

2.7. Понятие об экстремальном управлении. Классификация сэр
Р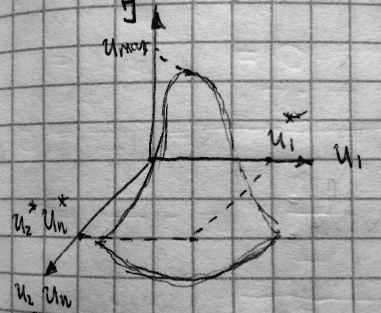 ассмотри
объект содержащий n
управляемых входов:
ассмотри
объект содержащий n
управляемых входов:
![]() .
.
![]()
 -
имеет экстремальный характер.
-
имеет экстремальный характер.
Задача
состоит в поиске и поддержании таких
значений входов (![]() )
при которых критерий имеет экстремальное
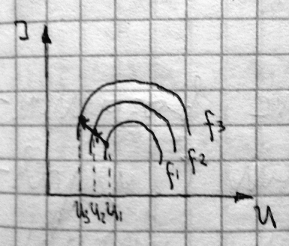
значение. Задача усложняется тем, что
на объект действуют возмущения
)
при которых критерий имеет экстремальное
значение. Задача усложняется тем, что
на объект действуют возмущения
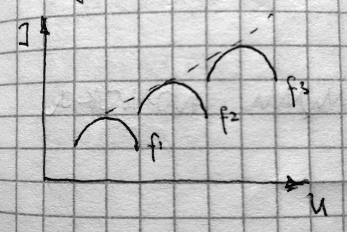
![]() вызывающие дрейф характеристики.
вызывающие дрейф характеристики.
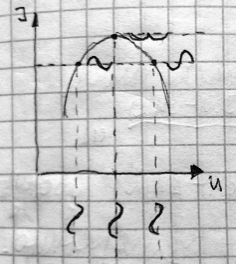
Для одномерного случая дрейф характеристики иллюстрируется рисунком:
![]()
Классификация СЭР:
1. По количеству управляющих переменных:
- одномерные
- многомерные
2. По количеству экстремумов:
- одноэкстремальные
- многоэкстремальные
3. По динамическим свойствам объекта управления:
- статические
- динамические
4. По количеству априорной информации об объекте(виды информации):
- о виде экстремальных характеристик.
- о динамических свойствах объекта.
- о характеристиках помех.
5. По способу организации поиска экстремума.
2.8. Методы нахождения экстремума однопараметрических объектов
1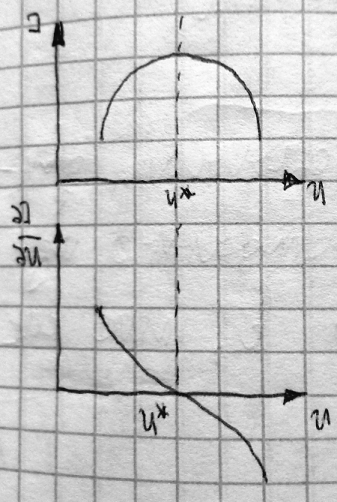 .
Метод измерения производной:.
.
Метод измерения производной:.
Основан
на том факте что в районе экстремума
![]() .
.
В
процессе движения системы измеряют
![]() и
и
![]() и находят
и находят
![]() /
/![]()
![]() =k
– const
=k
– const
![]()
2. Метод запоминания экстремума.
