-
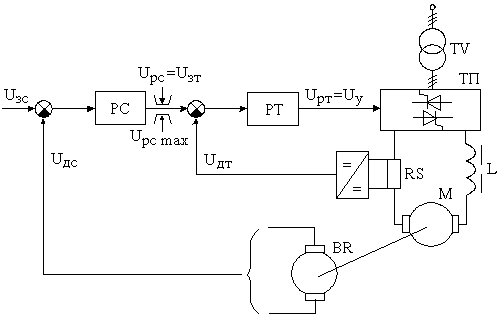
Принципиальная (блочная) схема двухконтурной аэп с подчиненным регулированием параметров
Рисунок
5.29

Принципиальная блочная схема однозонного АЭП представлена на рисунке 5.29.
-
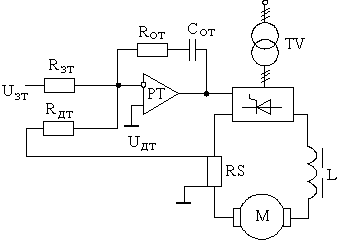
Расчет параметров и решающей цепи контура тока
Решающая цепь регулятора тока представлена на рисунке 5.30.
Передаточная функция регулятора тока
![]() ,
,
где
![]() ;
;
Тиз = Тэ; Тэ = RотСот;
![]() .
.
Рисунок 5.30
Последовательность расчета решающих цепей регулятора тока:
1) рассчитываем Тэ, kрт, kдт, kудтя;
2) пусть Сот = (0,014) мкФ;
3)
найдем
![]() ;
;
4)
определим
![]() ;
;
5) вычислим Rзт.
Чтобы в установившемся режиме сигнал РТ не изменялся, нужно, чтобы входной ток не поступал в канал ОС.
 ;
;
а) Uзт (mах) = Uдт (mах) Rзт = Rдт;
6) задаемся R1;
7) получим R2 = R1kудтя.
Численный пример расчета регулятора тока.
Дано: Рн = 10кВт;
Uн = 220В;
Iн = 50А;
nн = 1500об/мин;
Тэ = 0,04с;
Т = 0,005с;
Тм = 0,02с.
![]() ;
;
![]() ;
;
Еdo = 2,34Е2 (ф);
Еdo = 1,35Е2 (л).
Рн
= UнIн
– Рн
= 2RаIн2
![]() Ом;
Ом;
Rэ 2Rа = 0,4 Ом.
![]() .
.
Iд (м) = 2Iн = 100 А.
1)
![]() всегда;
всегда;
2) Сот = 0,1 мкФ;
3)
![]() К
много
Сот
= 1мкФ; Rот
= 40К;
К
много
Сот
= 1мкФ; Rот
= 40К;
4)
![]() К;
5К
R
500К;
К;
5К
R
500К;
5) Uзт (mах) = Uдт (mах) = 10В Rзт = Rдт = 200К;
Uзт
(mах)
= 5В; Uдт
(мах)
= 10В
![]() К;
К;
![]() ;
;
![]() ;
;
![]() ;
;
6) R1 = 5K;
7) R2 = R1kудтя = 566,6 = 330К.
УР:
а) Uзт
(max)
= Uдт
(max);
Rзт
= Rдт;
![]() ;
;
б)
Uзт
(max)
Uдт
(max);
Rзт
Rдт;
![]() .
.
Передаточная функция замкнутого контура тока по заданию
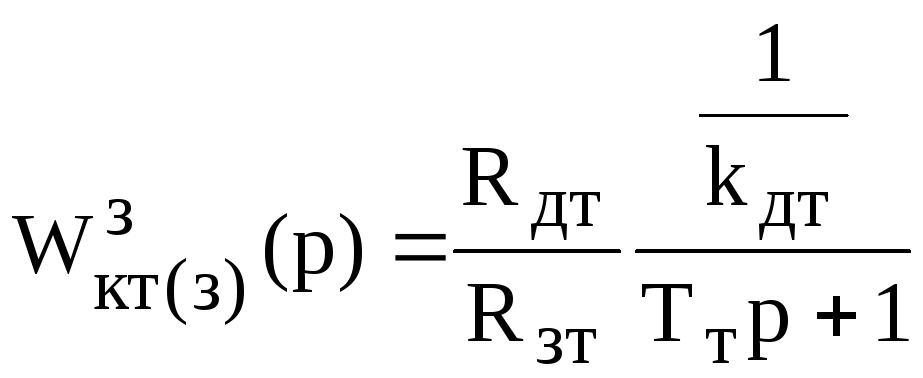 .
.
-
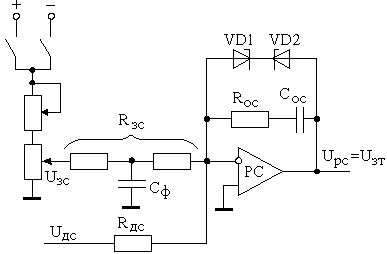
Расчет параметров и решающей цепи контура скорости
а) б)
Рисунок 5.31
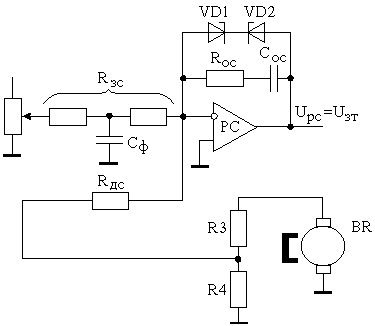
Передаточная функция регулятора тока
![]() ;
;
![]() ,
,
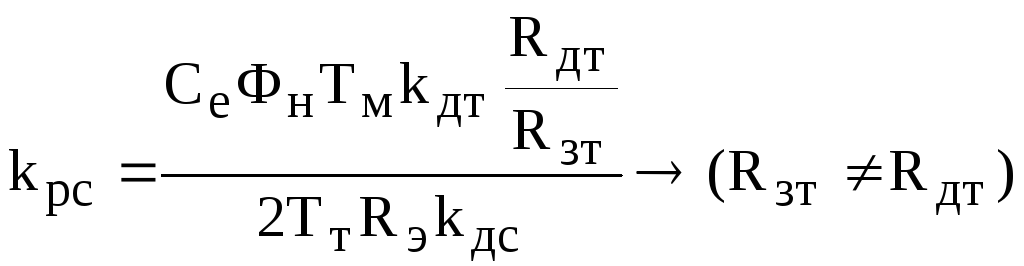
где kдт = kдт при Rзт = Rдт;
![]() при
Rзт
Rдт.
