

Кзп в неоднородном поле
>> x=sqrt(rand(1,70))*10;y=sqrt(rand(1,70))*10;plot(x,y,'.'),grid on
Коэффициент k в законе изменения плотности найдем из соотношения 70 = k 102102/4: k = 0,028. Для вычисления параметра a = iSi = kxiyiSi нужно знать координаты центра xi, yi и площадь каждого УА. Второй выходной параметр метода PolyRect\Area – массив площадей элементов, координаты центров можно получить методом PolyRect\Center:
>> [S,Si]=Area(T1), Ci=Center(T1)
S = 6.4500 Si = 1.5000 1.5000 0.7500 0.9000 0.9000 0.9000
Ci = 5.0000 3.5000 6.1250 6.8000 3.5000 3.5000
5.0000 5.0000 5.0000 5.0000 3.7500 6.2500
Вероятности поражения УА зададим вектором p, и вычислим вероятность поражения цели по формулам (2.16), (2.17):
>> p=[0.4 0.5 0.3 0.6 0.6 0.8]; K=0.028; G1=1-exp( -K*dot(prod(Ci),Si.*p))
G1 = 0.8816
Вероятности поражения цели еще в двух позициях на рис. 2.5 б:
>> T2=MoveTo(T,[7;8]);T3=MoveTo(T,[3;2]); show(T2,1,1,'y',1),show(T3,1,1,'c',1)
>> G2=1-exp(-K*dot(prod(Center(T2)),Si.*p)),G3=1-exp(-K*dot(prod(Center(T3)),Si.*p))
G2 = 0.9927 G3 =0.3789
|
Рис. 2.6. Фрагмент КЗП |
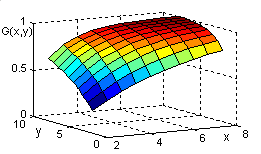
>> [I J]=meshgrid(linspace(-3,3,10),linspace(-3,3,10));
>> for i=1:100 m(i) =K*dot(prod(Center(Move(T,[I(i);J(i)]))),Si.*p); end
>> G=1-exp(-m); surf(I,J, reshape(G,size(I)))
Статистическое моделирование пуассоновского поля
Статистическое моделирование рассматривает действие по цели каждого осколка в отдельности. Сформируем неоднородное поле так же, как и раньше, но плотность на прямоугольниках вычислим не по исходному закону, а по статистике попаданий, которая может учесть и результаты работы процедур, моделирующих движение осколков после формирования поля до расчетного момента. Создадим сразу N экземпляров поля, а затем методом PolyRect\Impact определим число попаданий в каждый элемент объекта T1:
>> m=0;n=70;N=500; x=sqrt(rand(N,n))*10; y=sqrt(rand(N,n))*10;
>> L=zeros(1,6);for j=1:N*n k=Impact(T1,[x(j);y(j)]); if k>0 L(k)=L(k)+1;end,end
В данном случае после формирования поля с заданным распределением плотности никаких изменений не вносится, поэтому при большом N плотность в центре каждого прямоугольника должна приближаться к среднему числу попаданий в него, отнесенному к площади данного прямоугольника:
>> L1=K*prod(Ci), Ls1=L./Si/N
L1 = 0.7000 0.4900 0.8575 0.9520 0.3675 0.6125
Ls1 = 0.7053 0.4840 0.8427 0.9356 0.3978 0.6200
Статистические оценки оказались очень близкими к точным значениям. Таким образом, для вычисления среднего числа попаданий вместо формулы (2.17) можно использовать результаты статистического моделирования процессов разлета осколков. Это избавляет от необходимости оперировать с плотностью поля, что очень важно, поскольку из статических испытаний известно распределение осколков относительно неподвижного снаряда, а плотность поля в целевой системе координат нельзя получить корректно простыми преобразованиями.
Контрольные вопросы и задачи
-
Чем отличается стохастически равномерное поле от равномерного распределения узловых точек в узлах равномерной сетки?
-
Случайное событие A2, 4 – ровно m = 2 попадания в n = 2 независимых выстрелах. Выразите это событие через события Ak – попадание в k -м выстреле. Примените к полученному выражению теоремы сложения и умножения вероятностей. Обобщите результат для произвольных m, n.
-
Какова вероятность не менее K = 3 успехов в n = 10 испытаниях Бернулли с вероятностью успеха в каждом повторении p = 0,3?
-
Как вычислить вероятность не более K = 3 успехов в n = 100 испытаниях Бернулли с вероятностью успеха в каждом повторении p = 0,03?
-
Как получено выражение для вероятности данной комбинации числа событий в серии испытаний Бернулли с более, чем двумя возможными исходами?
-
Как получено выражение для вероятности данного числа успехов в серии независимых испытаний, когда вероятности успехов в разных испытаниях не одинаковы?
-
Объясните доказательство теоремы Пуассона.
-
На каком основании можно считать осколочное поле пуассоновским или простейшим пуассоновским?
-
Простейшее пуассоновское поле точек на плоскости имеет плотность 0,5. Какова вероятность попадания хотя бы одной точки в круг единичного радиуса?
-
Плотность нестационарного пуассоновского потока отказов линейно возрастает по закону (t) = a + b t. Какая вероятность того, что в интервале времени [t1, t2] не будет отказов?
-
Объясните вероятностный смысл координатного закона поражения.
-
Объясните вероятностный смысл функции уязвимости.
-
Чем объясняется возрастание КЗП от начала координат на рис. 2.8?
