

Глава 4. Угломерные радионавигационные
УСТРОЙСТВА
Угломерные радионавигационные устройства предназначены для измерения угловых координат самолета и подразделяются на бортовые и наземные, передающие (радиомаяки) и приемные (пеленгаторы).
Для определения угловых координат самолета используются следующие аппаратурные решения:
-
применение бортовых автоматических радиокомпасов совместно с приводными радиостанциями (ПРС) и широковещательными радиостанциями (ШВРС);
-
применение наземных радиопеленгаторов совместно с бортовыми системами средств связи;
-
бортовые приемные навигационные устройства и наземные радиомаяки.
Автоматические радиокомпасы
Автоматический радиокомпас (АРК) предназначен для самолетовождения по приводным и широковещательным маякам и радиостанциям, а также для выполнения предпосадочных маневров.
АРК обеспечивает непрерывный отсчет курсового угла радиостанции (КУР), т.е. угла в горизонтальной плоскости между продольной строительной осью самолета и направлением на радиостанцию.
АРК позволяет решать следующие навигационные задачи:
-
совершать полет на радиостанцию и от нее с визуальной индикацией КУР (нульвождение);
-
автоматически определять пеленг на радиостанцию по указателю текущего курса;
-
обеспечивать непрерывный отсчет КУР;
-
совершать предпосадочный маневр и посадку самолета по приборам по системе слепой посадки (ОСП);
-
принимать и прослушивать сигналы от приводных радиомаяков и широковещательных радиостанций, работаю-щих в диапазонах длинных и средних волн (диапазон частот 100 – 2000 кГц).
Точность определения курсового угла радиостанции составляет (2 3)0 и дальность действия 300 – 600 км.
Структурная схема автоматического радиокомпаса представлена на рис. 16.
В основу действия автоматического радиокомпаса положено использование направленного приема энергии электромагнитного поля, излучаемого приводным радиомаяком или широковеща-тельной радиостанцией. Для этого на входе приемника устанав-ливается специальная антенна, обладающая резко выраженным направлением нулевого приема.
Такой антенной является рамочная антенна. Амплитуда или мощность принимаемого такой антенной сигнала зависит от направления прихода радиоволн. Фазы сигнала для направлений приема, расположенных в левой и правой полуплоскостях, отличаются на 1800, что позволяет однозначно определять направление на пеленгуемую радиостанцию. В этой системе применяется описанный в предыдущих разделах метод пеленгования по минимуму сигнала. Этот метод, как было сказано ранее, обладает повышенной точностью благодаря максимальной крутизне диаграммы направленности антенны и, следовательно, высокой чувствительностью к отклонению оси антенны от направления на радиомаяк в области минимума сигнала. Точность в таких системах в основном зависит от уровня помех.
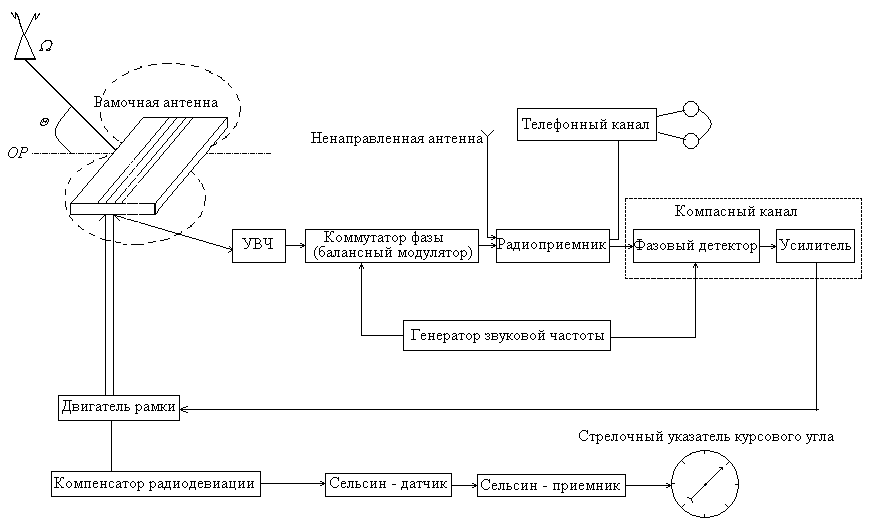 Рис. 16. Обобщенная
структурная схема автоматического
радиокомпаса
Рис. 16. Обобщенная
структурная схема автоматического
радиокомпаса
Все радиокомпасы, как отечественные, так и зарубежные, построены по классической схеме с балансной модуляцией и работают в одном из трех режимов:
-
в режиме автоматического пеленгования КОМПАС (основной режим);
-
в режиме приема сигналов на направленную антенну РАМКА;
-
в режиме приема сигналов на ненаправленную антенну АНТЕННА.
