

Shamrov_M_I_Telnov_G_G_Organizatsia_ustroystv_na_baze_protsessorov_maloy_razryadnosti
.pdf– 60 –
Настройка ППИ на выполнение различных типов операций ввода-вывода осуществляется путем загрузки регистра управляющего слова. На рис. 15 приведен формат управляющего слова настройки каналов ППИ для обмена в различных режимах (D7=1).
Возможна организация трех режимов обмена: 0, 1, 2. По сигналу RESET все каналы настраиваются на ввод в режиме 0.
На рис. 16 приведен формат управляющего слова для установки отдельных разрядов канала С (D7=0). Номер устанавливаемого бита задается разрядами D3–D1, а устанавливаемое значение – в разряде D0. Такое управляющее слово введено для удобства изменения отдельных разрядов канала С, особенности которого описаны ниже.
Рис. 15. Формат управляющего слова выбора режимов ППИ
– 61 –
Рис. 16. Формат управляющего слова для установки отдельных разрядов канала С
Врежиме 0 обмен между каналами ППИ и периферийными устройствами осуществляется без дополнительных сигналов, стробирующих обмен. В этом случае ППИ может рассматриваться как устройство, состоящее из четырех портов: два 4-разрядных РС3–РС0, РС7–РС4 и два 8-разрядных РА7–РА0, РВ7–РВ0. (Канал
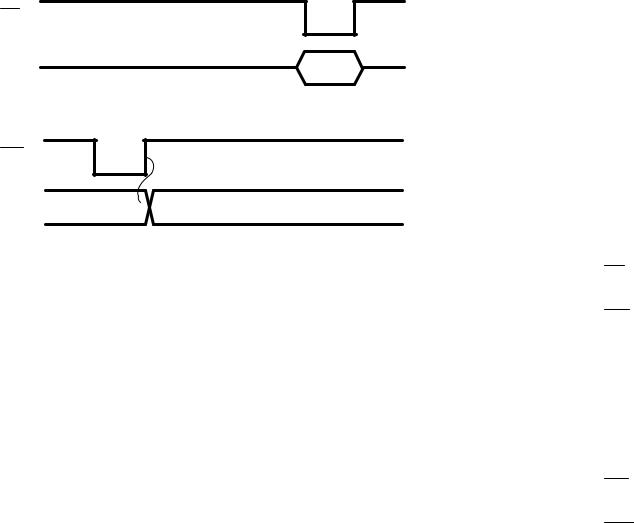
Симеет смысл рассматривать как два раздельных 4-разрядных порта только при их различной настройке: один на ввод, другой на вывод.) Вывод осуществляется командой OUT с фиксацией выдаваемой информации в регистрах каналов. Ввод информации осуществляется командой IN без фиксации в регистрах каналов (происходит только передача данных, поданных на вход соответствующего канала на шину D7–D0). Возможен ввод информации, предварительно выведенной в порты. Временные диаграммы функционирования ППИ в режиме 0 приведены на рис. 17, 18.
Врежиме 1 ППИ обеспечивает стробируемый однонаправленный обмен информацией между каналами ППИ и периферийными устройствами. В этом режиме могут работать каналы А и В, а для передачи управляющих сигналов используются по три линии канала С.
– 62 –
RD
PA7-PA0,
PB7-PB0, данные PC7-PC0
Рис. 17. Временная диаграмма ввода в режиме 0
WR
PA7-PA0,
PB7-PB0,  данные PC7-PC0
данные PC7-PC0
Рис. 18. Временная диаграмма вывода в режиме 0
При этом остальные линии канала С могут быть настроены на ввод или вывод в режиме 0. В качестве управляющих сигналов для каждого из каналов А и В используются три сигнала:
−сигнал готовности передающего устройства (периферийного устройства при вводе или канала при выводе) к выдаче информации;
−сигнал подтверждения приема информации от принимающего устройства (канала при вводе или периферийного устройства при выводе);
−сигнал прерывания, информирующий микропроцессор о завершении операции ввода-вывода и готовности канала ППИ к чтению принятого байта командой IN (при вводе) или готовности канала ППИ к приему от микропроцессора по команде OUT очередного байта для передачи периферийному устройству (при выводе). Сигнал прерывания вырабатывается в ППИ при
– 63 –
установленном в единицу сигнале разрешения прерывания от соответствующего канала. Сигнал разрешения берется из фиксированного разряда канала С, который устанавливается с помощью управляющего слова побитной установки (см. рис. 16).
