

2.11. Методи відновлення несучої частоти
Для відновлення несучої частоти в приймачах сигналів з ОБС найбільш часто застосовують один із трьох методів, сутність яких пояснюється схемами, зображеними на рис. 2.15, 2.16, 2.17.
1. Використання як відновленої несучої сигналу місцевого ОГ G2 (рис. 2.15). За такого методу ставляться найбільш жорсткі вимоги до стабільності і точності початкової установки частоти генераторів G1 і G2, а також відповідної настройки генераторів передавача. Ефект Допплера в цій схемі не враховується і призводить до додаткового асинхронізму. Перевагою даного методу є простота функціональних схем.

Рис. 2.15. Відновлення несучої за допомогою
місцевого опорного генератора
2. Безпосереднє використання як відновленої несучої пілот-сигналу після його виділення (фільтрації) і підсилення (рис. 2.16).
Фільтр пілот-сигналу (ФПС) забезпечує виділення пілот-сигналу (залишку неподавленої несучої) і подавлення сигналу ОБС. Врахування нестабільності й ефекту Допплера змушує збільшити смугу ФПС. При цьому погіршується завадостійкість тракту пілот-сигналу. Це призводить до необхідності збільшення потужності пілот-сигналу, а отже, і до додаткових енергетичних витрат.

Рис. 2.16. Відновлення несучої за пілот-сигналом
3. Використання пілот-сигналу для підстройки місцевого ОГ (рис. 2.17). Цей метод поєднує у собі переваги першого і другого методів. Пілот-сигнал і сигнал ОГ G2 порівнюють за частотою в системі АПЧ. За наявності взаємного розстроєння управляючою напругою підстроюється генератор G1. На величину розстроєння змінюється частота пілот-сигналу й ОБС, тобто не ОГ підстроюється під частоту пілот-сигналу, а частота пілот-сигналу і сигналу ОБС підстроюється до частоти ОГ. Це призводить до зменшення асинхронізму.

Рис. 2.17. Використання пілот-сигналу для
підстроювання місцевого опорного генератора
Такий метод дозволяє використовувати ФПС з вузькою смугою, тому що зміна частоти пілот-сигналу усувається з точністю, визначеною характеристиками системи АПЧ.
2.12. Особливості роботи системи автоматичного регулювання підсилення під час приймання сигналів з однією бічною смугою
Під час передавання сигналів з ОБС із подавленою несучою в паузах мови сигнал не передається і на вході приймача він відсутній. У цьому випадку система АРП переводить приймач у режим максимального підсилення. Перші елементи сигналу після паузи перевантажують приймальний тракт і відтворюються зі спотвореннями. Для уникнення цього явища і забезпечення роботи системи АРП використовують пілот-сигнал. За пілот-сигналом встановлюється необхідне підсилення приймального тракту в паузах мови. За наявності ОБС АРП працює паралельно від пілот-сигналу і сигналу ОБС (на рисунках канал АРП по ОБС не зображено).
У зв'язку з використанням пілот-сигналу для системи АРП, навіть за автономного методу відновлення несучої використовують односмугову передачу з послабленою чи повною несучою.
2.13. Методи демодуляції сигналів за амплітудної і частотної маніпуляції
Обробка сигналів з амплітудною і частотною маніпуляцією здійснюється на проміжній частоті. У разі приймання сигналів з АМн детектування і виділення обвідної, яка відповідає модулюючому сигналу, не здійснюється. Приймання сигналів з АМн відбувається, як правило, на слух. Тому прийняті струмові посилки перетворюються з сигналів проміжної частоти в сигнали звукової частоти. Функціональну схема, що пояснює принцип демодуляції сигналів з АМн, і відповідні часові діаграми зображено на рис. 2.18.
Сигнал з АМн на проміжній частоті з виходу ППЧ подається на один вхід Зм. На інший вхід Зм надходить напруга від гетеродина G. Частота сигналу гетеродина ƒГ вибирається такою, щоб різниця частот ƒПР – ƒГ = ƒЗВ лежала в області звукових частот ƒЗВ. Струмові посилки звукової частоти виділяються на виході Зм і після підсилення (ПЗЧ) подаються на телефони.
Для демодуляції сигналів з ЧМн в авіаційних засобах зв'язку використовують чотири типи схем демодуляторів:
– двоканальний фільтровий демодулятор;
– двоканальний демодулятор з перетворенням частоти в каналах;
– демодулятор, який використовує дискримінатор з розстроєними контурами;
– цифровий демодулятор.
Частіше використовується двоканальний фільтровий демодулятор. Функціональна схема і часові діаграми, що пояснюють принцип роботи демодулятора, зображені на рис. 2.19.
Сигнал проміжної частоти подається на обмежувач, що усуває спотворення амплітуди сигналу, які з'явилися в лінії зв'язку через зміни умов розповсюдження і наявність завад.