Так как рамочная антенна обладает двумя направлениями минимума слышимости, только ее применение для автоматической пеленгации невозможно, и на самолетах устанавливаются две антенны – рамочная и ненаправленная (штыревая или шлейфовая).
Суммарная диаграмма направленности этих двух антенн представляет кардиоиду, однозначно определяющую направление на пеленгуемую радиостанцию.
Работа АРК основывается на сложении сигналов пеленгуемой радиостанции, принятых на обе антенны, и коммутации сигналов с рамки с частотой опорного генератора, в результате чего напряжение на входе приемника оказывается промодулированным по амплитуде. Путем сравнения сигналов на выходах приемника и опорного генератора вырабатывается сигнал ошибки, поступающий в следящую систему. Этот сигнал заставляет следящую систему повернуть рамочную антенну таким образом, чтобы направление приема минимума сигнала рамочной антенны совпало с направлением на пеленгуемый радиомаяк. Угол поворота рамки с помощью дистанционной электромеханической системы передачи угла поворота (сельсина) передается на индикаторное устройство, указывающее курсовой угол радиостанции.
АРК является амплитудно-фазовым пеленгатором, в котором принятый рамочной антенной сигнал несет информацию о направлении на пеленгуемую радиостанцию, так как наличие сигнала на выходе рамочной антенны несет информацию об отклонении продольной оси самолета от направления на радио-маяк, амплитуда сигнала пропорциональна углу отклонения пеленга от оси самолета, а фаза сигнала указывает сторону отклонения.
Пеленгация в реальном радиокомпасе производится по равносигнальному методу. Специальное устройство – коммутатор фазы (балансный модулятор) периодически с частотой несколько десятков герц изменяет фазу эдс, наводимой в рамочной антенне, на 1800. Это приводит к изменению с такой же частотой направления кардиоиды с правого на левое.
Компасное устройство измеряет разность амплитуд сигналов, полученных правой и левой кардиоидой, усиливает разностный сигнал и подает его на двигатель поворота рамочной антенны. При этом ее поворот будет происходить по часовой стрелке в том случае, если сигнал с правой кардиоиды будет иметь бóльшую амплитуду, чем сигнал с левой кардиоиды. При равенстве сигналов поворота рамки происходить не будет, следовательно, в этот момент минимум диаграммы направленности рамки направлен на пеленгуемую радиостанцию. Таким образом мы получаем направление устойчивого пеленга – любое отклонение от этого направления будет сводиться к нулю.
Но одинаковые амплитуды сигналов будут приходить и в том случае, если минимум направлен на радиостанцию с ошибкой в 1800. В этом случае мы имеем явление неустойчивого пеленга – любое небольшое отклонение рамки от этого положения либо вследствие влияния шумов, либо эволюции самолета отно-сительно пеленгуемой радиостанции вызовет на двигателе увеличивающееся напряжение ошибки, которое сведется к нулю в точке устойчивого пеленга.
При этом плоскость рамочной антенны всегда перпендику-лярна направлению на пеленгуемую радиостанцию. За начало отсчета принимается такое положение рамочной антенны, при котором ее плоскость перпендикулярна продольной оси самолета.
Измерив угол между началом отсчета и направлением на пеленгуемую радиостанцию, мы получим курсовой угол радиостанции (КУР).
При эксплуатации АРК на самолетах отмечено, что ошибка измерения КУР не только больше расчетной, но и различается в зависимости от направления на пеленгуемую радиостанцию. Причина такого явления – возбуждение и отражение принимае-мого сигнала элементами конструкции самолета (вторичное излучение).
