

-
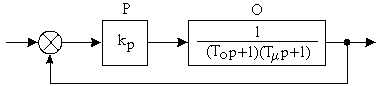
Применение п-регулятора для контура, объект которого содержит большую и малую инерционности
Применение П-регулятора оправдано, т.к. не требуется следить за емкостью, и будут отсутствовать узлы, шунтирующие емкость на стоянке привода.
Рисунок
5.10
![]() ;
;
![]() ;
;
![]() ;
;
2а0а2 = а12;
2(1+kpk0)Т0Т = (Т0 + Т)2;
kpk0 >>1 1+kpk0 kpk0;
T0 >> T T0 + T T0;
2kpk0T0T = T02;
![]() – коэффициент
П-регулятора как у ПИ-регулятора.
– коэффициент
П-регулятора как у ПИ-регулятора.
Передаточная функция регулятора
![]() .
.

![]() при
То
Т.
при
То
Т.
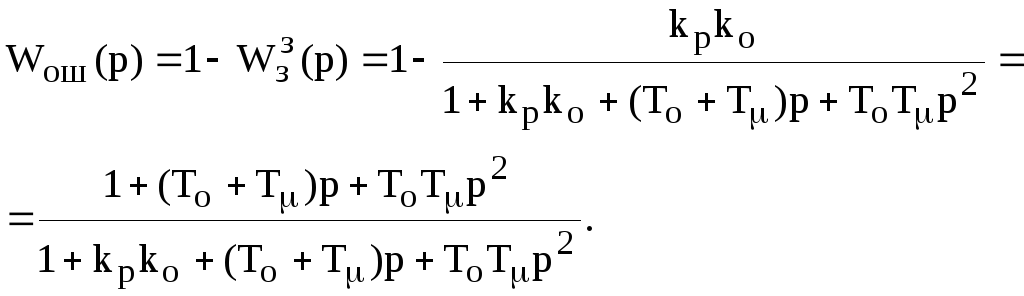
Т.к. передаточная функция замкнутого контура в данном случае будет практически такой же, как с применением ПИ-регулятора, то характер переходных процессов будет тот же самый.
УР:
 .
.
Замкнутый контур является статическим. Ошибка уменьшается по мере роста коэффициентов.
Ошибка может быть скомпенсирована за счет увеличения сигнала задания.
![]() ;
;
![]() ;
;
![]() ;
;
![]() .
.
При
соотношении
![]() применяют П-регулятор.
применяют П-регулятор.
-
Оптимизация контура на мо контура, объект которого имеет интегрирующее звено и звено с малой постоянной времени.
МО:
![]() ;
;
![]() – регулятор
П-типа.
– регулятор
П-типа.
С П-регулятором контур в общем случае является статическим. В некоторых случаях, если интегрирующее звено объекта находится до точки приложения возмущающего воздействия, контур будет астатическим.
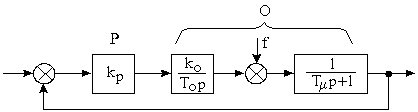
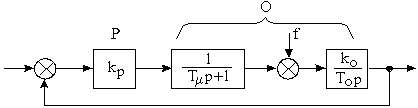
На рисунке 5.11а, б представлены контур астатический по возмущению и статическая система по возмущению, соответственно.
В обоих вариантах система является астатической по заданию, т.к. одно из звеньев имеет интегральную часть. При качественном анализе системы необходимо начинать со звена, имеющего интегральную часть, на котором в установившемся режиме должен быть ноль.
По возмущению астатической является только вариант а), т.к. в этом случае интегральная часть объекта стоит до точки приложения возмущающего воздействия. Вариант б) является статическим по возмущению, т.к. нулевой сигнал на входе интегрирующей части возможен при наличии возмущающего воздействия, т.е. ошибки.
а)
б)
Рисунок 5.11
-
Оптимизация контура на со, объект которого содержит интегрирующее звено и звено с малой постоянной времени
Применим ПИ-регулятор с передаточной функцией
![]() .
.