-
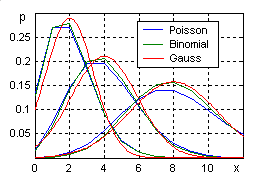
Выполнить количественную оценку степени приближения легко с помощью электронных формул. Построить многоугольники биномиального распределения при n = 40, p = 0,1 и Пуассона с параметром = np = 4, а также график аппроксимирующей функции (2.9), повторить эту процедуру при n = 40, p = 0,2 и n = 40, p = 0,05.
Решение:
>> n=40; p=0.1; B=p_Binom(p,n); P=f_Poisson(n*p,n);
>> x=0:0.1:n; s=sqrt(n*p*(1-p)); G=f_Gauss((x-n*p)/s)/s;
>> plot(0:n, P, 0:n, B, x, G)
|
Рис. 2.1. Погрешности аппроксимации биномиальной формулы |
ПРИЛОЖЕНИЕ к лекции 2
Листинг 2.1. Функция p_Binom
%Вычисляет вероятности возможного числа успехов (от 0 до n
% или заданного массивом m) в испытаниях Бернулли с параметрами n, p.
function out = p_Binom(p,n,m)
if nargin<3 m=0:n; end;
for i=1:length(m) out(i)=f_Binom(p,n,m(i)); end
%
function out = f_Binom(p,n,m)
out = CombiCount(n,m)*p^m*(1-p)^(n-m);
Листинг 2.2. Функция Гаусса f_Gauss
%Вычисляет функцию Гаусса
function f= f_Gauss(x)
f=exp(-x.^2/2)/sqrt(2*pi);
Листинг 2.3. Функция Trap
% Интегрирование методом трапеций
function out = Trap(f,x)
dx=diff(x); out=dot(f, [dx(1)/2 dx(1:end-1) dx(end)/2]);
Листинг 2.4. Функция Лапласа от скалярного аргумента f_Laplas
%Вычисляет функцию Лапласа
function out= f_Laplas(x)
t=linspace(0,x,50);
out=Trap(f_Gauss(t),t);
Листинг 2.5. Функция Лапласа от векторного аргумента f_LaplasV
%Вычисляет функцию Лапласа для всех элементов входного массива x
function F = f_LaplasV(x)
F=zeros(size(x)); n=prod(size(x));
for i=1:n F(i)=f_Laplas(x(i)); end
Листинг 2.6. Обратная функция Лапласа ArgLaplas
%Вычисляет аргумент функции Лапласа по ее значению
% По значению функции Лапласа вычисляет ее аргумент
%
function out = ArgLaplas(Ver)
for i=1:length(Ver)
out(i)=ArgLaplas_(Ver(i));
end
function X = ArgLaplas_(Ver)
x=linspace(0,4,200);dx=4/199;
I=find(cumsum(f_Gauss(x)*dx)-Ver>0);
X=x(I(2)); X=X+(Ver-f_Laplas(X))/f_Gauss(X);
Листинг 2.7. Формула Пуассона p_Poisson
% Вычисляет вероятности числа успехов по формуле Пуассона с параметром lambda;
% числа успехов задает вектор m,
% или 0:m, если m –отрицательный скаляр
%
function out= p_Poisson(lambda,m)
expa=exp(-lambda);
if length(m)>1
for i=1:length(m)
out(i)=a^m(i)*expa/factorial(m(i));
end
else
out(1)=expa;
for i=1:abs(m)
out(i+1)=out(i)*a/(i);
end
if m>0 out=out(end); end
end
Листинг 2.8. Обобщенная формула Бернулли RptTrial
% Вычисляет распределение вероятности числа успехов
% в n независимых испытаниях в одинаковых условиях (P - скаляр)
% или разных (в векторе P вероятности успеха в каждом испытании)
function [out, out2] = RptTrial(P,n)
if nargin>1 & length(P)==1 P(n)=P; end
if nargin==1 n=length(P);end
if length(n)==1 n=1:n; end
P=P(n);Q=1-P;
syms Z X;
X=strcat('[',strrep(char(expand(prod(P*Z+1-P))),'+',' '),']');
out2 = subs(X,Z,1); out = out2([end:-1:1]);
Листинг 2.9. Оценка вероятностей успеха в испытаниях Бернулли по частоте успехов.
% Вычисляет границы доверительного интервала вероятностей успеха
% в n испытаниях Бернулли по числу успехов pm при доверительной вероятности P
function p=I_Binom(pm,n,P)
p=[0,0];
if pm==0 p(2)=min_Binom(1-P,n,0);
elseif pm==n p(1)=1-min_Binom(1-P,n,1); p(2)=1;
else
x=pm/n;
t=ArgLaplas(P/2)^2/n;
A=1+t;
B=x+t/2;
C=x^2;
D=sqrt(B.^2-A*C);
p=[(B-D)/A,(B+D)/A];
end
%
function p=Min__Binom(P,n,x)
d=0.01; p=0.01; r=0;eps=0.0001;
for i=1:6
p=Fnd_Binom(P,n,x,p*0.9,-d);
if abs(r-p)<eps break; end
d=d/10;r=p;
end
Листинг 2.10. Функция оптимизирует параметры закона для аппроксимации зависимости дискретных реализаций F(x).
% Approx оптимизирует параметры выражения, аппроксимирующего функцию F(x)
% Law – аппроксимирующее выражение в виде строки символов
% x,F – массивы значений аргумента и функции
% P – исходное приближение (вектор) параметров аппроксимирующего выражения
function [Fun,Par]=Approx(Law,x,F,P)
Goal=inline(['sum((' Law '-F).^2)'],'P','x','F');
Par=fminsearch(Goal,P,optimset('MaxIter',200,'TolX',0.0001), x,F);
Fun=inline(Law,'x','P');