В результате вторичного излучения результирующая диаграмма направленности приемных антенн искажается. Это явление называется радиодевиацией.
В этом случае рамочная антенна разворачивается не на угол пеленга, а на угол отсчета радиокомпаса (ОРК). При наличии радиодевиации КУР равен алгебраической сумме ОРК и поправки на радиодевиацию Р.
Радиодевиация может достигать значительной величины, но является практически постоянной для пары – данного самолета и радиокомпаса.
Для компенсации ошибок пеленгации, вызванных влиянием фюзеляжа, крыльев, внешних подвесок и других выступающих частей самолета на диаграмму направленности антенной системы АРК, применяют специальные компенсаторы, электрические и механические.
Компенсатор радиодевиации вносит поправку в показания стрелочного указателя на основании графика радиодевиации, снимаемого для каждого самолета индивидуально, при этом АРК обеспечивает практическую точность (23)0. В общем случае погрешности могут быть инструментальными и методическими. К методическим погрешностям следует отнести неустойчивую работу АРК в «воронке радиостанции» и влияние отклонения плоскости поляризации радиоволн от вертикального положения, связанное с особенностями их распространения. К инструмен-тальным можно отнести креновые и динамические погрешности. Креновая ошибка возникает при отклонении плоскости вращения рамки от горизонтальной, а динамическая ошибка связана с характеристиками следящей системы и влиянием помех. Для уменьшения влияния динамических погрешностей в радиокомпа-сах применяется дополнительная рамочная антенна, диаграмма направленности которой перпендикулярна диаграмме основной рамочной антенны.
В режиме РАМКА все каскады, обеспечивающие автоматическое пеленгование, отключаются. АРК работает как приемник с направленной антенной, управление которой осуществляет член экипажа путем нажима тумблера ручного вращения влево или вправо. Пеленгование проводится по отсутствию прослушивания сигнала при определенном положении рамочной антенны. Режим РАМКА применяется в основном в условиях высокого уровня электростатических помех (грозовые явления).
В режиме АНТЕННА АРК используется как приемник с всенаправленной антенной для приема, прослушивания и опознавания позывных сигналов радиомаяков. В этом режиме рамочный вход и управляющая схема отключаются.
В настоящее время в отечественной авиации используются радиокомпасы АРК-9, АРК-10, АРК-11, АРК-15, АРК-22 и другие. Все они работают в международном диапазоне 100 – 2000 кГц.
На зарубежных самолетах наиболее распространен АРК фирмы Маркони АД-360 (Англия), который работает в диапазоне 100÷1790 кГц. Его точность определения курсового угла радиостанции составляет 2,50.
Автоматический радиокомпас АРК-15
Особенностью АРК-15 является неповоротная рамочная антенна, работающая при температуре окружающей среды до +1400С.
Использование системы неповоротных рамок и гониометра позволило исключить сложный механизм вращения направленной антенны, заметно снизить вес, облегчить эксплуатацию и повысить надежность работы радиокомпаса.
Гониометрическая система состоит из двух взаимно перпендикулярно направленных антенн с «восьмерочной» диаграммой направленности и индуктивного гониометра – бесконтактного индукционного гониометрического преобразователя сигналов ПСГ-2 на ферритовом сердечнике. Он состоит из двух взаимно перпендикулярных полевых катушек, соединенных с антеннами, и одной подвижной катушки. Полевые катушки закрепляются неподвижно и называются статорными, а подвижная катушка может вращаться в поле и называется роторной или искательной.
В АРК-15 используется высокостабильная сетка гетеродинных частот с дискретностью 500 Гц и точностью установки частоты 100 Гц, реализованная на цифровых микросхемах и опорном кварцевом генераторе 25,6 кГц. Контуры тракта высокой частоты приемника перестраиваются с помощью варикапов, что позволило исключить агрегат переменных конденсаторов с дистанционной тросовой системой механического управления.
В АРК-15 частота коммутации сигналов рамки в балансном модуляторе (135 Гц) совпадает с частотой работы мотора вращения искателя гониометра, что позволило убрать преобразователь частоты и упростить схему.