Сигналы готовности, подтверждения и запроса на прерывание вырабатываются ППИ автоматически. Предусмотрена возможность чтения их из канала С командой IN для последующего программного анализа.
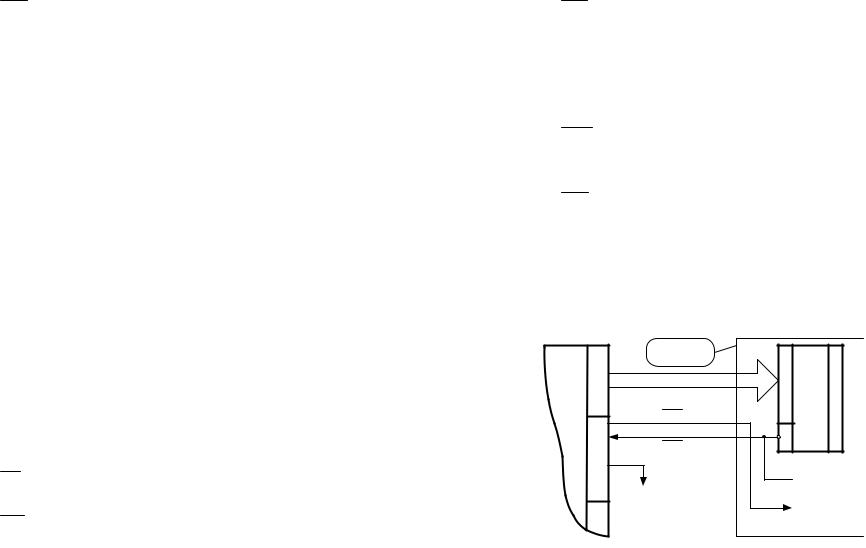
Пример использования ППИ для вывода в режиме 1 показан на рис. 19. Назначение выводов ППИ в режиме 1 представлено на рис. 20, 22. Временные диаграммы функционирования ППИ в режиме 1 приведены на рис. 21, 23. Сигналы, приведенные на временной диаграмме ввода в режиме 1 (см. рис. 21):
−RD – сигнал чтения из ППИ (см. табл. 6). Выдается микропроцессором при исполнении команды IN;
−STB (Strobe) – сигнал выдачи данных периферийным устройством;
−IBF (Input Buffer Full) – сигнал подтверждения приема данных от ППИ;
−INTR (Interrupt Request) – запрос на прерывание микропроцессору.
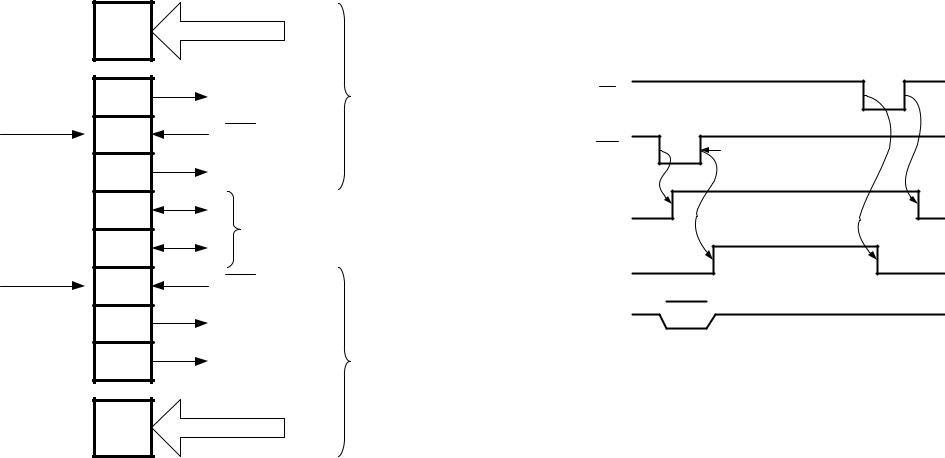
Сигналы, приведенные на временной диаграмме вывода в режиме 1 (см. рис. 23):
−WR – сигнал записи в ППИ (см. табл. 6). Выдается микропроцессором при исполнении команды OUT;
−ACK (Acknowledge) – сигнал подтверждения приема от периферийного устройства;
–64 –
−OBF (Output Buffer Full) – сигнал готовности к выдаче данных от ППИ;
−INTR (Interrupt Request) – запрос на прерывание микропроцессору.
