

2.10. Градиентные методы поиска экстремума
В этих методах направление движения совпадает с вектором градиентом при поиске макс и противоположно ему при поиске мин.
Градиент функции в точке есть вектор, поправленный в сторону наискорейшего ее возрастания
g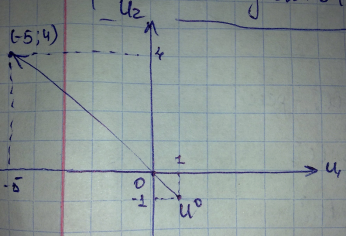 rad
J
rad
J![]() ={
={![]()
![]() …
…![]() }
}
Все градиентные методы различаются способом выбора длины шага , однако шаг всегда выполняется в направлении вектора grad
Что бы выдержать это поправление шаг по каждой координате должен быть пропорционален соотв. составляющей вектора grad
![]()
![]() ,i=
,i=![]()
Для реализации этого алгоритма на каждой итерац. требуется оценивать сост. вектора grad. Это можно делать пробными воздействиями по каждой коорд.
![]()
Рассмотрим след метод оценки сост. градиент.
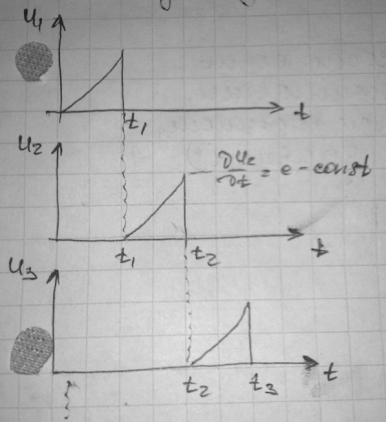
На входы подаются воздействия вида:
![]()
В конкретный момент времени в последнем выр. все слагаемые кроме одного равны 0.
Например
на интервале
![]()
![]()
2.11. Экстремальное управление в условиях помех.
На практике имеют место случаи, когда выход объекта управления зашумлен.
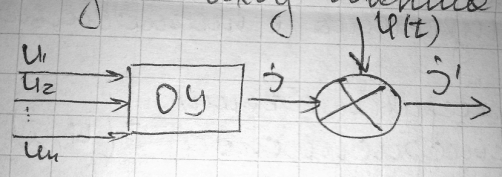
![]()
Предполагается, что U(t) центрированный ССП с огранич. дисперсией и неизвестными характеристиками.
Задача экстримального упр в условиях измерения выхода с помехой сост. в след:
![]() (1)
(1)
Для решения этой задачи может применятся рассмотренный ранее метод:
![]()
Этот
метод обеспечит решение задачи (1), если
величина
![]() и
и
![]()
удовл условиям:
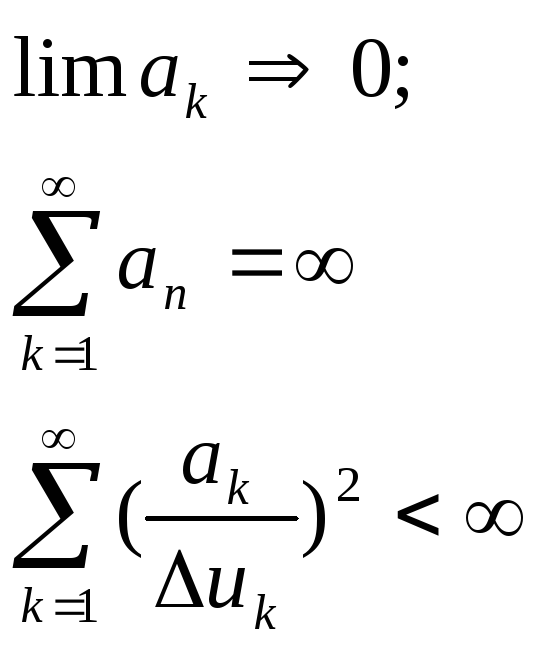 (2)
(2)
Выполнение условия (2) сост суть метода стохастич аппроксимации.
На практике используются соотнош., обеспечивающее выполнение условий (2).
2.12. Идентификационные алгоритмы экстремального управления
Процесс поиска ускорится если структура мат модели объекта известна с точностью до параметров.
Пусть
имеется одномерный объект с экстремальной
характеристикой
![]() ,
,
![]() – неизвестный
параметр.
– неизвестный
параметр.
Структура
функции
![]() – известна.
– известна.
Если
бы было известно значение
![]() ,
то задача
,
то задача
![]() (1)
(1)
сводилась бы к решению уравнения:
![]() (2)
(2)
Таким образом любой идентификац. алгоритм сост из 3х этапов:
1
По результатам измерений пар
![]() определяются параметры
определяются параметры
![]()
2 Решается задача (2)
3 Найденное оптимальное U выдается на объект.
