

Глава 10. Радиолокационные визиры
С появлением реактивной авиации существенно усложнилось навигационное обеспечение полета, выполняемого обычно на больших высотах (8 – 12 км) вне видимости ориентиров на земной поверхности. В этих условиях экипаж лишен возможности визуально контролировать столь важные навигационные параметры, как путевая скорость и угол сноса. Следует учесть, что штурман ведет прокладку маршрута именно по этим двум параметрам – по путевой скорости прокладывается пройденный путь, а по величине угла сноса определяется боковое отклонение от заданной ему линии движения.
Несмотря на получение этой информации от доплеровских измерителей скорости и угла сноса, потребовалась принципиально новая аппаратура для наблюдения за ориентирами на земной поверхности при условии отсутствия оптической видимости.
Такой аппаратурой стали радиолокационные визиры (РЛВ), работающие в сантиметровом диапазоне волн. Радиолокационные визиры позволяют просматривать земную поверхность под самолетом в любых условиях полета и, кроме того, заранее обнаруживать очаги грозовой деятельности и встречные препятствия (горные вершины, летящие самолеты) на маршруте полета.
Действие РЛВ основано на известном принципе отражения дискретно посылаемых импульсов высокочастотной энергии от земной поверхности или грозового очага, концентрация капель влаги в котором значительно выше, чем в обычных облаках.
Потенциал отраженного сигнала зависит от способности отразившей его среды поглощать и отражать электромагнитные колебания.
Эта способность может быть представлена в виде ряда отражающих поверхностей, расположенных по мере увеличения поглощения электромагнитной энергии и убывания отражающих свойств: металлические объекты (мосты, крыши, линии передач электроэнергии, железные дороги и пр.); постройки; леса; земляной грунт; водоемы.
При обзоре облачности уровень отраженного сигнала будет зависеть от степени ионизации атмосферы в районе грозовой деятельности, размеров и концентрации капель влаги в облаках и других факторов. Поскольку в очагах грозовой деятельности каплеобразование и ионизация максимальны, их можно хорошо наблюдать на экране.
Принятые РЛВ отраженные сигналы после преобразования подаются на электронно-лучевой индикатор. Изображение на нем напоминает контурную географическую карту, на которой достаточно четко просматриваются реки, береговая линия, населенные пункты и другие ориентиры.
РЛВ позволяют экипажу производить по выявленным характерным ориентирам радиолокационную коррекцию бортовых вычислительных машин.
После длительного полета над безориентирной местностью, когда на экране РЛВ появляется характерный ориентир, штурман накладывает на него калибровочные метки азимута и наклонной дальности. Когда эти метки на индикаторе совпадут с изображением ориентира, на пульте управления необходимо нажать кнопку КОРРЕКЦИЯ. В этот момент сигналы азимута и дальности направляются в БЦВМ. В результате полета над безориентирной местностью, за счет накопления ошибок от изменения характера отражающей поверхности при измерении путевой скорости и угла сноса аппаратурой ДИСС, точка текущего местоположения самолета может несколько сместиться от реального местоположения самолета. Коррекция по РЛВ исправляет («обнуляет») ошибку и приводит координаты самолета к истинному положению
Рассмотрим типичный радиолокационный визир, устанавливаемый на всех современных самолетах – метеонавигационный радиолокатор ГРОЗА.
Радиолокатор ГРОЗА
Метеонавигационный радиолокатор ГРОЗА позволяет экипажу самолета решать следующие задачи:
-
производить обзор расположенной впереди самолета части земной поверхности с целью выполнения ориентировки по характерным наземным объектам. При этом радиолокационное изображение на индикаторе близко к изображению данного участка на карте местности соответствующего масштаба;
-
обнаруживать зоны активной грозовой деятельности и турбулентной облачности и определять их местоположение относительно самолета. При этом радиолокационное изобра-жение на индикаторе соответствует виду сверху на горизон-тальный слой воздушного пространства впереди самолета на высоте полета;
-
оценивать относительную опасность обнаруженной зоны или облака для полета;
-
измерять угол сноса самолета при полете над любыми участками суши, включая участки, лишенные характерных ориентиров;
-
производить при наличии в радиолокаторе специального блока коррекцию определенных бортовым навигационным вычислителем текущих координат самолета, используя для этого характерные наземные ориентиры.
