

Методы измерения скорости
В основе измерения скорости цели лежит эффект Доплера.
Доплеровское смещение частоты определяется выражением
![]() .
.
На
вход приемника поступают с передатчика
через аттенюатор непрерывные колебания
![]() и колебания отражен-ного сигнала
и колебания отражен-ного сигнала
![]() ,
,
где Uпрд – амплитуда напряжения передатчика;
Uc – амплитуда напряжения отраженного
сигнала;
![]() –
сдвиг фаз между излучаемым и прини-
–
сдвиг фаз между излучаемым и прини-
маемым сигналами.
Амплитуда результирующего напряжения на входе приемника
![]() .
.
В
связи с тем, что
![]() >>
Uc,
обычно считают
>>
Uc,
обычно считают
![]() ,
где m
=
,
где m
=![]() .
.
При неподвижной цели дальность до нее остается постоянной, сдвиг фаз не меняется и значение результирующего напряжения на входе приемника будет оставаться постоянным.
При движении объекта величина сдвига фаз будет меняться, что вызовет изменение амплитуды результирующего напряжения на входе приемника с круговой частотой Доплера:
![]()
В
выходном устройстве по значению
доплеровской частоты определяется
радиальная скорость объекта
![]() .
.
Работа
измерителя скорости может обеспечиваться
как непрерывным излучением, так и
импульсной работой. В этом случае на
выходе приемника получим видеоимпульсы,
амплитуда которых будет также изменяться
по гармоническому закону. Может оказаться,
что при определенных значениях скорости
объекта
![]() ее дальность за период посылки импульсов
будет изменяться на такую величину D,
которая вызовет изменение фазы отраженного
сигнала на величину 2n.
При этом амплитуда результирующего
напряжения на входе приемника не
изменяется, следовательно, выделить
частоту Доплера, т.е. измерить скорость
объекта, невозможно.
ее дальность за период посылки импульсов
будет изменяться на такую величину D,
которая вызовет изменение фазы отраженного
сигнала на величину 2n.
При этом амплитуда результирующего
напряжения на входе приемника не
изменяется, следовательно, выделить
частоту Доплера, т.е. измерить скорость
объекта, невозможно.
Скорость,
при которой появляется подобный эффект,
называется «слепой» скоростью![]() сл.
сл.
Радиоустройства, использующие эффект Доплера, применяют-ся для построения систем селекции движущихся целей, т.е. выделения движущихся с переменной относительно наблюдателя скоростью целей, не выводя на индикацию как неподвижные цели, так и те, скорость которых относительно объекта не изменяется.
Доплеровский метод очень широко применяется также при построении измерителей скорости и угла сноса самолета (ДИСС).
Методы определения местоположения объектов
Местоположение объектов в пространстве определяется обычно в прямоугольной, полярной или цилиндрической системах координат. Для определения местоположения объекта на плоскости достаточно иметь две координаты, а для определения его местоположения в пространстве – три координаты.
