭР делятся на 2 группы:
-
Выбор (расчет) оптимальных значений параметров управляющей части
-
Алгоритмические методы улучшения качества. Рассмотрим некоторые из них :
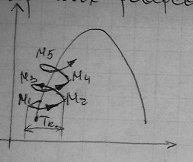
1.*
Камутатор поверочных реверсов – после
переключения через заданное время
![]() выполняется безусловный реверс системы.
выполняется безусловный реверс системы.
 Если
Если
![]() интервалов
между переключениями , поверочных
реверсов не происходит .
интервалов
между переключениями , поверочных
реверсов не происходит .
 2.*
Измерение произв. Статической характерист.
В таких системах скорость изменения u
не является постоянной : она пропорциональна
производной статической характеристики.
2.*
Измерение произв. Статической характерист.
В таких системах скорость изменения u
не является постоянной : она пропорциональна
производной статической характеристики.
D- делитель
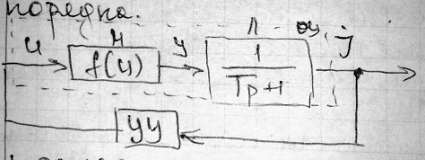
3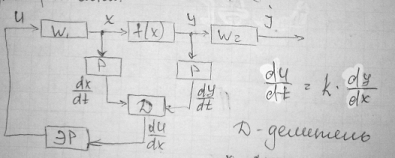 .*
Метод динамич. оптимизации. Применяется
в тех случаях , когда объект имеет
структуру НЛ, а его инерционная часть
есть апереодич. звено 1го порядка.
.*
Метод динамич. оптимизации. Применяется
в тех случаях , когда объект имеет
структуру НЛ, а его инерционная часть
есть апереодич. звено 1го порядка.
ОУ описывается уравнением:
![]()
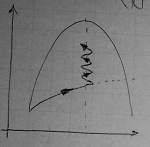
Из последнего уравнения видно, что при большом D на определенном интервале времени f(u)определяется первым слагаемым, значит в процессе движения max произв равен max характеристики:
max
J
![]() max
f(u)
max
f(u)
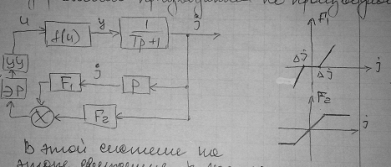 Поэтому
на этапе выхода в экстремум управление
производится по производной.
Поэтому
на этапе выхода в экстремум управление
производится по производной.
В этой системе на этапе движения к экстремуму (J – велико) работает блок F1, в режиме удержания блок F2
4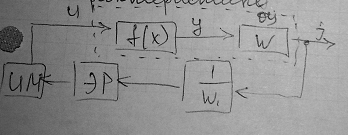 .*
Метод непрерывной динамической коррекции
. В устройстве управления использ. доп.
звено с передаточной ф-цией , обратной
инерционной части обьекта , при этом
происходит компенсация инерционности
объекта , а движение происходит по
статической характеристике
.*
Метод непрерывной динамической коррекции
. В устройстве управления использ. доп.
звено с передаточной ф-цией , обратной
инерционной части обьекта , при этом
происходит компенсация инерционности
объекта , а движение происходит по
статической характеристике