Радиолокатор ГРОЗА имеет пять разверток дальности с различными длительностями:
-
развертка «30» протяженностью от 0 до 30 км с метками дальности через 10 км;
-
развертка «50» протяженностью от 0 до 50 км с метками дальности через 10 км;
-
развертка «125» протяженностью от 0 до 125 км с метками дальности через 25 км;
-
развертка «250» протяженностью от 0 до 250 км с метками дальности через 50 км;
-
развертка «375» протяженностью от 200 до 350 – 400 км с метками дальности через 50 км. Величина дальности, при которой заканчивается развертка на индикаторе, определяется частотой самолетной электросети 115 В и составляет:
-
350 км при частоте 420 Гц;
-
375 км при частоте 400 Гц;
-
400 км при частоте 380 Гц и ниже.
Погрешность интервалов между любыми соседними масштабными метками дальности при любой из разверток составляют 2 % от интервала дальности.
Азимутальный сектор обзора радиолокатора ГРОЗА составляет не менее 100° в обе стороны от строительной оси самолета. Разбивка азимутальной шкалы на индикаторе осуществляется через 10°, а оцифровка – через 200. Азимутальный сектор 20° относительно нулевого деления дополнительно градуирован через 2° для измерения угла сноса самолета.
Максимальная дальность наблюдения различных объектов радиолокатором ГРОЗА на самолете Ил-62 составляет:
-
Особо крупные города и промышленные объекты………300 км
-
Областные города и средние промышленные центры…..200 км
-
Незастроенные участки земной поверхности,
водоемы и реки…………………………………………………150 км
-
Зоны грозовой деятельности средней интенсивности…..200 км
-
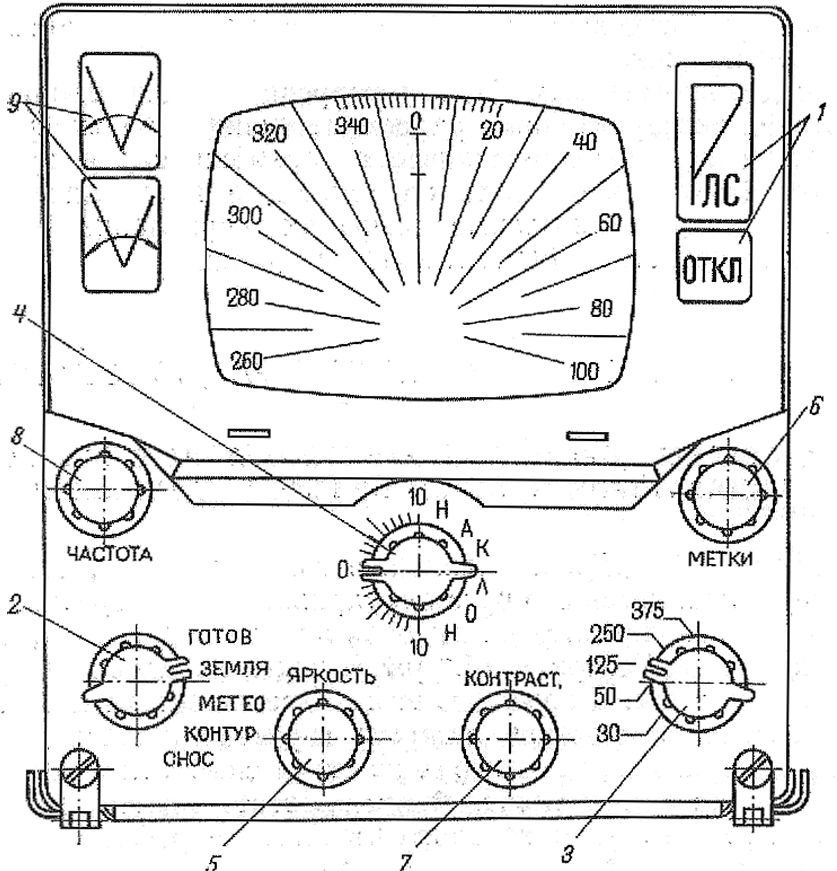
Рис. 35. Лицевая панель главного индикатора.
