

2.4 Аналитические снс с настройкой по импульсной переходной функции (ипф) разомкнутого основного контура.
ИПФ называется реакция системы на импульс единичной площади и бесконечно малой длительности.
![]()
Данный подход применяется тогда, когда в системе действует возмущение и все процессы являются случайными процессами.
Разомкнутый основной контур имеет вид:
Н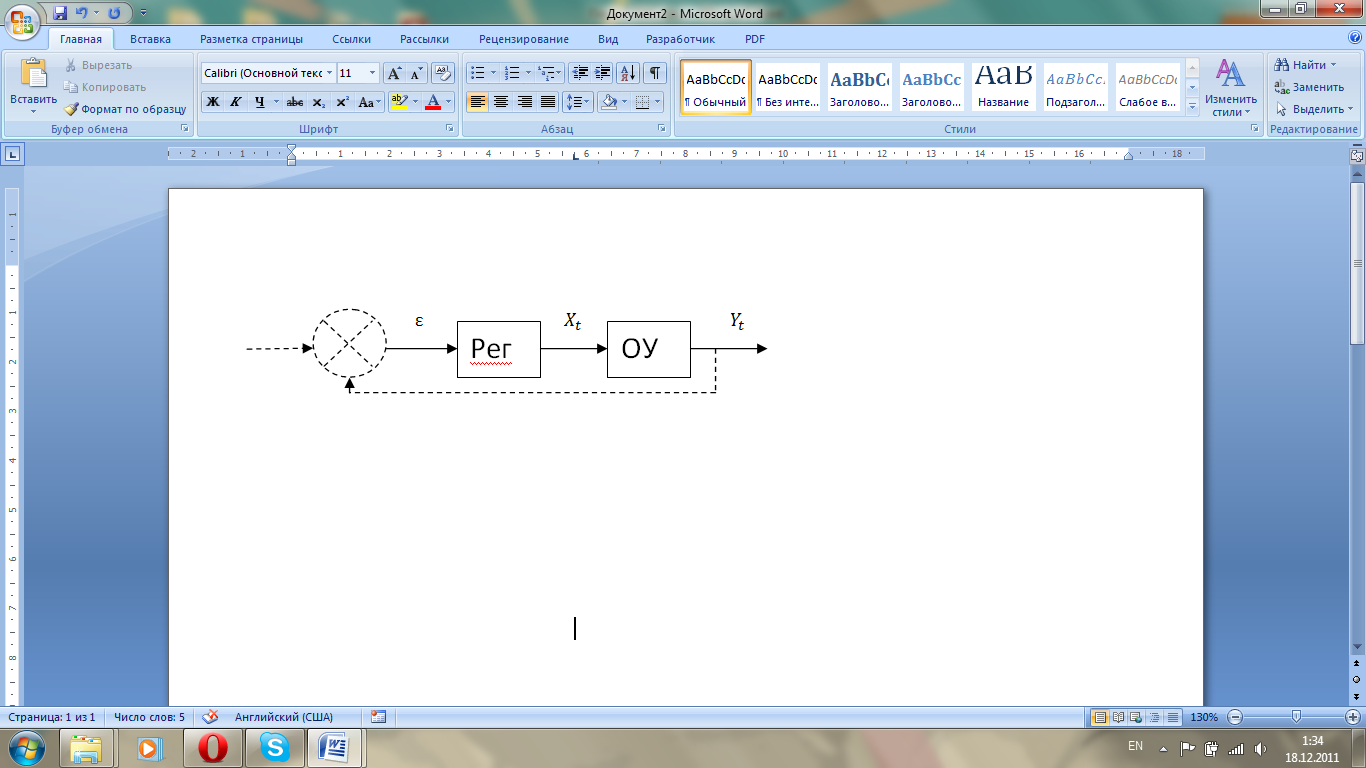 астройка
параметров регулятора осуществляется
с помощью уравнения Винера-Хопера:
астройка
параметров регулятора осуществляется
с помощью уравнения Винера-Хопера:

![]() – желаемая ИПФ разомкнутой системы.
