

Техническое обслуживание систем связи самолетов.
Основными задачами технического обслуживания систем связи являются своевременная подготовка их к полетам и обеспечение безотказной работы на протяжении установленных ресурсов и сроков службы. Эти задачи выполняются с помощью проведения профилактических, восстановительных и ремонтных работ.
Профилактические работы выполняются в определенном объеме через установленное число часов налета самолета.
Так, через 600 часов на самолете ИЛ-62 снимают магнитофон АРФА-МБ, приемопередающие блоки радиостанции «Микрон», приемопередатчики станции «Ландыш», абонентские гарнитуры и микрофоны ДЭМШ-1А.
Через 1200 часов снимаются дополнительно остальные блоки радиостанций «Микрон» и «Ландыш», МС-61, МАРС-БМ.
Из специальных измерительных устройств для самолетных радиостанций следует отметить измерительный блок «И» для радиостанции «Ландыш», контрольно – поверочный прибор П12-МК для радиостанции «Микрон», прибор КИП КАРАТ для радиостанции «Карат».
Глава 3. Методы определения
навигационных элементов полета
В основу работы радиотехнических систем навигации самолетов положена функциональная связь навигационного элемента полета (направление, расстояние, скорость и др.) с одним из параметров электромагнитного поля. Такая связь может быть установлена непосредственно с любым из четырех параметров распространяющейся радиоволны:
-
амплитудой колебаний Е(х);
-
фазой колебаний (х);
-
частотой колебаний (х);
-
временем распространения t(х), где х – навигационная координата самолета.
Принимаемый на земле или на борту сигнал отличается от излучаемого тем, что по крайней мере один из его параметров содержит навигационное сообщение.
Если
излучаются сигналы типа
![]() ,
то принимаемые сигналы могут иметь
вид:
,
то принимаемые сигналы могут иметь
вид:
![]() ;
;
![]() ;
;![]()
![]() ;
;
![]() .
.
Иногда
вместо параметров несущего колебания
радиоволны навигационная координата,
подлежащая измерению, может быть связана
с одним из параметров модулирующего
колебания
![]() ,
его амплитудой, фазой или частотой.
,
его амплитудой, фазой или частотой.
Обнаружение и извлечение навигационной информации из полученной информации осуществляется путем обработки того принятого сигнала, который содержит навигационное сообщение.
В зависимости от измеряемого параметра радионавигацион-ные системы делятся на амплитудные, частотные, фазовые и временные (импульсные), а в зависимости от измеряемого навигационного параметра – на угломерные, дальномерные и разностно-дальномерные.
В радионавигации и радиолокации основную информацию о пространственно-временном состоянии самолета несет радиосиг-нал:
-
амплитуда сигнала несет информацию о размере и отражающих свойствах объекта;
-
время запаздывания отраженного сигнала относительно зондирующего несет информацию о дальности до объекта;
-
частота колебаний, благодаря эффекту Доплера, несет информацию о радиальной скорости объекта;
-
поляризационные параметры отраженной радиоволны несут информацию о форме и соотношениях размеров объекта;
-
направление прихода отраженной радиоволны несет информацию об угловых координатах объекта.
Радиосигналы могут быть получены тремя методами:
-
приемом отраженных (рассеянных) объектом радиоволн при его облучении зондирующим импульсом (пассивная система);
-
путем излучения радиосигналов специального типа, принима-емых бортовыми системами активного ответа, которые воздействуют на специальное бортовое передающее устройство (ретранслятор или ответчик) и приема от него ретранслированного или ответного радиосигнала (активная радиолокация с активным ответом);
-
путем приема собственного излучения объектов наблюдения.
Первый метод широко используется в радиолокации и радионавигации (доплеровские измерители скорости и угла сноса – ДИСС, радиовысотомеры).
