

Встроенные функции
Таблица 3. Встроенные математические функции
|
Функции |
Аргументы |
Описание |
|
Тригонометрические функции: sin(x) cos(x) tan(x) cot(x) sec(x) csc(x) |
x - аргумент
|
Синус Косинус Тангенс Котангенс Секанс Косеканс |
|
Обратные тригонометрические функции: asin(x) acos(x) atan(x) |
x - аргумент
|
Арксинус Арккосинус Арктангенс |
|
Показательная функция: exp(x) |
x - аргумент |
Экспонента в степени х |
|
Логарифмические функции: ln(x) log(x) |
x - аргумент
|
Натуральный логарифм по основанию e Десятичный логарифм (по основанию 10) |
|
Гиперболические функции: sinh(x) cosh(x) tanh(x) coth(x) sech(x) csch(x) |
x - аргумент
|
Гиперболический синус Гиперболический косинус Гиперболический тангенс Гиперболический котангенс Гиперболический секанс Гиперболический косеканс |
|
Обратные гиперболические функции: asinh(x) acosh(x) atanh(x) |
x - аргумент
|
Обратный гиперболический синус Обратный гиперболический косинус Обратный гиперболический тангенс |
|
Функции комплексного аргумента: re(x) im(x) arg(x) |
x – аргумент функции |
Действительная часть комплексного числа Мнимая часть комплексного числа Аргумент комплексного числа |
|
Функции Бесселя: J0(x) J1(x) Jn(n,x) I0(x) I1(x) In(n,x) K0(x) K1(x) Kn(n,x) Y0(x) Y1(x) Yn(n,x) |
x - аргумент |
Функции Бесселя первого рода нулевого, первого и n-го порядка
Модифицированные функции Бесселя первого рода нулевого, первого и n-го порядка Модифицированные функции Бесселя второго рода нулевого, первого и n-го порядка Функции Бесселя второго рода нулевого, первого и n-го порядка
|
|
Гамма-функция: Gamma(x) Gamma(a,m) |
x - аргумент |
Гамма-функция комплексного аргумента Неполная Гамма-функция порядка а |
|
Функция ошибок: erf(x) erfc(x) |
x - аргумент |
Интеграл вероятностей (функция Крампа) Обратная функция ошибок |
Таблица 4. Функции для решения уравнений, систем уравнений и поиска экстремума
|
Функции |
Аргументы |
Описание |
|
Given |
|
Ключевое слово для систем уравнений, неравенств и т.п. |
|
Find(x1,x2,…) |
x1, x2,… - переменные |
Возвращает корень алгебраического уравнения (скаляр) или системы (вектор), определенных в блоке с Given |
|
polyroots(v) |
v – вектор, составленный из коэффициентов полинома |
Возвращает вектор всех корней полинома |
|
root(f(x,…),x,[a,b]) |
f(x,...) – функция x - переменная (a,b) - интервал поиска корня |
Возвращает корень функции |
|
Minerr(x1,x2,…) |
x1,x2,…- переменные |
Возвращает вектор приближенного решения системы уравнений и неравенств, определенных в блока Given |
|
Maximize(f,x1,…) |
f(x1,...) – функция x1,… - аргументы, по которым производится максимизация |
Вектор значений аргументов, при которых функция f достигает максимума (возможно задание дополнительных условий в блоке Given) |
|
Minimize(f,x1,…) |
f(x1,...) – функция x1,… - аргументы, по которым производится минимизация |
Вектор значений аргументов, при которых функция f достигает минимума (возможно задание дополнительных условий в блоке Given) |
Таблица 5. Функции с условиями сравнения
|
Функции |
Аргументы |
Описание |
|
Функции округления: ceil(x)
floor(x)
|
x - аргумент
|
Возвращает значение, округленное до ближайшего целого, большего или равного x Возвращает значение, округленное до ближайшего целого, меньшего или равного x |
|
Функция остатка: mod(x,y) |
x, y – аргументы |
Возвращает остаток от деления x на y со знаком делимого x |
|
Угол между точкой о осью OX: angle(x,y) |
x, y – координаты точки |
Положительный угол с осью OX для точки с координатами (x,y) |
|
Функция единичного скачка: |
|
|
|
Символ Кронекера: |
|
|
Таблица 6. Функции для решения задач линейной алгебры
|
Функции |
Аргументы |
Описание |
|
Функции для формирования матрицы с заданными свойствами: matrix(m,n,f)
diag(v)
identity(n)
augment(A,B,C,…)
stack(A,B,C,…)
submatrix(A,ir,jr,ic,jc)
Re(A)