– желаемая ИПФ разомкнутой системы.
![]() - ИПФ объекта.
- ИПФ объекта.
![]() - ИПФ регулятора.
- ИПФ регулятора.
![]() автокорреляционная
функция x(t).
автокорреляционная
функция x(t).
![]() – взаимокорреляционная функция процессов
x(t),
y(t).
– взаимокорреляционная функция процессов
x(t),
y(t).
На
очередном текущем интервале ![]() выполняются следующие действия:
выполняются следующие действия:
-
Вычисляется
 и
и  .
. -
Определяется ИПФ ОУ
 путем решения уравнения (2).
путем решения уравнения (2). -
Определяется оптимальное ИПФ регулятора путем решения уравнения (1).
2.5 Проектирование снс с моделью на основе прямого метода Ляпунова.
Система
является устойчивой, если функция от
ее координат является знакоопределенной
положительной, а производная этой
функции знакоопределенная отрицательная.
В данном методе такая функция Ляпунова
подбирается от ![]() и ее производной
и ее производной ![]()
![]()
![]() - разность выходов эталонной модели и
основного контура. Выполнение условий
устойчивости определяют структуру
контура самонастройки.
- разность выходов эталонной модели и
основного контура. Выполнение условий
устойчивости определяют структуру
контура самонастройки.
2.6. Аналитические снс с настройкой по внешним воздействиям
Такие системы применяются для поддержания оптимального режима работы в условиях изменения свойств внешних воздействий. Структурная схема такой системы имеет вид:
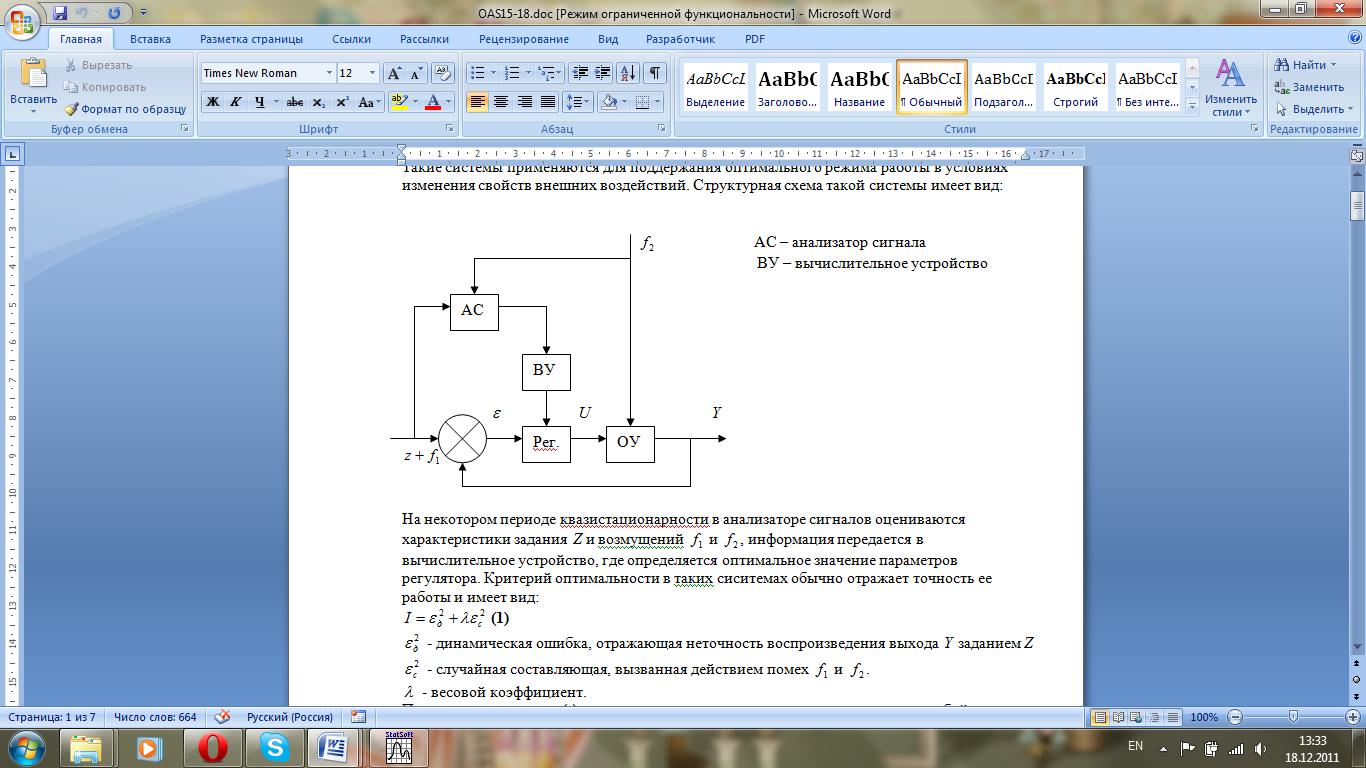 АС
– анализатор сигнала
АС
– анализатор сигнала
ВУ – вычислительное устройство
На
некотором периоде квазистационарности
в анализаторе сигналов оцениваются
характеристики задания
![]() и
возмущений
и
возмущений
![]() и
и
![]() ,
информация передается в вычислительное
устройство, где определяется оптимальное
значение параметров регулятора. Критерий
оптимальности в таких сиситемах обычно
отражает точность ее работы и имеет
вид:
,
информация передается в вычислительное
устройство, где определяется оптимальное
значение параметров регулятора. Критерий