а
б
Рис. 2.18. Функціональна схема (а) і часові діаграми (б)
демодуляції сигналів АМн
Смуговий фільтр Ф1 настроєний на частоту струмових посилок (частоту натискання ƒ1), а смуговий фільтр Ф2 – на частоту безструмових посилок (частоту відтискання ƒ2). Смуга пропускання кожного фільтра не перевищує розносу частот ЧМн сигналу. Частотні характеристики фільтрів зображені на рис. 2.19, б. Фільтри забезпечують поділ сигналу з ЧМн на два сигнали з АМн. У кожному каналі сигнали детектуються амплітудними детекторами (АД1; АД2) і подаються на підсилюючий пристрій. На його виході відеоімпульси мають подвоєну (порівняно з виходом кожного каналу) амплітуду. Далі сигнали подаються на формувач, який забезпечує підвищення якості (покращення форми й усунення спотворень, що накопичилися) інформаційного сигналу. Потім після підсилення отримана послідовність імпульсів подається на кінцеву апаратуру. За невеликих рознесень частот сигналів з ЧМн використовуються демодулятори з частотним дискримінатором на розстроєних контурах.
Функціональна схема такого демодулятора зображена на рис. 2.20, а. Призначення основних елементів схеми було описано під час розгляду принципу роботи двоканальних демодуляторів.
Принципова схема частотного дискримінатора на двох розстроєних контурах зображена на рис. 2.20, б. Контур L1, C1 настроєний на частоту 153 кГц, а контур L2, С2 – на частоту 103 кГц. Середня частота дорівнює 128 кГц. Дискримінатор забезпечує демодуляцію ЧМн сигналів з девіацією 3 кГц.
Функціональна схема двоканального демодулятора з перетворенням частот у каналах зображена на рис. 2.21. Сигнал з ЧМн після підсилення й обмеження надходить паралельно на входи Зм1 і Зм2. Частоти сигналів генераторів GI і G2 (ƒГ1 і ƒГ2 відповідно) вибираються таким чином, щоб комбінаційні складові на виході мали рівні частоти:
ƒГ1 – ƒ1 = ƒПР; ƒ2 – ƒГ2 = ƒПР.
На виході Зм у кожному каналі встановлені однакові ФНЧ з частотою зрізу Fзр. Ці фільтри не повинні пропускати комбінаційних складових, які утворюються посилками протилежного значення. Тому величина зрізу повинна вибиратися з наступних умов:
 Fзр
<
Fзр
<
![]()
або  Fзр
<
Fзр
<![]() .
.

а

б

в
Рис. 2.19. Функціональна схема (а), частотні характеристики (б) і часові діаграми (в), що пояснюють роботу демодулятора

а

б
Рис. 2.20. Функціональна схема демодулятора (а);
принципова схема частотного дискримінатора (б)

Рис. 2.21. Функціональна схема двоканального демодулятора
Далі сигнали так само, як у двоканальному фільтровому демодуляторі, подаються на АД1, АД2, схему віднімання, формувач Ф і підсилювач П. Як приклад можуть бути обрані такі значення параметрів демодулятора:
f1 = 138 кГц; f2 = 118 кГц;
fг1 = 148 кГц; fг2 = 108 кГц;
fпр = 10 кГц; fзр = 18 кГц.
Функціональна схема цифрового демодулятора сигналів з ЧМн зображена на рис. 2.22.