m(A)
CreateSpace(F(t),t0,t1,tgrid, fmap)
CreatMesh(F(s,t),s0,s1,t0,t1,sgrid, tgrid,fmap) |
m – количество строк, n – количество столбцов f – функция v – вектор
n – размер матрицы A,B,C –векторы или матрицы
A,B,C –векторы или матрицы
A – матрица, ir, jr – номера строк ic, jc – номера столбцов A – матрица
A – матрица
F(t) – векторная функция из трех элементов t0,t1 – пределы t tgrid – число точек сетки по t fmap – функция преобразования координат F(s,t) – векторная функция из трех элементов t0,t1 – пределы t s0,s1 – пределы по s tgrid, sgrid – число точек сетки по t и s fmap – функция преобразования координат |
Заполнения матрицы A размерности (m, n) элементами ai,j, которые равны значению функции f(i,j)
Заполнение матрицы, на главной диагонали которой стоят элементы, соответственно равные элементам вектора v, а остальные элементы нулевые Создание единичной матрицы
Из нескольких матриц, имеющих одинаковое число строк, создается новая матрица, в первых столбцах которой расположены элементы матрицы A, а в последних столбцах – элементы последней матрицы Из нескольких матриц, имеющих одинаковое число столбцов, создается новая матрица, в первых строках которой расположены элементы матрицы A, а в последних строках – элементы последней матрицы Возвращает часть элементов матрицы A, расположенных на пересечении строк с номерами с ir по jr и столбцов с номерами с ic по jc, причем ir <= jr и ic <= jc Формирование матрицы, содержащей действительные части соответствующих комплексных элементов матрицы A Формирование матрицы, содержащей мнимые части соответствующих комплексных элементов матрицы A Создание вложенного массива, представляющего x-, y- и z – координаты параметрической пространственной кривой, заданной функцией F
Создание вложенного массива, представляющего x-, y- и z – координаты параметрической пространственной кривой, заданной функцией F |
|
Функции, реализующие алгоритмы мультипликативного разложения матриц: lu(A)
qr(A)
rref(A)
svd(A)
geninv(A)
|
A – квадратная матрица
A – вектор или матрица
А – матрица
A – прямоугольная матрица порядка m×n
A – прямоугольная матрица порядка m×n |
Представление матрицы A в виде A=L×U, где L – нижняя, а U – верхняя треугольная матрицы Представление прямоугольной матрицы A в виде A=Q×R, где Q – ортогональная матрица, а R – верхняя треугольная матрица Приведение матрицы А к ступенчатому виду с единичным базисным минором:
Для матрицы А вычисляется левая обратная матрица L порядка n×m, удовлетворяющая соотношению L×A=E, где E – единичная матрица порядка n×n |
|
Функции для вычисления характеристик матрицы: last(v)
length(v)
max(A)
min(A)
rows(A)
cols(A)
mean(A)
median(A)
tr(A)
rank(A)
norm1(A) – L1 norm2(A) – L2 norme(A) - евклидова normi(A) - ∞
cond1(A) – L1 cond2(A) – L2 conde(A) – евклидова condi(A) - ∞ |
v – вектор
v – вектор (одномерный массив) A - массив
A – массив
А – матрица или вектор А – матрица или вектор А - матрица или вектор А- массив
А – квадратная матрица А – матрица
A – квадратная матрица
A – квадратная матрица
|
Возвращает индекс последнего элемента вектора v Вычисляет количество элементов в одномерном массиве v
Вычисление максимального по величине элемента массива Вычисление минимального по величине элемента массива Возвращает количество строк в А
Возвращает количество столбцов в А Вычисление среднего значения элементов в А Вычисление медианы (величины, меньше или больше которой в массиве содержится одинаковое количество элементов) Вычисление следа квадратной матрицы А Вычисление ранга матрицы А (суммы диагональных элементов) Вычисление норм матрицы А в соответствии со следующими определениями:
здесь используются обозначения: λmax(AAT) – максимальное собственное значение матрицы AAT Вычисление чисел обусловленности матрицы А с использованием норм, описанных в предыдущем пункте |