Пример: рассмотрим процедуру вычисления экстремума ф-и вида кривой Гаусса по 3 замерам.
![]()
U*=М - оптимальное значение М.
Для определения U*=М разделим первое ур на второе , а второе на третье:
 Прологарифмируем
уравнение:
Прологарифмируем
уравнение:
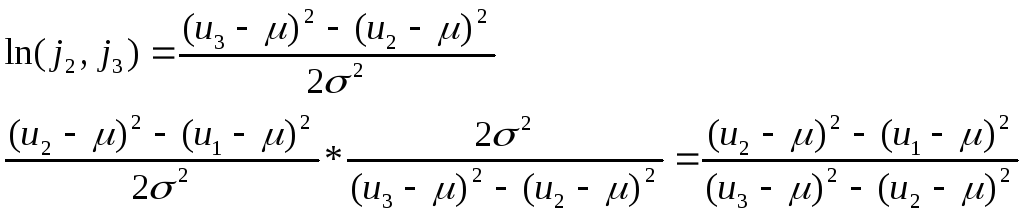
Из последнего уравнения выражаем параметр М
U*=![]()
2.13. Динамические режимы работы систем экстремального регулирования. Показатели качества экстр систем
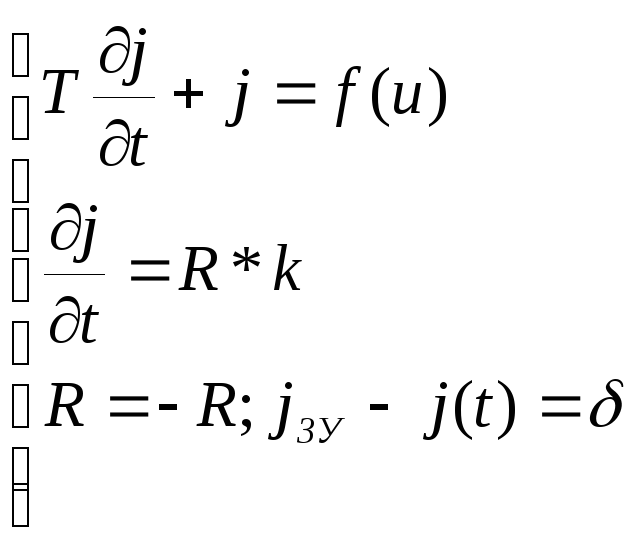
В определенных случаях инерцией ОУ пребречь нельзя, при этом уравн. описывающие обьект является не алгебраическим а дифференциальным. Инерциональные экстремальные объекты могут иметь 1 из след структур :
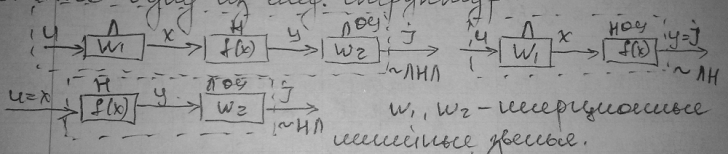
f(x)- безинерционное нелинейное звено с экстремальной характеристикой.
Инерционность на входе w1 обусловлена в основном инерционностью исполнительного механизма. А инерциональность выхода w2 определяется непосредственно динамикой обьекта и средств сбора инф.
Рассмотрим систему экстремального управления объектом типа НЛ.

В УУ реализуется процесс экстрем. поиска с запоминанием экстремума.
ИМ перемещ. с постоянной скоростью .
В прямом поправлении, когда R=+1 или в обратном R=-1
Управление ОУ имеет вид :
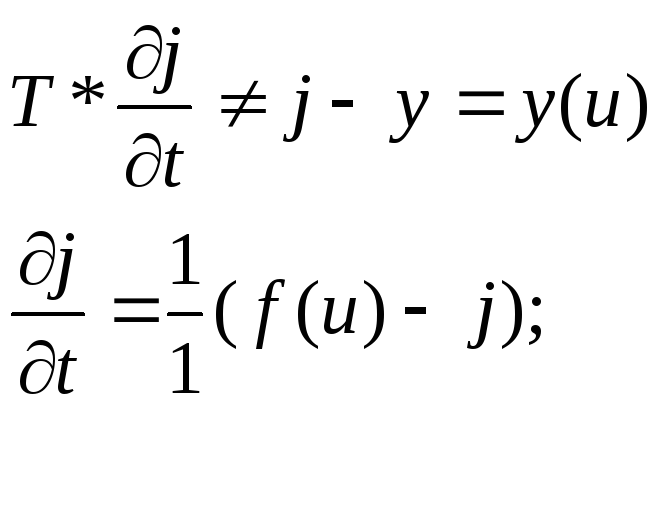 (1)
(1)
![]() (2)
k-
скорость изменения исполнительного
механизма.