Режим 1 позволяет организовать между ППИ и периферийным устройством асинхронный обмен с квитированием.
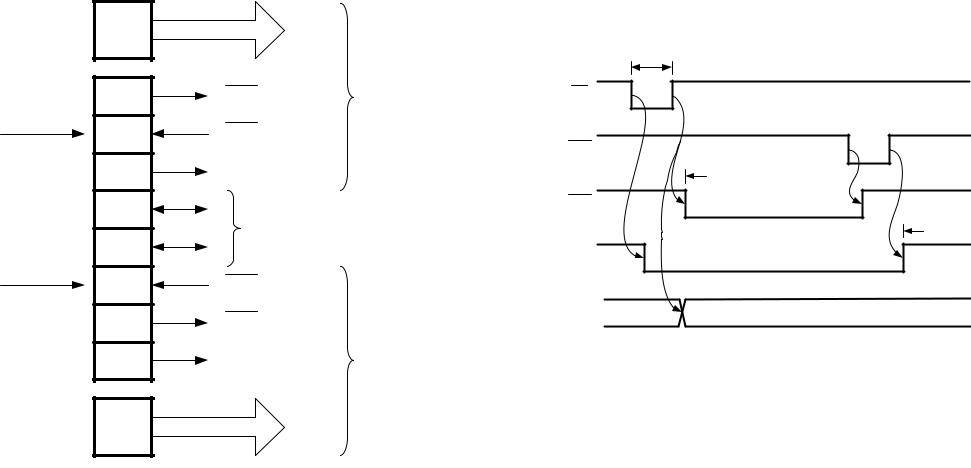
В режиме 2 ППИ обеспечивает стробируемый двунаправленный обмен данными между каналом ППИ и периферийным устройством. В этом режиме может работать только канал А, а для передачи управляющих сигналов используется пять линий канала С. Канал В и оставшиеся три линии канала С могут работать в режимах 0, 1. Режим 2 отличается от режима 1 тем, что операции ввода и вывода через канал могут чередоваться в произвольном порядке без перенастройки канала. Возможен, например, прием байта данных от периферийного устройства (операция ввода) и затем запись байта данных в тот же канал ППИ командой OUT (операция вывода). Для одновременного хранения вводимых и выводимых байт, канал А ППИ имеет два внутренних регистра данных. Назначение выводов ППИ в режиме 2 представлено на рис.
24.Временные диаграммы функционирования ППИ в режиме 2 приведены на рис. 25.
Сигналы, приведенные на временной диаграмме вводавывода в режиме 2 (см. рис. 25):
−RD – сигнал чтения из ППИ (см. табл. 6). Выдается микропроцессором при исполнении команды IN;
−WR – сигнал записи в ППИ (см. табл. 6). Выдается микропроцессором при исполнении команды OUT;
–65 –
−STB (Strobe) – сигнал выдачи данных периферийным устройством при операции ввода (источник сигнала – периферийное устройство);
−IBF (Input Buffer Full) – сигнал подтверждения приема данных ППИ от периферийного устройства при операции ввода (источник сигнала – ППИ);
−ACK (Acknowledge) – сигнал подтверждения приема данных периферийным устройством от ППИ при операции вывода (источник сигнала – периферийное устройство);
−OBF (Output Buffer Full) – сигнал готовности ППИ к выдаче данных при операции вывода (источник сигнала – ППИ);
−INTR (Interrupt Request) – общий запрос на прерывание микропроцессору и от ввода и от вывода.