Второй метод – взаимодействие двух специальных радиотехнических устройств, одно из которых (запросчик) формирует запросные сигналы и получает ответные сигналы, а другое (ответчик) формирует ответные сигналы. Ответчик передает информацию только в том случае, если запросный сигнал соответствует действующим на данный момент параметрам (кодам). Сигнал ответчика принимается и анализируется запросчиком. Этот способ получения информации широко используется в радионавигации, радиолокации и системах опознавания.
Третий метод широко используется в радионавигации (пеленгация, определение угловых координат радиомаяков, приводных радиостанций и пр.), частично – радиолокации и является основным при передаче телеметрической навигационной информации, когда последняя искусственно закладывается отправителем в излучаемый сигнал.
Рассмотрим радиотехнические методы измерения координат и параметров движения самолета.
Информация о положении объекта может производиться несколькими методами, которые приведены на рисунке 6.
В дальномерно-угломерном методе измеряются азимут А, дальность D и угол места ε. При этом для определения положения объекта в пространстве используется сферическая система координат, а для определения положения объекта на плоскости – полярная система координат. Этот метод характерен для радиолокации, когда все измерения проводятся из одной точки.
|
Характерис- тика метода |
Пеленгационный |
Дальномерный |
Разностно – дальномерный |
Угломерно – дальномерный |
|
Схема определения местополо-жения самолета (МС) |
|
|
МС Б2 А1 А2 Б1 |
|
|
Пересечение линий положения |
Двух прямых |
Двух окружностей |
Двух гипербол |
Прямой и окружности |
|
Область применения |
Радионавигация и радиоразведка |
Радионавигация |
Радионавигация |
Радионавигация и радиолокация |
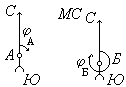
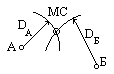
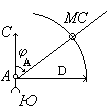
Рис. 6 Методы измерения координат самолетов
В радионавигации используются и другие методы:
-
дальномерный, когда место положения определяется пересечением двух окружностей;
-
угломерный (пеленгационный), когда пеленгаторы, расположенные в разных точках, определяют направление на объект (пересечение двух прямых);
-
разностно-дальномерный, когда измеряется разность расстояния до двух точек (линии положения – гиперболы);
Все методы определения места объекта в пространстве сводятся к измерению дальности и углов (направлений). Эти сведения закодированы в информационных параметрах сигналов – амплитуде, фазе, частоте и времени прихода.
Методы измерения этих параметров базируются на двух важнейших свойствах электромагнитных волн – постоянной скорости распространения, равной скорости света (300 000 км/c) и прямолинейности распространения в однородной среде (законы геометрической оптики), которые выдерживаются в реальных условиях с достаточно большой точностью.
Методы измерения расстояния
Для измерения расстояний в практике применяются три метода – импульсный (временной), частотный и фазовый.
Импульсный метод измерения расстояния
Импульсный метод измерения расстояния характеризуется тем, что информация о дальности D до объекта связана со временем запаздывания радиоволн от момента излучения зондирующего (запросного) импульса до момента прихода сигнала.
При
измерении дальности до пассивного
объекта радиоволна проходит расстояние
до объекта и обратно за время
![]() .
Дальность до объекта
.
Дальность до объекта
![]() .
.
Если
на объекте имеется ответчик (приемопередающее
устройство, отвечающее на запросный
сигнал), то необходимо учитывать время
задержки сигнала в ответчике, необходимое
для распознания запросного сигнала и
формирования ответного сигнала
![]() .
.
Общее время запаздывания сигнала в этом случае
![]()
Соответственно дальность до объекта в этом случае
![]()
В
случае, если объект излучает сигнал,
время до приема сигнала
![]() ,
и дальность
,
и дальность
![]() .
.
Как видим, измерение дальности во всех случаях связано с измерением времени от момента излучения до момента приема сигнала.
Импульсному
методу свойственны и определенные
недостатки. Так как прием отраженного
сигнала возможен только после излучения,
то невозможно измерять расстояние до
целей, находящихся ближе, чем
![]() для
пассивной радиолокации и
для
пассивной радиолокации и
![]() для
активной радиолокации. Т.е., за каждую
микросекунду длительности зондирующего
импульса (пачки импульсов) и задержки
в ответчике минимальная дальность будет
увеличиваться на 150 м.