Ц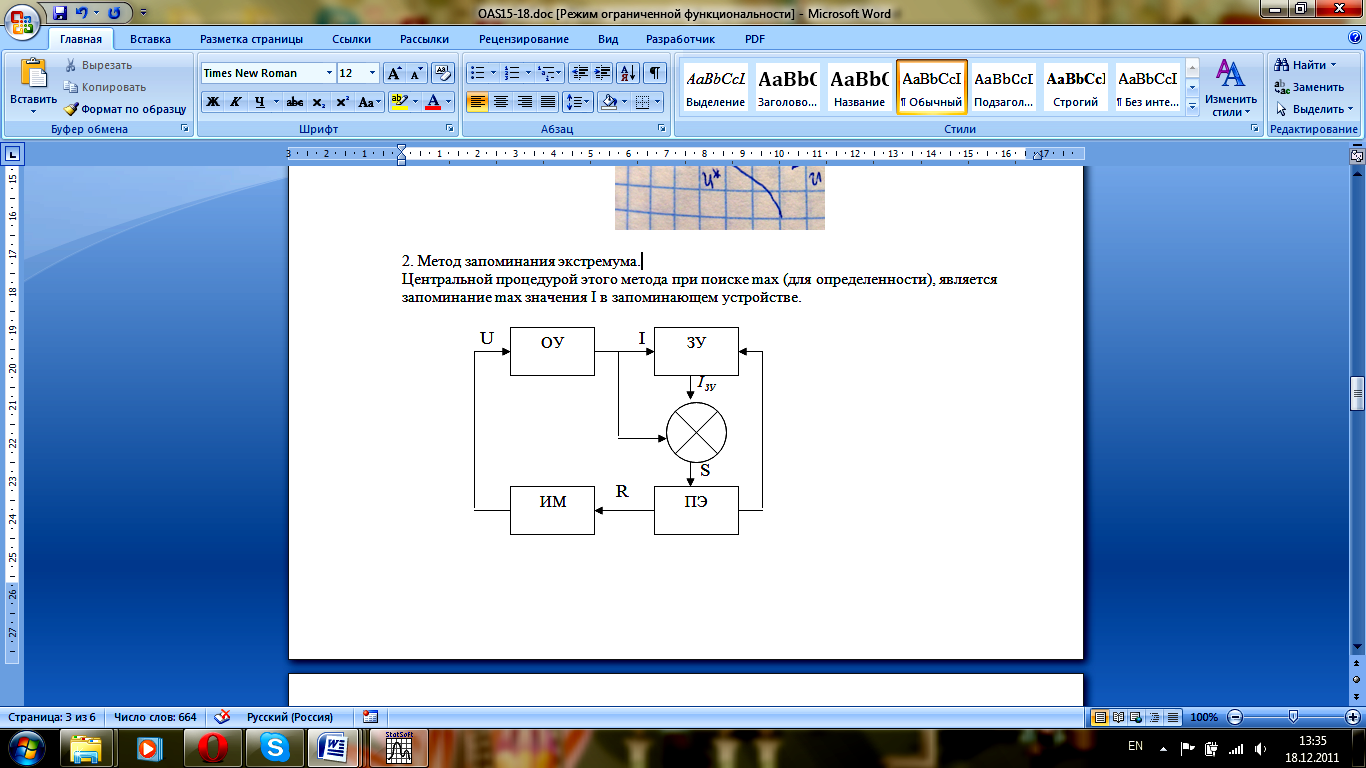
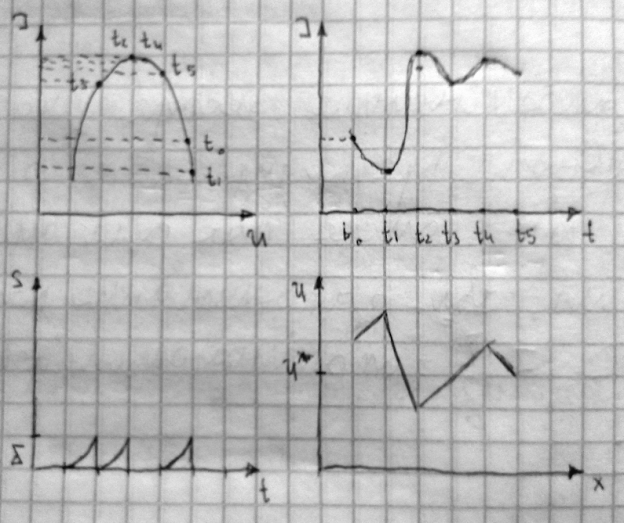 ентральной
процедурой этого метода при поиске max
(для определенности), является запоминание
max
значения I
в запоминающем устройстве.