Режим 2 позволяет организовать между ППИ и периферийным устройством двунаправленный асинхронный обмен с квитированием.
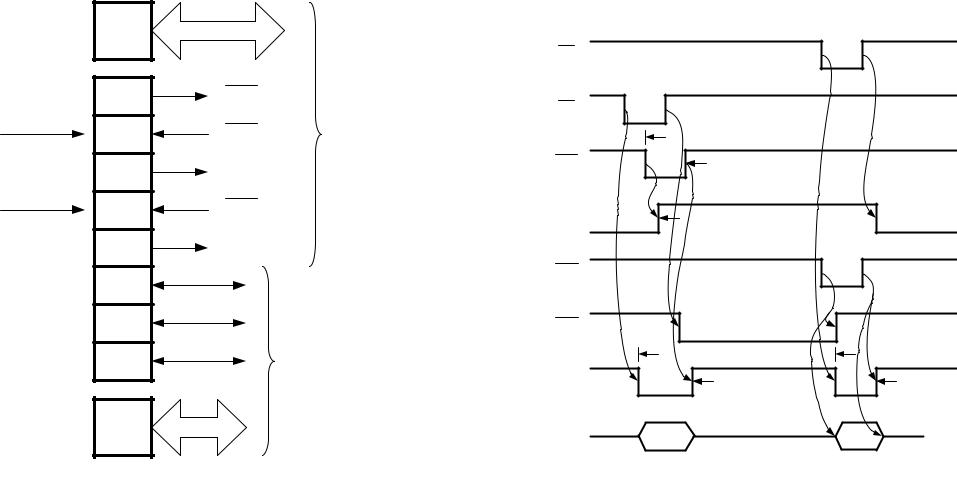
Рис. 19. Сопряжение ППИ с периферийным устройством при выводе в режиме 1
Разрешение
прерывания от канала А
Разрешение
прерывания от канала B
PA
PC5
PC4
PC3
PC6
PC7
PC2
PC1
PC0
PB
– 66 –
К
а
н
IBF а
л
STB
А
INTR
Ввод – вывод в режиме 0
STB
IBF |
К |
а |
|
INTR |
н |
а |
|
|
л |
|
B |
Рис. 20. Сигналы ППИ при вводе в режиме 1
– 67 –
Ввод данных в микропроцессор 

RD
 Данные готовы
Данные готовы
STB |
Окончание передачи данных |
 Входной буфер ППИ заполнен
Входной буфер ППИ заполнен
IBF
 Запрос на ввод данных микропроцессору
Запрос на ввод данных микропроцессору
INTR
PA7-PA0,  данные
данные 
PB7-PB0
Рис. 21. Временная диаграмма ввода в режиме 1
– 68 – |
– 69 – |
Вывод данных из микропроцессора
WR
 Данные приняты
Данные приняты
ACK
|
Данные в выходном буфере ППИ |
|
OBF |
|
|
|
Запрос на |
|
|
вывод |
|
INTR |
следующего |
|
байта данных |
||
PA7-PA0, |
данные |
|
PB7-PB0 |
||
|
Рис. 23. Временная диаграмма вывода в режиме 1
Рис. 22. Сигналы ППИ при выводе в режиме 1
– 70 –
Рис. 24. Сигналы ППИ при вводе-выводе в режиме 2
– 71 –
Ввод данных D2 в микропроцессор 

RD

 Вывод данных D1 из микропроцессора
Вывод данных D1 из микропроцессора
WR
|
Данные D2 готовы |
STB |
Окончание передачи данных D2 |
IBF |
Данные D2 во входном буфере ППИ |
 Данные D1 приняты
Данные D1 приняты
ACK
 Данные D1 в выходном буфере ППИ
Данные D1 в выходном буфере ППИ
OBF
|
Сброс запроса на вывод D1 |
Сброс запроса на ввод D2 |
INTR |
|
Запрос на вывод |
Запрос на ввод D2 |
следующего после |
|
|
|
D1 байта данных |
PA7-PA0 |
D2 |
D1 |
Рис. 25. Временная диаграмма ввода-вывода в режиме 2
–72 –
6.2.Организация процедур ввода-вывода
сиспользованием ППИ
Для выполнения обмена информацией между периферийными устройствами и процессором через ППИ могут быть использованы два основных способа:
−программно управляемый обмен;
−программно управляемый обмен с прерываниями.