Назначение органов управления на лицевой панели главного индикатора приведены на рис.35. Органы управления выполняют следующие функции:
1 – клавиши включения РЛС и отключения ОТКЛ радиолокатора;
2 – переключатель режимов работы радиолокатора;
Когда переключатель установлен в положение ГОТОВ, излучения радиоволн не происходит, но радиолокатор находится в постоянной готовности к немедленной работе, если перед этим он был не менее 5 минут подключен к самолетной сети кнопкой РЛС.
Когда переключатель установлен в положение ЗЕМЛЯ, начинается излучение радиоволн и производится обзор земной поверхности, расположенной в зоне азимутального обзора радиолокатора. При этом положении включается в действие регулятор 7 КОНТРАСТ, который позволяет повышать контрастность изображений интересующих оператора наземных объектов на фоне отражений от незастроенных участков суши.
Когда переключатель установлен в положении МЕТЕО, то радиолокатор излучает радиоволны в виде узкого луча и осуществляет просмотр лишь ограниченного по высоте слоя воздушного пространства, не захватывая земной поверхности. Этим обеспечивается наблюдение только изображений мощно-кучевой облачности и грозовых зон без помех от земной поверхности при любых высотах полета более 1000 м.
Когда переключатель установлен в положение КОНТУР, радиолокатор, как и в предыдущем режиме, производит обнаружение метеорологических образований, но в этом режиме полностью подавляются на индикаторе участки обнаруженных грозовых зон и мощной облачности, отражения от которых превышают определенную величину. Это позволяет косвенно судить об ожидаемой турбулентности в грозовой зоне или облаке.
Когда переключатель установлен в положение СНОС, радиолокатор вновь начинает производить обзор земной поверхности, но автоматическое движение его антенны по азимуту выключается. Совмещение проекции луча на земной поверхности с истинной линией пути самолета, указывающее угол сноса самолета, производится путем ручного азимутального перемещения антенны посредством клавиш 9. Скорость перемещения при этом может регулироваться регулятором 7 КОНТРАСТ.
3 – переключатель длительности разверток;
4 – регулятор наклона луча антенны НАКЛОН;
Он позволяет наклонить луч антенны относительно плоскости горизонта на любой угол в пределах 10 градусов.
5 – регулятор яркости радиолокационного изображения ЯРКОСТЬ;
6 – регулятор яркости масштабных меток дальности МЕТКИ;
7 – регулятор контрастности изображений КОНТРАСТ;
При максимальном значении контрастности на индикаторе на равномерном по яркости фоне земли видны в виде резко отличных по яркости засветок только особо крупные населенные пункты, а в виде четко очерченных темных пятен – водные ориентиры; при работе в режиме СНОС этим регуля-тором осуществляется изменение скорости азимутального движения антенны, так как изменение контрастности в этом режиме неприемлемо;
8 – регулятор частоты гетеродина ЧАСТОТА, который обеспечи-вает изменение частоты гетеродина радиолокатора и исполь-зуется для ввода частоты в зону захвата системы автоматического регулирования после включения станции; при дальнейшей работе экипажем не используется;
9 – клавиши ручного управления движением антенны по азимуту.
Типичные радиолокационные изображения в различных режимах работы радиолокатора ГРОЗА показаны на рис. 36 и 37.
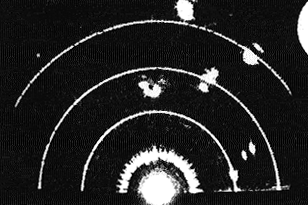
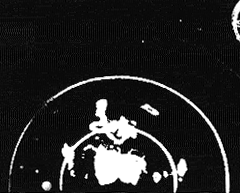
Рис. 36. Типичные радиолокационные изображения в режиме МЕТЕО
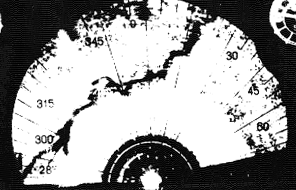
Рис. 37. Типичное изображение земной поверхности