

Глава 2. Общая характеристика адаптивных систем. Их классификация.
В общем случае задача синтеза СУ предполагает в качестве исходной информации данные о структуре и параметрах объекта, и о критерии управления. Если априорная информация достаточна я и точная, то с использованием методов теории оптимальных систем выполняется синтез управляющий частью системы, таким образом, чтобы обеспечить экстремальные значения критерия качества при заданной структуре и параметрах объекта.
На практике в большинстве случаев имеет место неполнота априорной информации об объекте. Отсюда адаптивные системы в процессе функционирования решают задачу доопределения недостающей информации объекта и соответствующей корректировке функции управления с учетом части СУ.
При рассмотрении адаптивных систем как правило предполагают выполненными 2 следующих допущения:
-
Адаптивное управление осуществляется в замкнутом пространстве в состоянии управляемого объекта и коэффициентов в уравнении этой СУ. Вопросы выведения объекта на расчетный режим не рассматриваются на этом этапе, и предполагается это рассмотрение при изучении теории оптимального управления.
-
Нестационарный объект заменяется на квазистационарный на вполне ограниченном интервале времени. Этот период времени так же называется квазистационарным. Предполагается, что периоды квазистационарности достаточны для завершения процесса адаптивной настройки системы. Другими словами процессы настройки в системе протекают быстрее, чем процессы изменения параметров объекта.
При проектировании адаптивных систем необходима такая информация:
-
Характеристика структуры связей управляемой частью системы объекта. При этом возможны случаи:
-
Структура связей полностью известна.
-
Структура связей известна частично.
-
Структура связей не известна.
-
Характеристика параметров модели объекта. Здесь возможны такие случаи:
-
Известны номинальные значения параметров и диапазоны их отклонения от номинальных.
-
Информация о параметрах модели полностью отсутствует.
-
Оценка влияния и характеристика возмущений на объект:
-
Возмущения доступны прямому измерению с помощью датчиков.
-
Известны законы распределения вероятностей возмущающих величин.
-
Информация, т.е. сведенья о возмущениях полностью отсутствуют.
-
Характеристика возможностей прямых измерений физических параметров управляемого процесса. В том числе:
-
Непрерывные измерения.
-
Циклические
-