для
активной радиолокации. Т.е., за каждую
микросекунду длительности зондирующего
импульса (пачки импульсов) и задержки
в ответчике минимальная дальность будет
увеличиваться на 150 м.
У
современных станций пассивной радиолокации
из-за переходных процессов в антенном
переключателе (переключение передача-прием)
![]() м.
м.
Для
однозначного отсчета дальности
необходимо, чтобы очередной зондирующий
импульс передатчика излучался не раньше,
чем поступит отраженный сигнал от самого
удаленного объекта, т.е. должно выполняться
условие
![]() ,
где
,
где
![]() время (период) между зондирующими
импульсами.
время (период) между зондирующими
импульсами.
С
учетом переходных процессов в приемнике,
передатчике и антенной системе реальное
минимально допустимое время между
зондирующими импульсами
![]() .
.
Соответственно,
максимальная
частота
повторения импульсов
![]() .
.
Выбор минимального значения частоты повторения зависит от минимального количества импульсов nмин, которое нужно принять от цели за время ее облучения, чтобы в результате однозначно выделить полезный сигнал на фоне шумовых и несинхронных помех.
При
частоте повторения импульсов
![]() для того, чтобы принять nмин
импульсов,
необходимо выполнить условие:
для того, чтобы принять nмин
импульсов,
необходимо выполнить условие:
![]() ,
откуда
,
откуда
![]()
 .
.
Если антенна станции имеет ширину луча QA и скорость вращения антенны NA об/мин (угловая скорость ωА ), то время облучения цели
 с.
с.
Следовательно,
![]() Гц.
Гц.
Таким образом, значение частоты повторения импульсов должно удовлетворять следующему условию:
![]() .
.
Частотный метод измерения расстояния
При
измерении дальности частотным методом
передатчик излучает непрерывные
колебания, частота которых меняется по
определенному закону (частотно-модулированные
колебания). Время запаздывания определяется
измерением разности частот (частоты
биений) излучаемых колебаний и отраженного
сигнала. Отраженный от цели сигнал на
входе приемника будет отличаться по
частоте от излучаемых передатчиком
колебаний на величину, пропорциональную
времени запаздывания
![]() .
Частота биений
.
Частота биений
![]() .
.
При
линейном законе изменения частоты
 ,
где
,
где
![]() -
девиация частоты колебаний,
-
девиация частоты колебаний,
![]() -
период модуляции.
-
период модуляции.
Частота
биений
![]()
Следовательно,
дальность до цели D
![]() где k
=
где k
=![]() =const.
=const.
Частота биений обычно измеряется подсчетом максимумов огибающей (числа периодов частоты биений) за период модуляции.
Число
этих максимумов
![]() .
.
Следовательно,
![]()
Учитывая,
что счетчик частоты биений может изменять
свои показания на целое число (минимум
на одну единицу), получим максимальную
ошибку по дальности
![]() как
разность между дальностью для числа
максимумов
как
разность между дальностью для числа
максимумов
![]() и дальностью для числа максимумов,
отличающегося на 1:
и дальностью для числа максимумов,
отличающегося на 1:
![]()
Это выражение определяет как минимальную дальность, которую можно измерить этим методом, так и разрешающую способность по дальности, так как при меньшем расстоянии показания дальности не изменятся. Для уменьшения этой минимальной дальности следует увеличивать девиацию частоты.
При одновременном измерении дальности до нескольких целей с помощью фильтров выделяются частоты биений, соответствующие расстоянию до каждой из них. Обычно для этого применяется многоканальный анализатор спектра.
Достоинства частотного метода состоят в возможности измерения малых расстояний и малой по сравнению с импульсным методом мощностью излучения, что облегчает работу аппаратуры на большой высоте и снижает ее габариты и вес.
Основные недостатки метода заключаются в сложности одновременного наблюдения многих целей, трудности разделения излучаемых и принимаемых сигналов, что вызывает необходи-мость применения на самолете двух антенн. Частотный метод измерения дальности применяется в самолетных высотомерах малых высот.