(2)
k-
скорость изменения исполнительного
механизма.
Из уравнений (1,2) исключим dt, и получим ур-ния фазов. траекторий
![]()
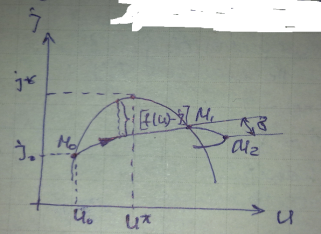 (3)
(3)
Фазовая траектория М0-М1 не совпадает со статистической характеристикой f(u), и в соотв с уравнением (3) тем ниже, чем больше k и Т.
В
точке М1![]() =j
=j
![]()
В системе управления произойдет реверс при выполнении условия:
![]()
![]() если
если
![]() (4)
(4)
Рассмотрим временные диаграммы работы системы с запоминанием экстремума:
Ч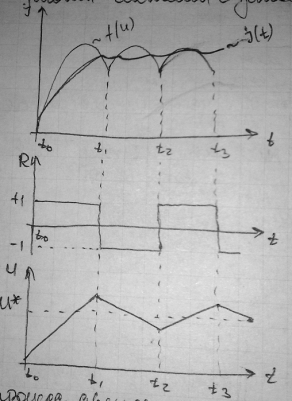 ерез
некоторое время после выхода системы
в экстремум в ней наблюдаются колебания
в районе экстремума.
ерез
некоторое время после выхода системы
в экстремум в ней наблюдаются колебания
в районе экстремума.
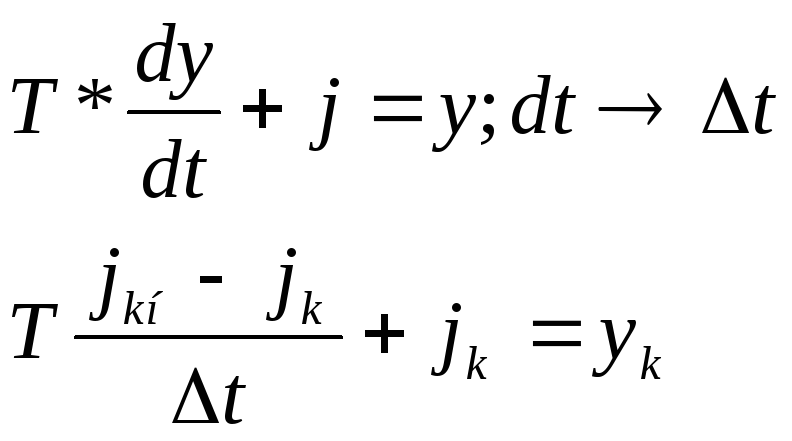
Процесс
движения системы
![]() опред путем решения СУ:
опред путем решения СУ:
Обычно более наглядно процесс движения к экстремуму изображ. На фазовой плоскости
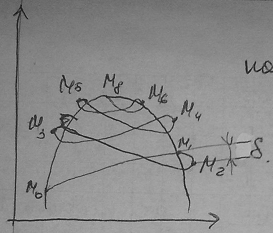
В. т. М2, М4, М6, М8 происходит реверс, т.е. переключение.
Уравнение фазовых траекторий получается путем решения ДУ:
![]()
![]()
 если
если
![]()
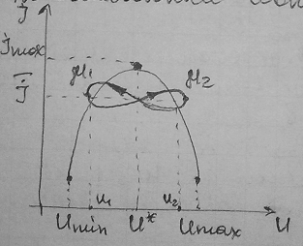
После выхода системы к экстремуму устанавливается автоколебание.
М1,М2 – точки переключения
Показатели работы системы экстремального регулирования:
-
Время выхода системы в область экстремума - время движения системы от края рабочего диапазона до установ. автоколебаний .
-
Потери на поиск – разность между Jmax и средним значением критерия в уст режиме.
![]()
-
Амплитуда уст колебаний

Для определения оптимальных значений параметров управляющей части системы необходимо выполнить расчет переходных процессов в системе экстремального регулирования.
Н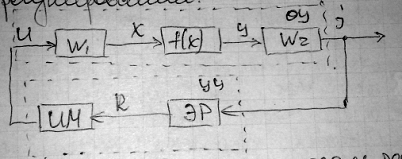 аиболее
общим методом расчета процессов в
системе являются численные методы
аиболее
общим методом расчета процессов в
системе являются численные методы
Задав
начальные условия на инерционных
элементах (![]() )
с использованием разностных уравнений
рассчитывается процесс в системе для
k=1,2…
)
с использованием разностных уравнений
рассчитывается процесс в системе для
k=1,2…
По нему определяются показатели качества .