Одноразовые, эпизодические.
В зависимости от количества указанной информации применяется тот или иной подход или метод к построению адаптивной системы. При этом в любом случае необходимость построения адаптивной системы обусловлена априорной неопределенностью объекта, т.е. недостаточностью информации.
Определим понятие априорной неопределенности.
Н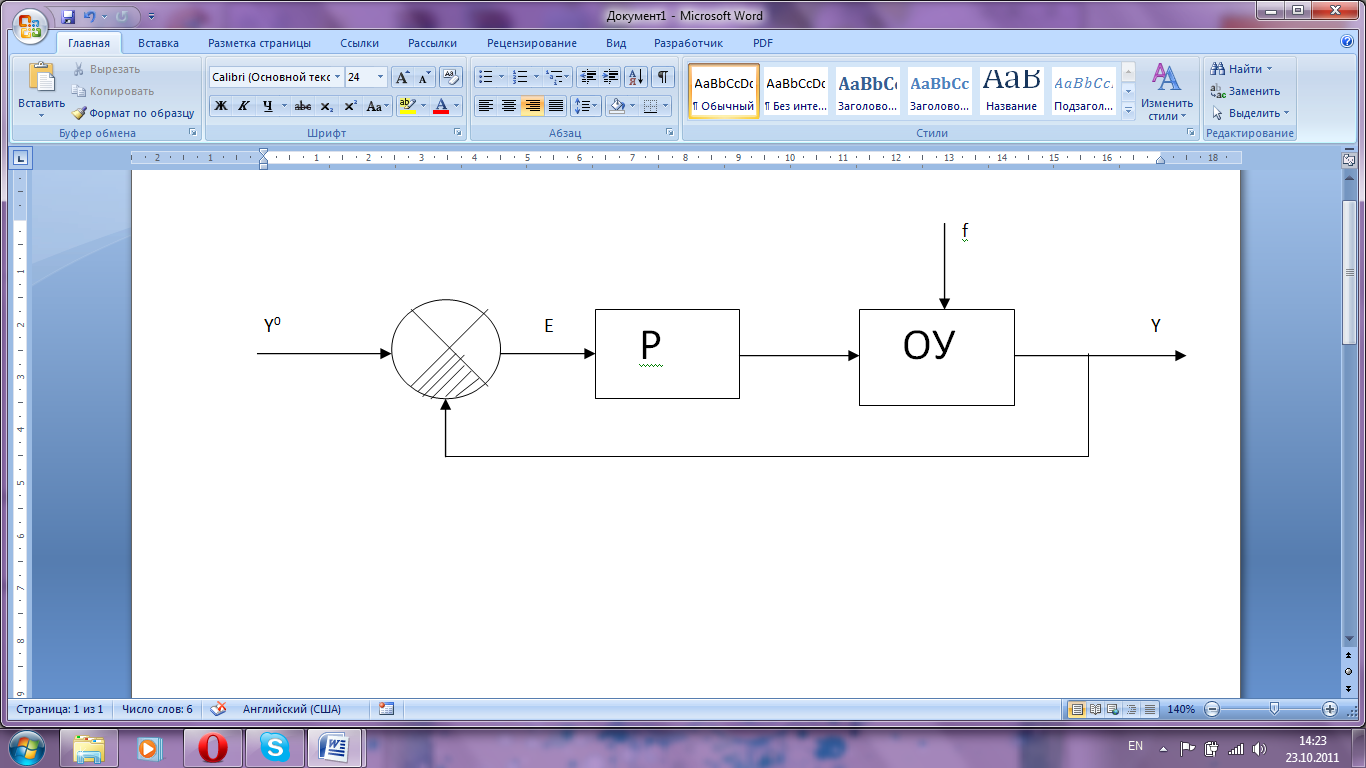 а
рисунке приведено изображение обычного
контура управления объектом при
использовании регулятора P
с определенным запасом регулирования
в виде априорной неопределенности.
а
рисунке приведено изображение обычного
контура управления объектом при
использовании регулятора P
с определенным запасом регулирования
в виде априорной неопределенности.
Для задач адаптивного управления наиболее интересны случаи, когда входные воздействия (y0, f) для системы изменяются во времени, т.е. система является не стационарной (квазистационарной). В зависимости от характера и объема недостающей информации об объекте и наличии внешних воздействий (неконтролируемых) различают:
-
Адаптацию, обусловленную неопределенностью знаний (отсутствие измерения) (y0, f).
-
Адаптацию, вызванную неопределенностью информации об объекте.
-
Адаптацию, вызванную одновременно неопределенностью по пунктам 1 и 2.
Имеется классификация адаптивных систем по функциональному признаку в следующем:
-
Если в процессе работы системы целенаправленно изменяются параметры управляющей части (регулятора), то такая нотация или адаптивная система называется самонастраивающейся.
-
Если в процессе работы системы целенаправленно изменяется структура управляющей части, то такая отдельная система называется самоорганизующейся и при этом могут изменяться параметры.
-
Если адаптивная система изменяет свои параметры, структуру и алгоритм функционирования управления, то она называется самообучающейся.
Рассмотрим классификацию адаптивных систем по двум признакам:
-
По сложности ОУ и количеству априорной информации о нем. Классификацию изложим в виде таблицы.
|
Сложность |
Количество априорной информации |
||
|
Много |
Средне |
Мало |
|
|
Простой |
1.1 |
1.2 |
1.3 |
|
Средний |
2.1 |
2.2 |
2.3 |
|
Сложный |
3.1 |
3.2 |
3.3 |
1.1, 1.2, 2.1, 2.2 – решение ищется в классе СНС (самонастраивающиеся системы).
1.3, 2.3 – системы экстремального регулирования (СЭР).
3.1, 3.2 – самоорганизующиеся системы (СОС).
2.3, 3.2, 3.3 – системы с обучением.