оптимальности в таких сиситемах обычно
отражает точность ее работы и имеет
вид:
![]() (1)
(1)
![]() -
динамическая ошибка, отражающая
неточность воспроизведения выхода
-
динамическая ошибка, отражающая
неточность воспроизведения выхода
![]() заданием
заданием![]()
![]() -
случайная составляющая, вызванная
действием помех
-
случайная составляющая, вызванная
действием помех
![]() и
и
![]() .
.
![]() -
весовой коэффициент.
-
весовой коэффициент.
Предполагается
что
![]() на
периоде квазистационарности представляет
собой полином степени
на
периоде квазистационарности представляет
собой полином степени
![]() .
.
![]() и
и
![]() есть случайные стационарные процессы
с определенными характеристиками.
есть случайные стационарные процессы
с определенными характеристиками.
Параметры регулятора должны настраиватся так, чтобы обеспечить минимум критерию 1.
Пусть
А – вектор настраивающихся параметров
регулятора. Если определить аналитическое
задание
![]() ,
то путем решение системы уравнений
,
то путем решение системы уравнений
![]() (2),
можно найти оптимальное значение А.
(2),
можно найти оптимальное значение А.
Если
![]() полином степени
полином степени
![]() ,
то динамическая ошибка имеет вид:
,
то динамическая ошибка имеет вид:
![]() (3)
(3)
Коэффициент
![]() определяется по формулам:
определяется по формулам:
![]() ;
;
![]() ;
;
![]() ;
(4)
;
(4)
![]() -
передаточная функция основного контура
по каналу
-
передаточная функция основного контура
по каналу
![]() .
.
Случайная составляющая определяется по формуле:
![]()
![]() -
частотная характеристика основного
контура по каналу
-
частотная характеристика основного
контура по каналу
![]() (получается из передаточной функции
заменой
(получается из передаточной функции
заменой
![]() ).
).
![]() -
спектральная плотность помех.
-
спектральная плотность помех.
![]() зависит
от параметров регулятора А, таким образом
определяется функция
зависит
от параметров регулятора А, таким образом
определяется функция
![]() .
.