Рис. 2.22. Функціональна схема цифрового демодулятора сигналів з ЧМн
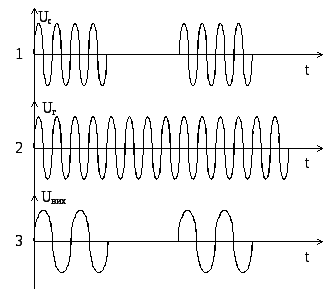
Часові діаграми, що пояснюють принцип роботи схеми, зображені на рис. 2.23 і 2.24. Сигнал проміжної частоти підсилюється ППЧ і перетворюється в сигнал низької частоти ƒC (ƒн чи ƒв), що забезпечує зручність і високу точність виміру частоти: ƒс – середня частота сигналу, ƒВ та ƒН – частоти, що відповідають одиничним і нульовим елементарним посилкам відповідно. Потім сигнал надходить на схему цифрового частотного дискримінатора. У цій схемі здійснюється порівняння поточного періоду несучої частоти сигналу ƒВ чи ƒН з середньою частотою сигналу та використовується цифровий метод виміру періоду проходження.
Сигнал з частотою ƒН чи ƒВ (рис. 2.23, а) підсилюється (П), обмежується за амплітудою і з нього формуються (Ф1) однополярні прямокутні імпульси (рис. 2.23, б; рис. 2.24, а) з періодом Тн = 1/ƒн чи Тв= 1/ƒв і тривалістю Тн/2 чи Tв/2. Ці імпульси надходять на схему збігу. На інший вхід схеми збігу подаються тактові імпульси від генератора ГТІ1 з періодом ТТАКТ (рис. 2.24, б). На вихід схеми збігу проходить число імпульсів, яке відповідає періоду проходження сигналу (рис. 2.24, в); nВ = ТВ/(2ТТАКТ) чи nН = ТН/(2ТТАКТ). Ці імпульси подаються на лічильник Лч1. Кількість розрядів лічильника обрано так, що він цілком заповнюється числом імпульсів, які відповідають середній частоті сигналу ƒсер. Отже, якщо береться сигнал з частотою ƒН < ƒс, то лічильник переповнюється, тому що nН > nс і на його виході з'явиться імпульс (рис. 2.24, г).
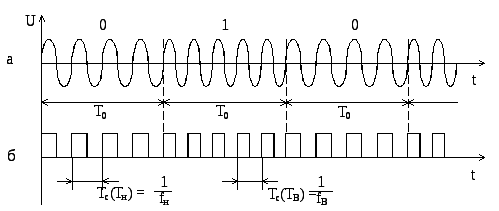
Рис. 2.23. Часові діаграми роботи цифрового демодулятора з ЧМн

Рис. 2.24. Часові діаграми роботи цифрового демодулятора з ЧМн
Якщо береться сигнал із частотою ƒв > ƒс, то лічильник не переповнюється і сигнал на його виході відсутній. Вимірювання виконується в межах кожного періоду частоти сигналу, тобто за тривалістю одного елемента сигналу Т0 під час приймання сигналів з частотою ƒн на виході лічильника Лч1 повинно бути число імпульсів Кн = Т0/Тн. Через нестабільність частоти і спотворення сигналу реальне число імпульсів у межах елемента Т0 буде менше. Імпульси з виходу лічильника Лч1 (рис. 2.25, б) подаються на схему збігу 2, де за допомогою імпульсів генератора ГТН2 (рис. 2.24, а) "нарізаються" тимчасові інтервали тривалістю, яка відповідає елементарним посилкам Т0. Лічильник Лч2 має кількість розрядів, котрі його заповнюють у разі надходження на його вхід протягом інтервалу Т0 кіськості імпульсів, рівного граничному значенню nГРАН > nН/2. Якщо число імпульсів, що надходять на вхід лічильника Лч2 за інтервал Т0, більше граничного, то на виході лічильника з'являється імпульс (рис. 2.25, в), що подається на схему формувача 2, і з нього формується елементарна посилка тривалістю Т0 і амплітудою, що відповідає частоті відтискання (нулю), наприклад, U0 (рис. 2.25, г).

Рис. 2.25. Часові діаграми роботи цифрового демодулятора з ЧМн
Для формування сигналів, що відповідають прийманню посилок з частотою ƒв > ƒс, служить другий канал. До його складу входять лічильники Лч3 і Лч4. Число розрядів лічильника Лч3 обрано так, що він цілком заповнюється числом тактових імпульсів, яке відповідає частоті:
![]() >
fB.
>
fB.
Отже, якщо береться сигнал з частотою ƒв, то лічильник переповнюється і на його виході з'являється імпульс. Але цей лічильник буде переповнюватися і під час приймання сигналів з частотою ƒн. Тому імпульси з лічильника Лч3 на лічильник Лч4 подаються через схему НЕ, що управляється імпульсами з лічильника Лч1. Якщо імпульси є на виході Лч1, то імпульс з виходу Лч3 не проходить. Далі робота каналу аналогічна.
Після формування імпульсів у каналах вони сумуються і через підсилювач подаються на вихід демодулятора. Синхронізація цифрових пристроїв демодулятора на схемі не показана.