ентральной
процедурой этого метода при поиске max
(для определенности), является запоминание
max
значения I
в запоминающем устройстве.
![]() ,
если
,
если
![]() -
ЗУ. Запоминающее устройство запоминает
текущее значение I
если I(t)
увеличивается.
-
ЗУ. Запоминающее устройство запоминает
текущее значение I
если I(t)
увеличивается.
R=-R,
если
![]() - ПЭ.
- ПЭ.
![]() -
зона нечувствительности.
-
зона нечувствительности.
![]() -
ИМ.
-
ИМ.
Такая
система находится в постоянном движении,
то есть
![]() постоянно изменяется со скоростью |R|=1
постоянно изменяется со скоростью |R|=1
3. Метод периодического поискового сигнала.
Основан на подаче входного периодического сигнала малой амплитуды:
Слева
от экстремума фазы входа и выхода
совпадают, справа – различаются на
![]() .
В районе экстремума сигнал I(t)
непериодический.
.
В районе экстремума сигнал I(t)
непериодический.
4. Коммутатор поверочных реверсов.
Если объект работает в условиях интенсивных помех, вызывающих дрейф характеристики ложные срабатывания. В этих случаях через определенное время система безусловно реверсирует (поверочный реверс).
2.9. Поисковые шаговые алгоритмы экстремального управления одномерными и многомерными объектами
Вначале
рассмотрим объект с 1 входом
![]() .
.
![]() -
некоторый параметр характеристики.
-
некоторый параметр характеристики.
Приближенно
![]() (1)
(1)
Значения
![]() и
и
![]() доступны непосредственному измерению.
Поэтому
доступны непосредственному измерению.
Поэтому
![]() оценивается по выражению 1.
оценивается по выражению 1.
В
основе поискового алгоритма обычно
используется метод градиента
![]() (2)
(2)
а
– некоторый параметр.
![]() - в зависимости от вида экстремума.
- в зависимости от вида экстремума.
Поскольку
подача пробных воздействий
![]() требует
времени Т, управление осуществляется
по шагам k=0,1,2
… . Тогда выражение 2 в дискретном виде
следующее:
требует
времени Т, управление осуществляется
по шагам k=0,1,2
… . Тогда выражение 2 в дискретном виде
следующее:
![]() (3)
(3)
![]() -
параметр шага.
-
параметр шага.
Если
![]() мал система долго выходит в район
экстремума, если велик, совершает
колебания с большой амплитудой при
удержании экстремум. Обычно
мал система долго выходит в район
экстремума, если велик, совершает
колебания с большой амплитудой при
удержании экстремум. Обычно
![]() адаптивно настраивается:
адаптивно настраивается:
![]()
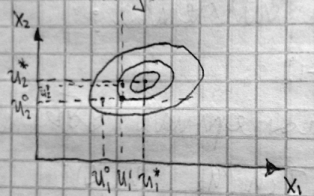
Рассмотрим
многомерный объект с характеристикой
![]()
Методы поиска экстремума делятся на 2 группы – градиентные и неградиентные. Среди неградиентных методов на практике распространен метод спуска по координатам.
Движение
начинается из некоторой начальной точки
с известными координатами
![]()
1.
![]() по
по
![]() ,
,
![]() - результат.
- результат.
![]() по
по
![]() ,
,
![]() - результат.
- результат.
![]() по
по
![]() ,
,
![]() - результат.
- результат.
![]()
2.
![]() по
по
![]() ,
,
![]() - результат.
- результат.
![]() по
по
![]() ,
,
![]() - результат.
- результат.
и т.д.
Таким образом метод состоит в последовательном повторении одномерного поиска по всем n координатам.