Системы экстремального регулирования
С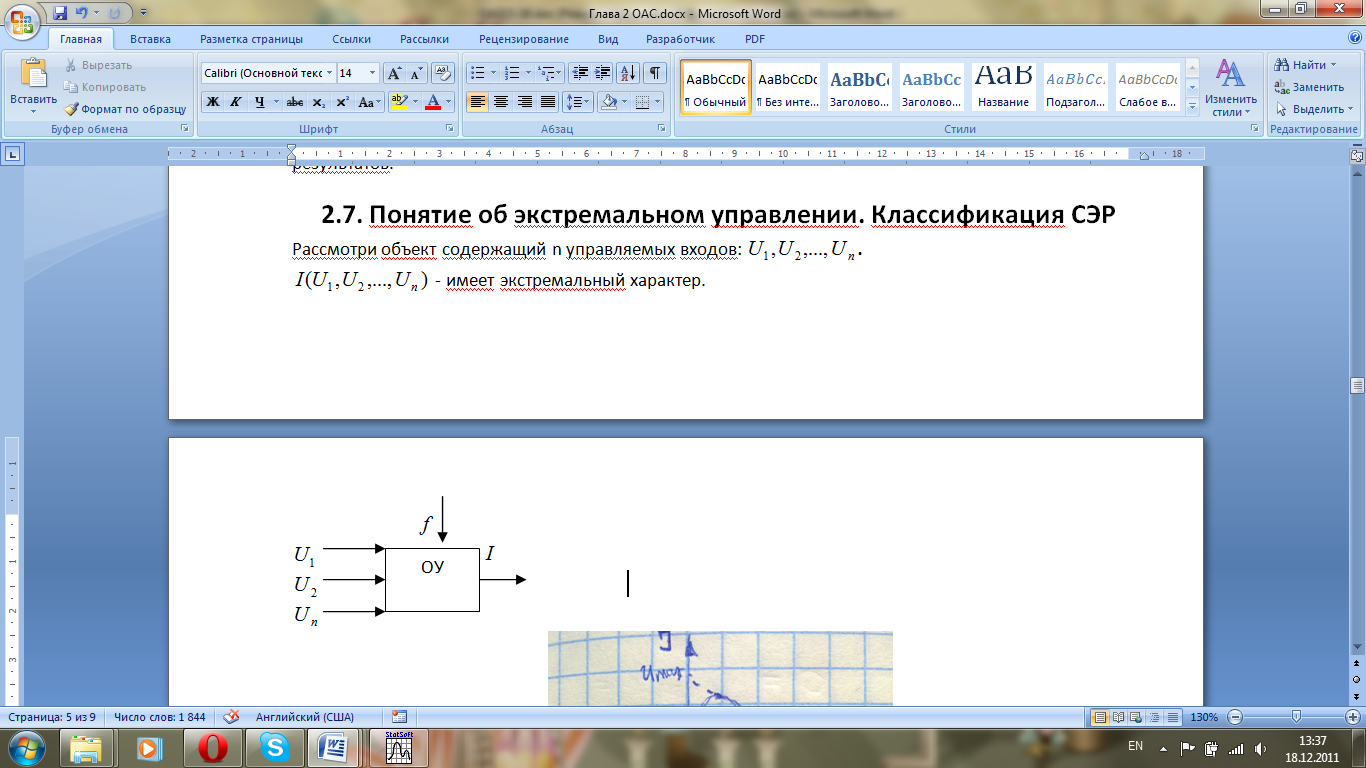 ЭР
– поисковые системы, работают в условиях
малого количества априорной информации
об объекте. Зато имеется возможность
непосредственного измерения текущего
значения критерия эффективности. Процесс
поиска состоит в периодической подаче
пробных воздействий на объект и анализ
их результатов.
ЭР
– поисковые системы, работают в условиях
малого количества априорной информации
об объекте. Зато имеется возможность
непосредственного измерения текущего
значения критерия эффективности. Процесс
поиска состоит в периодической подаче
пробных воздействий на объект и анализ
их результатов.