В первом случае между ППИ и периферийным устройством может быть реализован как синхронный обмен, так и асинхронный обмен с квитированием.
Синхронный обмен выполняется без использования стробирующих сигналов (режим 0 ППИ). Обычно этот способ используется для связи с цифровыми датчиками или исполнительными механизмами при использовании микроЭВМ в контуре управления.
Асинхронный обмен с квитированием используется при подключении ППИ к периферийному устройству, вырабатывающему сигналы готовности к выдаче данных в ППИ при операциях ввода или подтверждения приема данных из ППИ при операциях вывода. Формирование аналогичных сигналов в ППИ может быть выполнено программным путем в режиме 0, путем побитной установки разрядов порта С и программного опроса входных сигналов, а также аппаратным путем в режимах 1 и 2 без использования линий запросов на прерывания. Моменты завершения операций ввода-вывода при этом могут быть определены путем программного опроса (поллинга) канала С, в котором состояния управляющих сигналов доступны для считывания командой IN.
– 73 –
Во втором случае, при организации программно управляемого обмена с прерываниями, ППИ может использоваться в режиме 1 или 2. При этом обмен управляющими сигналами между ППИ и периферийным устройством при передаче информации выполняется без участия микропроцессора. В момент завершения операции обмена происходит выдача из ППИ запроса на прерывание микропроцессору. Пример такого использования ППИ – см. рис. 19.
При организации программно управляемого обмена с прерываниями возможна одновременная работа микропроцессора по выполнению основной программы и ППИ, реализующего обмен очередным байтом информации с периферийным устройством. После завершения операции обмена микропроцессор прерывает свою работу по запросу от ППИ и осуществляет переход к программе обработки прерывания. При этом происходит автоматический запрет прерываний в микропроцессоре.
Если запросы прерывания от нескольких каналов объединяются в один, или ППИ функционирует в режиме 2, когда выдается только объединенный запрос прерывания по вводу и выводу, уточнение источника прерывания возможно с помощью программного опроса (поллинга) канала С в подпрограмме обработки прерывания. Далее подпрограмма обработки прерывания считывает из ППИ с помощью команды IN принятые от периферийного устройства данные (при вводе) или записывает в ППИ с помощью команды OUT данные для передачи их периферийному устройству (при выводе). После этого необходимо изменить значение текущего адреса массива данных в памяти, куда записываются вводимые данные или откуда читаются выводимые. Момент окончания всей операции обмена заданным количеством информации проверяется в программе обработки прерывания, например путем проверки на
– 74 –
нуль содержимого счетчика данных, уменьшаемого при каждом исполнении программы на единицу. Перед командой возврата из программы обработки прерывания должна находиться команда разрешения прерываний.
В основной программе для выполнения программно управляемого обмена с прерываниями необходимо установить начальное значение счетчика данных и начальный адрес области данных в памяти микроЭВМ, в который должны быть помещены вводимые данные или из которого должны быть взяты выводимые. После этого необходимо настроить ППИ на требуемый режим работы, в том числе разрешить выдачу сигналов прерывания от соответствующих каналов ППИ. Далее необходимо разрешить прерывания в микропроцессоре (если они запрещены) с помощью команды EI.
Более подробное описание способов организации процедур ввода-вывода через ППИ можно найти, например, в [2, 3].