|
Функции для перестановки элементов массива: sort(v)
reverse(v)
rsort(A,n)
csort(A,n) |
v- вектор
v- вектор
A- матрица, n – номер строки
A- матрица, n – номер строки |
Сортировка элементов вектора v в порядке возрастания их значений Сортировка элементов вектора v в порядке убывания их значений Перестановка столбцов матрицы А так, чтобы ее n-я строка оказалась отсортированной по возрастанию элементов Перестановка столбцов матрицы А так, чтобы ее n-й столбец оказался отсортированным по возрастанию элементов |
|
Функция, реализующие алгоритмы решения системы алгебраических уравнений: lsolve(A,b)
|
A – матрица системы линейных алгебраический уравнений, b- вектор правой части |
Возвращает вектор X, соответствующий численному решению сиcтемы n линейных уравнений вида A×X=b; матрица коэффициентов A имеет порядок n×n, векторы b и X – размерность n |
|
Функции, реализующие алгоритмы решения проблемы собственных значений: eigenvals(A)
eigenvec(A,f)
eigenvecs(A)
genvals(A,B)
genvecs(A,B) |
A- квадратная матрица
A- квадратная матрица, f- собственное значение
A- квадратная матрица
A,B квадратные матрицы A,B квадратные матрицы |
Возвращает вектор, содержащий собственные значения квадратной матрицы A Для заданной матрицы A и ее собственного значения f вычисляет принадлежащий этому собственному значению собственный вектор Для заданной матрицы A возвращает матрицу, столбцами которой являются собственные векторы матрицы A, причем, порядок их расположения соответствует порядку следования собственных значений, возвращаемых функцией eigenvals(A) Расчет обобщенных собственных значений Расчет обобщенных собственных векторов |
 Сингулярное
разложение матрицы A в
виде A=U×S×VT,
где U – ортогональная
матрица порядка n×n,
V – ортогональная
матрица порядка m×m,
S – диагональная
матрица, на главной диагонали которой
расположены сингулярные числа матрицы
А
Сингулярное
разложение матрицы A в
виде A=U×S×VT,
где U – ортогональная
матрица порядка n×n,
V – ортогональная
матрица порядка m×m,
S – диагональная
матрица, на главной диагонали которой
расположены сингулярные числа матрицы
А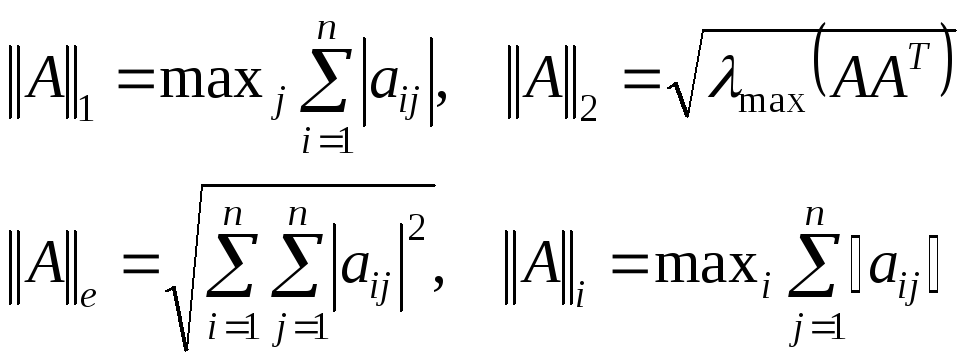
Таблица 7. Функции для численного решения дифференциальных уравнений
|
Функции |
Аргументы |
Описание |
|
Функции для численного решения задачи Коши для обыкновенных дифференциальных уравнений (ОДУ): odesolve(t,t1,step)
rkfixed(y,x0,xend,npoints,D)
Rkadapt(y,x0,xend,npoints,D)
rkadapt(y,x0,xend,acc,D,k,s)
Bulstoer(y,x0,xend,npoints,D)
bulstoer (y,x0,xend,acc,D,k,s) |
t - переменная интегрирования ОДУ t1 – конечная точка интервала интегрирования step – число шагов интегрирования ОДУ y- вектор начальных условий (x0,x1) – интервал интегрирования, npoints – число шагов интегрирования, D векторная функция, задающая систему ОДУ См. rkfixed
y- вектор начальных условий (x0,x1) – интервал интегрирования, D векторная функция, задающая систему ОДУ, acc – погрешность вычисления, k- максимальное число шагов интегрирования, s – минимальный шаг интегрирования См. rkfixed
См. rkadapt |
Возвращает матрицу с решением задачи Коши для одного ОДУ, определенного в блоке с Given и начальными условиями в точке t0
Возвращает матрицу с решением задачи Коши для системы ОДУ методом Рунге-Кутта четвертого порядка с постоянным шагом на отрезке [x0,xend]
Возвращает матрицу с решением задачи Коши для системы ОДУ методом Рунге-Кутта четвертого порядка с переменным шагом. Возвращает матрицу с решением задачи Коши для системы ОДУ методом Рунге-Кутта четвертого порядка с переменным шагом и заданной точностью (для определения только последней точки интервала)
Возвращает матрицу с решениями задачи Коши для системы ОДУ методом Булирша-Штера Возвращает матрицу с решениями задачи Коши для системы ОДУ методом Булирша-Штера (для определения только последней точки интервала)
|