Геометрическое место точек, для которых геометрическая величина, характеризующая положение цели, постоянна, называется линией положения
Радиотехнические средства позволяют определять следующие геометрические величины, характеризующие местоположение объекта:
-
пеленг
 искомой точки М
из фиксированной точки А
или же обратный пеленг
искомой точки М
из фиксированной точки А
или же обратный пеленг
 ;
при этом пеленг, отсчитываемый
относительно северного направления
географического мери-диана называется
истинным, а отсчитываемый относительно
продольной оси самолета или корабля –
бортовым, линия положения – прямая,
проходящая через точки А
и М;
(рис.10);
;
при этом пеленг, отсчитываемый
относительно северного направления
географического мери-диана называется
истинным, а отсчитываемый относительно
продольной оси самолета или корабля –
бортовым, линия положения – прямая,
проходящая через точки А
и М;
(рис.10);
 N
N
N продольная ось
![]() и
и
![]() и
M
и
M
![]() б
б
A
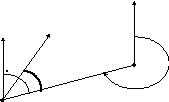
Рис. 10. Пеленг и линия положения точки А относительно М
-
разность пеленгов
 двух фиксированных точек А
и Б
из искомой точки М
и
линия положения
- часть
окружности, на которой лежат точки А,
Б
и М,
и по которой перемещается точка М
так, чтобы
двух фиксированных точек А
и Б
из искомой точки М
и
линия положения
- часть
окружности, на которой лежат точки А,
Б
и М,
и по которой перемещается точка М
так, чтобы
 была постоянной (рис.11);
была постоянной (рис.11);
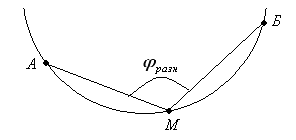
Рис. 11. Пеленг и линия положения точки М относительно А и Б
-
расстояние D между искомой и фиксированной точкой, линия положения которого - окружность с центром в точке А и радиусом D, проходящая через точку М (рис.12);
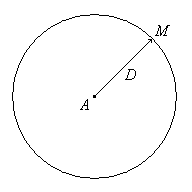
Рис. 12. Расстояние и линия положения точки М относительно А
-
разность расстояний между искомой и двумя фиксированными точками, линия положения – гипербола, в фокусах которой расположены точки А и Б (рис. 13);
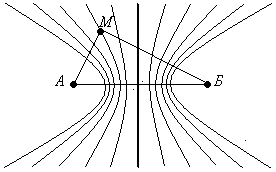
Рис. 13. Разность расстояний и линии положения точки М относительно А и Б
-
сумму расстояний от искомой до двух фиксированных точек, для которой линия положения – эллипс, проходящий через точку М, с фокусами в точках А и Б (рис.14).
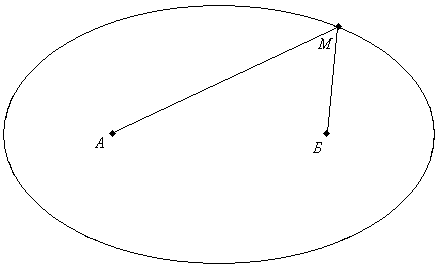
Рис. 14. Сумма расстояний и линия положения точки М относительно А и Б
Местоположение цели на плоскости определяется нахожде-нием пересечения каких-либо двух линий положения (рис.15). На практике используют обычно пересечение следующих линий положения:
-
двух прямых (пеленгационный метод), этот метод получил широкое распространение в радионавигации;
-
двух окружностей (дальномерный метод);
-
двух гипербол (разностно-дальномерный, или гиперболичес-кий метод);
-
прямой и окружности (угломерно-дальномерный метод).
|
|
|
МС Б2 А1 А2 Б1 |
|
|
Двух прямых |
Двух окружностей |
Двух гипербол |
Прямой и окружности |
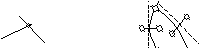

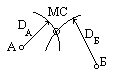
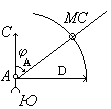
Рис. 15. Местоположение цели на плоскости
При определении пространственного местоположения линии положения необходимо заменить поверхностями положения. Например, линия постоянной дальности (окружность) заменяется сферой с тем же радиусом. Линия постоянного пеленга превратится в вертикальную плоскость, проходящую через фиксированную и искомую точку.
Для определения местоположения в этом случае необходимо найти точку пересечения поверхностей положения.
Положение цели в пространстве относительно заданной фиксированной точки О в полярной системе координат характе-ризуется дальностью D и углами и , отсчитываемыми в двух взаимно перпендикулярных плоскостях, проходящих через фикси-рованную точку.
При определении местоположения летательного аппарата относительно фиксированной точки на земле углы и соответствуют азимуту и углу места цели. Иногда угол места заменяется высотой (цилиндрическая система координат).
В большинстве случаев в радионавигации ограничиваются определением дальности и азимута, т.е. двух координат.
Итак, первая задача настоящего курса – ознакомиться с радиотехническими методами измерения координат и параметров движения – решена.
Следующая задача – ознакомиться с основными способами технической реализации радиотехнических методов, с основными принципами работы, тактико-техническим данными и составом аппаратуры некоторых конкретных систем и устройств навигационно-пилотажного комплекса.