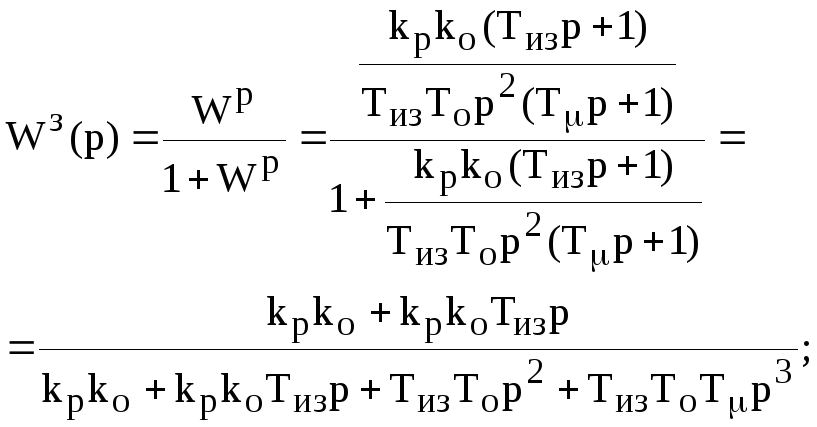
С ПИ-регулятором астатическим по заданию и возмущению передаточные функции разомкнутого и замкнутого контуров:
![]() ;
;
2а0а2 = а12 2kpk0ТизТ0 = kp2k02Тиз2 2Т0 = kpk0Тиз;
2а1а3 = а22 2kpk0Тиз2Т0Т = Тиз2Т02 2kpk0T = T0;
![]() ;
;
![]() ;
Тиз
= 4Т;
;
Тиз
= 4Т;
![]() .
.
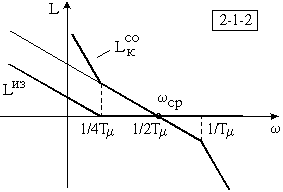
В соответствии с рисунком 5.12, ЛАЧХ разомкнутого контура получилась симметрично относительно частоты среза. Это настройка на симметричный оптимум.
![]() .
.
Рисунок
5.12
Рисунок 5.13
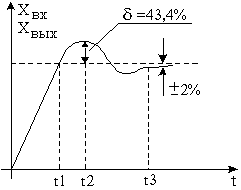
t1 = 3,1T; t3 = 16,5T; = 43,4.
Рисунок
5.14
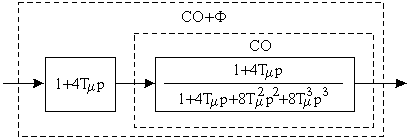
Передаточная функция фильтра
![]() ;
;
![]() .
.
График переходных процессов при различных настройках контура представлен на рисунке 5.15.
Рисунок 5.15
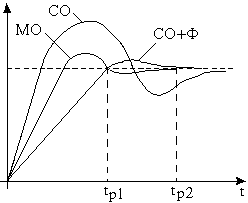
Таблица 5.1. Характеристики переходных процессов при различных настройках контура
|
|
СО |
МО |
СО+Ф |
|
, % |
43,4 |
4,3 |
8,1 |
|
t1 |
3,1Т |
4,3Т |
7,6Т |
|
t3 |
16,6Т |
8,4Т |
13,3Т |
Сравнивая настройку на СО и МО можно сделать вывод, что настройка на МО имеет малое перерегулирование и большое быстродействие, но при этом система является статической. Быстродействие и перерегулирование при оптимизации на симметричный оптимум (СО) вдвое хуже, чем при настройке на МО, но система становится астатической.
Перерегулирование с фильтром на входе снижается по причине замены скачка сигнала с выхода фильтра, т.е. на входе контура экспонентой.
Техническая реализация фильтра на входе системы представлена на рисунке 5.16.
Рисунок
5.16
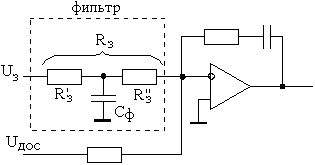
Применение ПИ-регулятора для объекта, содержащего интегрирующее звено и звено с малой постоянной времени позволяет построить систему астатическую по заданию и возмущению.