6.3. Описание платы М2
Лабораторная работа № 5 выполняется с помощью учебной микроЭВМ УМК и платы М2. Плата М2 предназначена для расширения функциональных возможностей УМК:
−подключения периферийных устройств через БИС программируемого параллельного интерфейса К580ВВ55А;
−увеличения объема памяти.
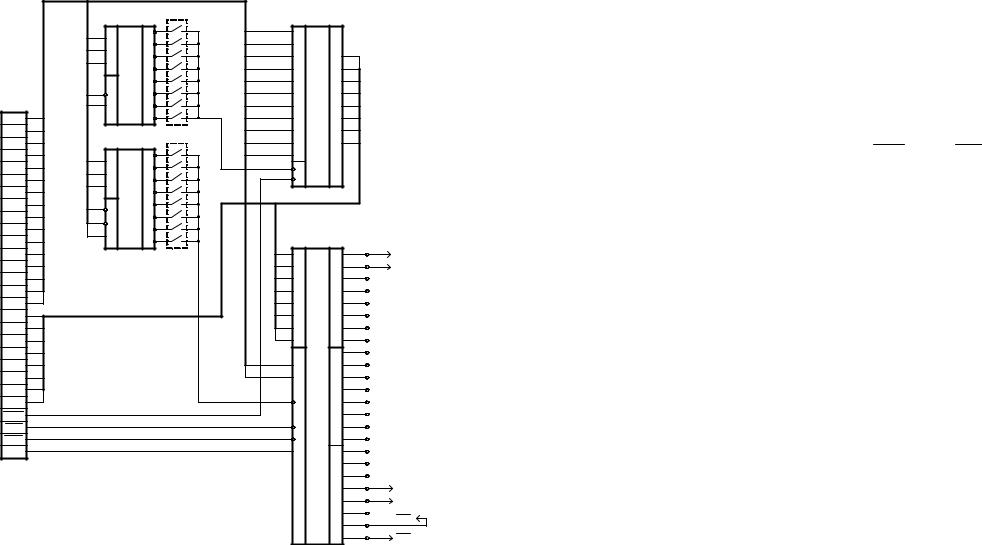
Функциональная схема платы М2 приведена на рис. 26. Увеличение объема памяти достигается подключением к шинам УМК БИС ПЗУ с ультрафиолетовым стиранием емкостью 2К байт (микросхема К537РФ2). Адреса ПЗУ не пересекаются с адресами
– 75 –
внутреннего ОЗУ и ПЗУ УМК и задаются блоком переключателей SA1, подключенным к выходам неполного дешифратора DC1 старших 5 разрядов шины адреса УМК. При включении одного из переключателей соответствующий выход дешифратора подключается к входу выборки ПЗУ. Номера переключателей в блоке SA1 и назначаемые ими диапазоны адресов ПЗУ приведены в табл. 7. Выдача байта из ПЗУ на шину данных УМК разрешается сигналом
MRDC , формируемым в УМК.
Функции ввода-вывода на плате М2 реализуются с помощью БИС ППИ К580ВВ55А. Обмен данными между ППИ и микропроцессором осуществляется через шину данных УМК. Выбор типа операции осуществляется стандартными сигналами УМК: для
чтения – IORC , для записи – IOWC . Начальная установка ППИ выполняется по сигналу RESET. Адресация внутренних регистров ППИ осуществляется сигналами А1, А0 и сигналом выборки ППИ. Входы А1, А0 подключены к соответствующим разрядам шины адреса.
