

|
Глава 4. |
статистические МЕТОДЫ РАСПОЗНАВАНИЯ ОБРАЗОВ |
Основное внимание
в данной главе уделяется проблемам
синтеза и анализа алгоритмов распознавания
образов в условиях неполной информации
о вероятностных характеристиках классов.
Для преодоления априорной неопределённости
используются непараметрические оценки
условных плотностей вероятности
распределении признаков сигналов о
состоянии классифицируемых объектов.
Сигналом называют вектор входных
переменных
![]() .
Получаемые при этом алгоритмы распознавания
образов являются непараметрическими.
С учётом специфики непараметрических
алгоритмов распознавания образов
рассматриваются вопросы их оптимизации,
оценки эффективности и минимизации
описания как путём формирования наборов
информативных признаков сигнала, так
и с позиций алгоритмического подхода.
.
Получаемые при этом алгоритмы распознавания
образов являются непараметрическими.
С учётом специфики непараметрических
алгоритмов распознавания образов
рассматриваются вопросы их оптимизации,
оценки эффективности и минимизации
описания как путём формирования наборов
информативных признаков сигнала, так
и с позиций алгоритмического подхода.
4.1. Синтез байесовских решающих функций
Рассмотрим объект
(рис. 4.1) с входом
![]() ,
который может быть вектором
,
который может быть вектором
![]() ,
и выходом
,
и выходом
![]() – скаляр. Выходная переменная
– скаляр. Выходная переменная
![]() является дискретной случайной величиной.
является дискретной случайной величиной.

Рис. 4.1. Объект исследования.
Существует
некоторая неизвестная зависимость
между входом и выходом
![]() .
Необходимо оценить данную зависимость,
построив модель
.
Необходимо оценить данную зависимость,
построив модель
![]() .
.
Пусть дана выборка
![]() статистически независимых наблюдений
случайной величины
статистически независимых наблюдений
случайной величины
![]() ,
распределённых с неизвестной плотностью
,
распределённых с неизвестной плотностью
![]() ,
где
,
где
![]() – «указания учителя» о принадлежности
ситуации
– «указания учителя» о принадлежности
ситуации
![]() к тому либо иному классу
к тому либо иному классу
![]() .
.
Под классом понимается совокупность наблюдений, связанных между собой каким либо свойством или целью.
Необходимо
построить решающее правило
![]() ,
позволяющее в автоматизированном режиме
принимать решение о принадлежности
новых ситуаций
,
позволяющее в автоматизированном режиме
принимать решение о принадлежности
новых ситуаций
![]() к классам
к классам
![]() .
.
При наличии двух
классов
![]() (рис. 1) принимает значения
(рис. 1) принимает значения
![]() и
и
![]() .
Если классифицируемые объекты
характеризуются двумя признаками, то
двуальтернативная задача распознавания
образов иллюстрируется рис. 4.2,
где
.
Если классифицируемые объекты
характеризуются двумя признаками, то
двуальтернативная задача распознавания
образов иллюстрируется рис. 4.2,
где
![]() – разделяющая поверхность (решающая
функция) между классами
– разделяющая поверхность (решающая
функция) между классами
![]() и
и
![]() .
.
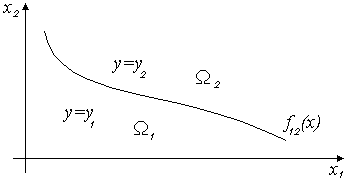
Рис. 4.2. Задача распознавания образов в двухмерном случае
Для последующего анализа построим плотности вероятности классов в одномерном случае (рис. 4.3).
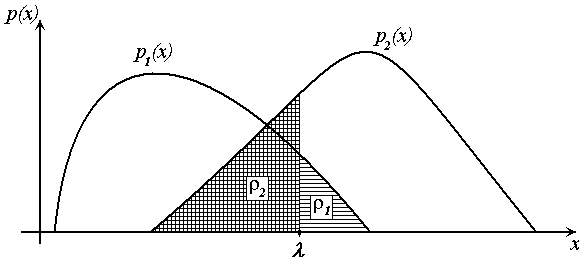
Рис. 4.3. Задача распознавания образов в одномерном случае
Определим
некоторую границу
![]() на оси
на оси
![]() и запишем решающее правило
и запишем решающее правило
Тогда ошибка распознавания первого класса составит
и для второго класса
 .
.
Общая ошибка
распознавания, например, при равенстве
априорных вероятностей классов
![]()
 .
.
Для определения
наилучшей границы найдём минимум
суммарной ошибки по параметру
![]()
![]() .
.
Возьмём производную
полученного критерия по параметру
![]() и приравниваем к нулю. Производная от
интеграла соответствует значению
подынтегрального выражения в точке
и приравниваем к нулю. Производная от
интеграла соответствует значению
подынтегрального выражения в точке
![]()
 .
.
В итоге получаем
![]() .
.
Оптимальная граница находится в точке пересечения двух классов. Полученная разделяющая поверхность между классами называется байесовской решающей функцией и имеет вид
![]() .
(4.1)
.
(4.1)
Исходя из этого, решающее правило будет иметь вид:
Решающее правило, соответствующее данной байесовской разделяющей поверхности, называется правилом максимального правдоподобия.
Далее рассмотрим
ситуацию когда, априорные вероятности
![]() классов разные. Пусть
классов разные. Пусть
![]() – общее количество наблюдений;
– общее количество наблюдений;
![]() – количество наблюдений первого класса;
– количество наблюдений первого класса;
![]() – количество наблюдений второго класса.
– количество наблюдений второго класса.

Рис. 4.4. Задача
распознавания образов для случая
![]()
Тогда частота появления точек первого и второго класса будет соответствовать
![]() .
.
Поэтому, если
![]() ,
то ошибка распознавания второго класса
будет больше, т.к. точки второго класса
появляются в области пересечения классов
чаще.
,
то ошибка распознавания второго класса
будет больше, т.к. точки второго класса
появляются в области пересечения классов
чаще.
Ошибка для первого класса определяется выражением
и для второго класса
 .
.
Исходя из этого, запишем суммарную ошибку
 .
.
Найдём минимум
суммарной ошибки по границе
![]() и получим байесовскую разделяющую
поверхность
и получим байесовскую разделяющую
поверхность
![]() .
(4.2)
.
(4.2)
Тогда решающее правило, соответствующее данной разделяющей поверхности, будет иметь вид
и называется правилом максимума апостериорной вероятности.