

-
Построение систем аэп с заданным статизмом
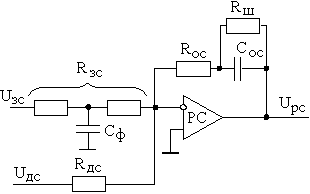
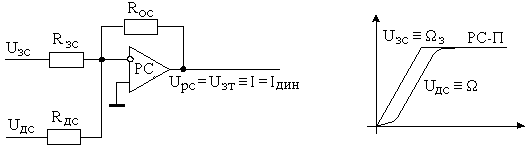
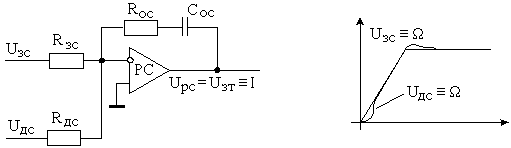
Фрагмент решающей цепи системы с заданным статизмом представлен на рисунке 5.36.
Рисунок 5.36
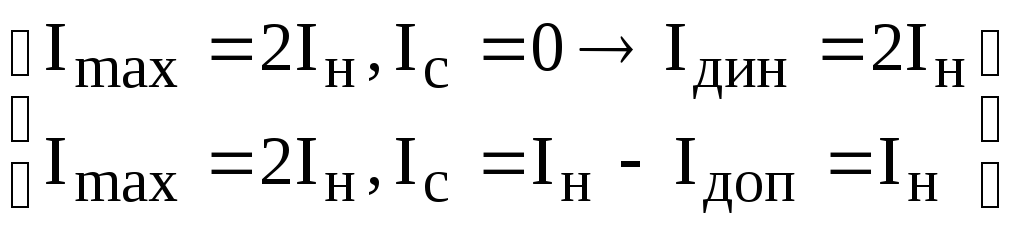
![]() ;
;
Rш = РС ПИ-типа
зс (со) = 0;
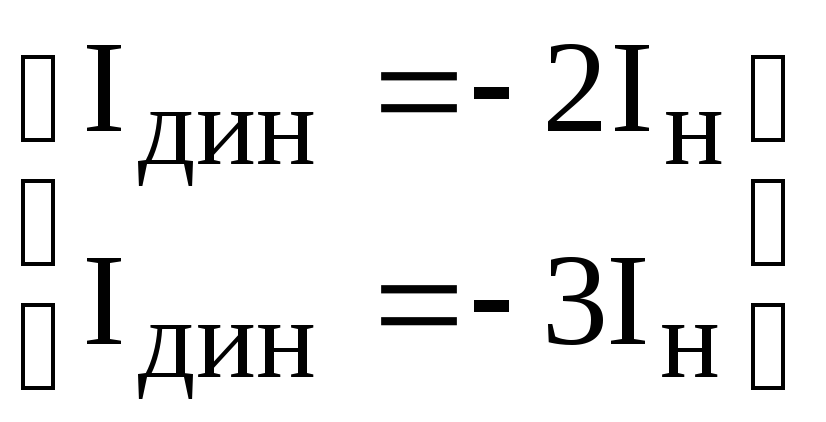
![]() .
.
-
Применение задатчика интенсивности на входе контура скорости
Без задатчика интенсивности динамический ток двигателя, определяющий темп изменения скорости зависит от величины статической нагрузки и режима работы привода (пуск, торможение).
Пуск: Iдин = Imах – Iс
Торможение: Iдин = – (Imax + Ic)
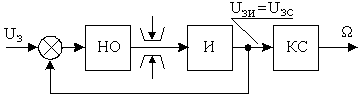
Для ограничения темпа изменения скорости, что требуется для ряда механизмов, на входе контура скорости (см. рисунок 5.37) устанавливается задатчик интенсивности (ЗИ), который определяет и задает величину динамического тока, поэтому его называют задатчиком динамического тока.
Рисунок
5.37
Рисунок
5.38
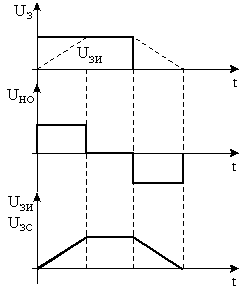
Диаграммы сигналов с ЗИ представлены на рисунке 5.38.
Задатчик интенсивности устанавливает величину динамического тока, поэтому полный ток двигателя определяется величиной нагрузки и режимом работы привода.
Iдин = (0,50,7)Iн;
Пуск:
I = Iдин
+ Ic
 ;
;
Ток двигателя при всех возможных нагрузках не выходит на уровень максимального.
Если темп ЗИ большой (Iдин>Iн), то при номинальной нагрузке привода этот темп отрабатываться не будет. РС выйдет на ограничение, задавая максимальный ток.
Торможение:
I = Iдин
+ Iс
-
Осциллограммы сигналов при пуске, торможении, реверсе с задатчиком интенсивности на входе регулятора скорости
Рисунок
5.39
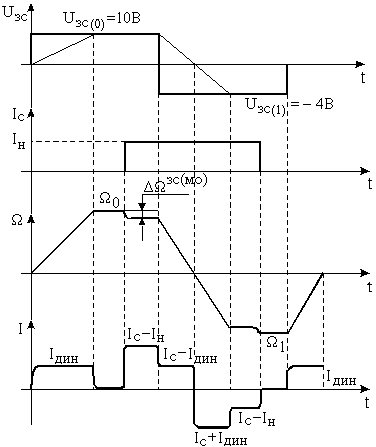
Iдин = 0,5Iн; Ic = Iн;
![]() .
.
На этапе торможения со статической нагрузкой на валу ток двигателя может не изменить своего знака и остаться того же направления.
Ic>Iдин.
Ток остается в двигательном режиме, тем самым удерживая излишне большой темп торможения, вызванный излишком нагрузки на валу.
-
Особенность работы привода с п- и пи-регуляторами скорости при наличии задатчика интенсивности на входе
С П-регулятором скорости система является астатической по заданию первого порядка (см. рисунок 5.40а). В переходных режимах существует ошибка регулирования по заданию, которая становится равна нулю только в установившемся режиме.
а)
б) Рисунок
5.40
Рисунок
5.41
-
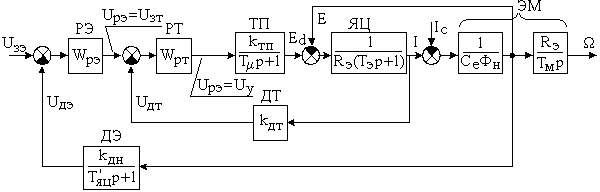
Однозонный эп с обратной связью по эдс
Обратную связь по ЭДС применяют в тех случаях, когда ЭП однозонный (Е ) и требования к поддержанию скорости не высоки.
Контур тока в расчете аналогичен системам с обратной связью по скорости. Структурная схема системы ЭП с отрицательной обратной связью по ЭДС представлена на рисунке 5.41, где принято обозначение: Тяц – постоянная времени того участка ЯЦ двигателя, к которому подключается датчик напряжения.