Фазовый метод измерения расстояния
Измерение дальности фазовым методом основано на пропорциональности фазового сдвига принимаемого сигнала и времени его запаздывания.
Если передатчик излучает синусоидальные немодулированные колебания с частотой изл и начальной фазой то значение текущей фазы изл = излt. Текущая фаза принимаемого сигнала, отраженного от неподвижного объекта (без учета изменения фазы сигнала при отражении) прм = изл(t-tD).
Разность текущих значений фаз излучаемых колебаний и принимаемых сигналов
излпрмизлtDfизлD/cD
где c/f изл - длина волны, соответствующая частоте изл.
Дальность до цели D = оказывается пропорцио-нальной разности фаз
В
связи с тем, что изменение фазы однозначно
лишь в пределах угла 2,
однозначное измерение дальности может
быть произведено лишь при D![]()
![]() что
совершенно недоста-точно для практического
применения. Кроме того, происходит
дополнительное изменение фазы при
отражении от цели, которое остается
неизвестным и вносит существенную
погрешность в измерение. При отражении
сигналов от подвижных целей возникает
доплеровский сдвиг частоты, также
приводящий к ошибкам отсчета изменения
фазы и, как следствие, дальности до цели.
что
совершенно недоста-точно для практического
применения. Кроме того, происходит
дополнительное изменение фазы при
отражении от цели, которое остается
неизвестным и вносит существенную
погрешность в измерение. При отражении
сигналов от подвижных целей возникает
доплеровский сдвиг частоты, также
приводящий к ошибкам отсчета изменения
фазы и, как следствие, дальности до цели.
Для
устранения указанных недостатков
применяют обычно двухчастотный фазовый
метод. При этом цель облучается двумя
частотами и
,
разность между которыми небольшая,
так что сдвиги их фаз при отражении
можно считать одинако-выми. Если начальные
фазы колебаний приравнять к нулю, то
фазы принимаемых отраженных сигналов
на входе приемников будут соответственно
отр1
= 1(t-tD)+
отр2
= 2(t-tD)+где
![]() дополнительный
сдвиг фазы при отражении.
дополнительный
сдвиг фазы при отражении.
На выходе первого смесителя выделяются колебания разностной частоты, текущее значение фаз у которых:
![]() .
.
На выходе второго смесителя выделяются колебания разностной частоты передатчиков с текущей фазой
![]() .
.
Разность фаз, измеряемая фазометром:
![]() или
или
 ,
где
,
где
![]() -
длина волны, соответствующая частоте
-
длина волны, соответствующая частоте
![]() .
.
Дальность
до цели
![]()
Для
удовлетворения условия однозначности
![]() ,
а следовательно, для обеспечения
измерения дальности в требуемых при
практическом пользовании пределах,
длина волны
,
а следовательно, для обеспечения
измерения дальности в требуемых при
практическом пользовании пределах,
длина волны
![]() ,
соответствующая разностному значению
рабочих частот излучения и
,
может быть выбрана достаточно большой.
,
соответствующая разностному значению
рабочих частот излучения и
,
может быть выбрана достаточно большой.
Так,
например, в случае необходимости
однозначного измерения дальности в
пределах максимальной
![]() значение разности рабочих частот
значение разности рабочих частот
![]() .
.
Для
дальности 400 км разность рабочих частот
должна составлять
![]() Гц.
Гц.
Погрешности измерения дальности из-за доплеровского сдвига частоты при использовании двухчастотного метода малы, так как дополнительные приращения фаз на частотах и при вычитании будут взаимно компенсироваться.
Фазовые методы обеспечивают очень большую точность измерения дальности, однако у них отсутствует селективность (разрешающая способность) по дальности в связи с невозможностью обеспечения разделения сигналов от разных целей. Поэтому этот метод широко используется при построении самолетных радиовысотомеров больших высот и систем определе-ния дальности до одиночного объекта.