Основные тактико-технические данные АРК-15:
Дальность действия …………………………………..…… 350 км
Точность индикации курсового угла ….………….…….... 2
Диапазон рабочих частот ………………..………..150÷1799,5 кГц
Точность установки частоты ………………………….…. 100 Гц
Время перестройки с одной частоты на другую………..…..4 с
Чувствительность приемника в режиме ТЛФ при
отношении сигнал/шум 6 дб, на участке диапазона:
150 – 239,5 кГц.…………….……..………………. 8 мкВ
240 – 1799,5 кГц..……..…………….…………….. 5 мкВ
Полоса пропускания приемника на уровне 0,7 ………….. 2,7 кГц
Предельная чувствительность по приводу при отклонении
от пеленга 10 и колебаниях стрелки 3………………..25 мкВ/м
Угловая скорость (средняя скорость индикации)….…….30 град/c
Диапазон рабочих температур:
Для рамочной антенны ……………….(- 60) (+ 140)С
Для радиокомпаса …………………………………. 60С
Ток потребления радиокомпаса
~ 36 В 400 Гц …………………………………………… 1 А
+ 27 В ………………………………………………...……2 А
Масса
комплекта радиокомпаса …………………………….…...15
кг![]()
Радиокомпас АРК-15 получает управляющие сигналы от пульта управления, который предназначен для дистанционного управления работой АРК-15 и настройки на заданную частоту с помощью ручек наборного устройства. На передней панели пульта расположены следующие органы управления:
-
Переключатель режимов работ с положениями: ВЫКЛ, КОМПАС, АНТЕННА, РАМКА; этим переключателем выбирается один из режимов работы компаса.
КОМПАС - основной режим, обеспечивающий автоматическое однозначное пеленгование радиостанций.
АНТЕННА - режим, обеспечивающий прослушивание сигналов радиостанций; в этом режиме радиокомпас используется в качестве обычного средневолнового радиоприемника.
«РАМКА» - вспомогательный режим, обеспечивающий прослушивание сигналов в условиях электростатических помех, при нажатии одноименной кнопки на пульте управления радиокомпасом.
-
Тумблер–переключатель ТЛФ/ТЛГ при установке в соответствующее положение позволяет прослушивать сигналы радиостанций, работающих в телефонном или телеграфном режимах.
-
Тумблер–переключатель полосы пропускания ШИР-УЗК позволяет выбирать необходимую полосу пропускания радиокомпаса.
-
Кнопка УПРАВЛЕНИЕ в двухпультовом варианте переключает управление на данный пульт.
-
Кнопка РАМКА для включения автономного вращения искательной катушки гониометра.
-
Потенциометр ГРОМКОСТЬ для установки уровня звука на телефонном выходе.
-
Две декады настройки с тремя вращающимися шкалами установки сотен, десятков и единиц килогерц.
-
Тумблер – переключатель I и II канала, включающий первую или вторую декаду настройки.
Настройка радиокомпаса на заданную частоту осуществляется с помощью установленных на передней панели пульта двух одинаковых наборных устройств. Значение частоты может набираться заранее на обоих устройствах, а работа АРК производится от одного из них и определяется положением тумблера КАНАЛЫ. Если тумблер КАНАЛЫ находится в положении I, это означает, что АРК настроен на частоту, значение которой установлено на первом наборном устройстве, при этом индикацией включения первого наборного устройства будет загорание соответствующей лампы на пульте управления. При включении тумблера КАНАЛЫ в положение II, настройка АРК определяется вторым наборным устройством, а индикация включения – загоранием другой лампы.
Во время захода на посадку АРК автоматически переключается с одной частоты на другую с помощью автомата – переключателя УАП-1М. Как правило, частота дальней приводной радиостанции (ДПРС) устанавливается на канал I, а частота ближней приводной радиостанции (БПРС) – на канал II. При заходе на посадку самолет идет на ДПРС с КУР = 0, т.е. по линии, совпадающей с осью взлетно-посадочной полосы (ВПП). После пролета над маркерным маяком ДПРС происходит автоматическое переключение на частоту БПРС. При невыполнении посадки самолет уходит на «второй круг», осуществляя маневр повторного захода. В момент перехода значения КУР БПРС через значение 60° (300°), что соответствует выполнению «первого» разворота, происходит автоматическое переключение АРК снова на частоту ДПРС.