при
Rзт
Rдт.
Тиз = 4Тт.
Таким образом, коэффициент регулятора скорости
![]() ;
;
 ;
;
Последовательность расчета решающих цепей регулятора скорости:
1) находим kрт, Тиз;
2) задаемся Сос;
3) находим Rос;
4) определяем Rдс;
5) вычисляем Rзт;
6) получим Сф;
7) рассчитываем R3, R4;
8) выбираем VD1, VD2.
Численный пример расчета регулятора скорости.
Тиз = 4Тт = 40,01 = 0,04; Тт = 0,01.
![]() ,
,
где
![]() ;
;
nн тг = 1500 об/мин;
Uн тг = 220 В.
![]() ;
;
![]() .
.
![]() ;
;
Rа = 0,2 Ом;
![]() .
.
1)
![]() ;
;
2) Сос = 0,1 мкФ;
3)
![]() ;
;
4)
![]() ;
;
5)
![]() ;
;
при Uзс (mах) = Uдс (mах) Rзс = Rдс = 70К;
при
Uзс
(mах)
Uдс
(mах)
![]() .
.
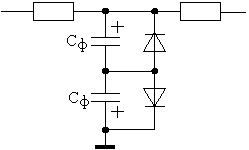
Рисунок
5.32
![]() ;
;
![]() ;
;
![]() (см.
рисунок 5.32).
(см.
рисунок 5.32).
7) R4 << Rдс; принимаем R4 = 1К.
kдс = kтг kдел;
![]() ;
;
![]() ;
;
![]() ;
;
8) UVD1,VD2 = ?
Uзт (mах) = Uрс (мах) = UVD1,2 + UVD1,2;
UVD1,2 = Uзт (м) – UVD1,2 = 10 – 1 = 9В.
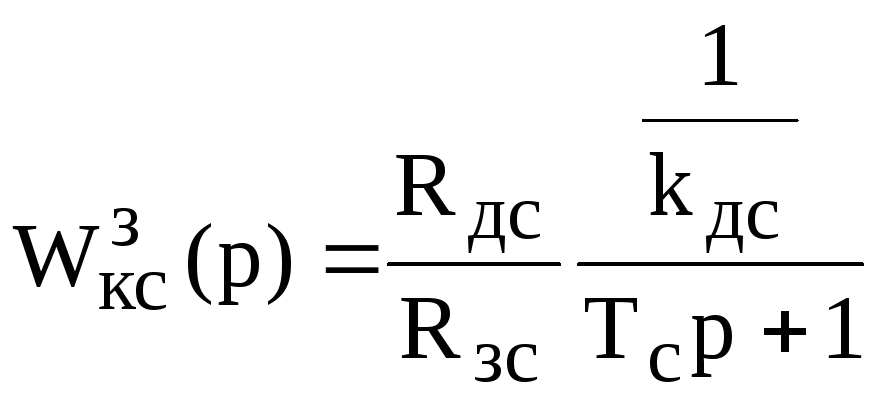
Передаточная функция контура скорости, настроенного на симметричный оптимум с фильтром на входе
![]() ,
,
где
![]() .
.
![]() .
.
УР:
![]() .
.
-
Построение скоростных характеристик
![]() ;
;
![]() .
.
![]() .
.
![]() ;
;
kдс = kтг = 1,4;
Сос = 0,4 мкФ;
![]() ;
;
![]() ;
;
![]() ;
;
Uдс (max) = kдс 0 = 1,4165 = 231.
В соответствии с рисунком 5.33, передаточная функция замкнутого контура скорости
 ;
;
УР:
![]() .
.
-
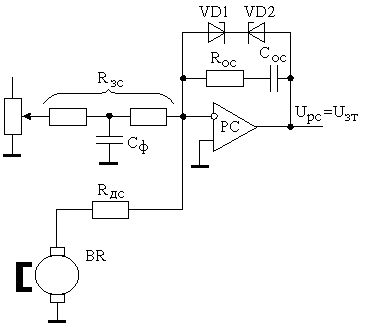
Рисунок 5.33
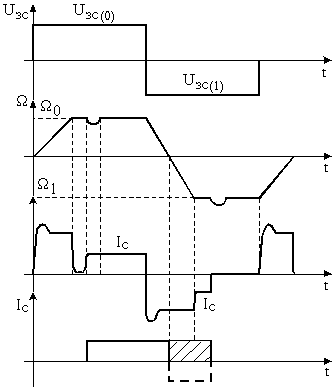
Осциллограммы сигналов при пуске, реверсе, торможении представлены на рисунке 5.34.
Рисунок
5.34
Функциональная схема системы ЭП с подчиненным регулированием параметров представлена на рисунке 5.35.
Рисунок 5.35