Таблица 7
Назначение адресов ПЗУ
Номер переключателя |
Диапазон адресов |
|
|
|
|
1 |
8000Н – 87FFH |
|
2 |
8800H |
– 8FFFH |
|
|
|
3 |
9000H |
– 97FFH |
|
|
|
4 |
9800H |
– 9FFFH |
5 |
A000H – A7FFH |
|
6 |
A800H – AFFFH |
|
7 |
B000H – B7FFH |
|
8 |
B800H – BFFFH |
|
|
|
|
|
|
|
– 76 – |
|
|
|
|
|
|
|
|
|
|
SA1 |
|
|
|
|
|
|
|
|
|
|
|
1 |
1 |
|
|
|
|
|
|
|
12 |
DC1 |
0 |
|
A0 |
ПЗУ |
|
|
|
|
|
|
|
2 |
|
|
|
|||||
|
|
13 |
X0 |
1 |
|
A1 |
|
|
|
|
|
|
|
X1 |
|
3 |
|
|
|
1 |
|||
|
|
14 |
2 |
|
A2 |
|
D0 |
|
|||
|
|
X2 |
|
4 |
|
|
2 |
||||
|
|
|
3 |
|
A3 |
|
D1 |
|
|||
|
|
|
|
|
|
|
|
3 |
|||
|
|
|
|
4 |
|
5 |
A4 |
|
D2 |
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
15 |
& |
5 |
|
6 |
A5 |
|
D3 |
|
4 |
|
|
|
|
|
|
|
|||||
|
|
16 |
|
7 |
|
|
5 |
||||
|
|
V |
6 |
|
A6 |
|
D4 |
|
|||
|
|
|
8 |
|
|
|
6 |
||||
A0 |
1 |
|
|
7 |
8 |
|
|
|
|
||
|
|
|
A7 |
|
D5 |
|
|||||
|
|
|
|
|
|
|
|
||||
A1 |
2 |
|
|
|
|
9 |
A8 |
|
D6 |
|
7 |
|
|
|
|
SA2 |
|
|
|
8 |
|||
A2 |
3 |
|
|
|
10 |
A9 |
|
D7 |
|
||
|
|
|
|
1 |
11 |
|
|
|
|||
|
4 |
|
|
|
|
|
|
|
|
||
A3 |
|
DC2 |
0 |
|
A10 |
|
|
|
|
||
3 |
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|||||
A4 |
5 |
|
X0 |
1 |
|
|
CS |
|
|
|
|
6 |
4 |
X1 |
|
|
2K x 8 |
|
|
|
|||
A5 |
|
5 |
X2 |
2 |
|
|
OE |
|
|
|
|
7 |
|
|
|
|
|
|
|
||||
A6 |
|
3 |
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
||
A7 |
8 |
6 |
|
4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
A8 |
9 |
7 |
& |
5 |
|
|
|
|
|
|
|
10 |
|
|
|
|
|
|
|
||||
A9 |
8 |
V |
6 |
|
|
|
|
|
|
|
|
11 |
8 |
|
|
|
|
|
|
||||
A10 |
|
|
7 |
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
1 |
|
|
|
|
||
A11 |
12 |
|
|
|
|
|
ППИ |
|
4 |
A0 |
|
13 |
|
|
|
|
|
D0 |
A0 |
3 |
|||
A12 |
|
|
|
|
|
2 |
|
A1 |
A1 |
||
|
|
|
|
|
|
D1 |
|
|
|||
A13 |
14 |
|
|
|
|
|
3 |
|
A2 |
|
|
|
|
|
|
|
|
D2 |
|
|
|
||
A14 |
15 |
|
|
|
|
|
4 |
|
A3 |
|
|
16 |
|
|
|
|
|
D3 |
|
|
|
||
A15 |
|
|
|
|
|
5 |
|
A4 |
|
|
|
|
|
|
|
|
|
D4 |
|
|
|
||
D0 |
1 |
|
|
|
|
|
6 |
|
A5 |
|
|
|
|
|
|
|
|
D5 |
|
|
|
||
D1 |
2 |
|
|
|
|
|
7 |
|
A6 |
|
|
|
|
|
|
|
|
D6 |
|
|
|
||
D2 |
3 |
|
|
|
|
|
8 |
|
|
|
|
|
|
|
|
|
D7 |
|
A7 |
|
|
||
|
|
|
|
|
|
|
|
|
|||
D3 |
4 |
|
|
|
|
|
|
|
B0 |
|
|
|
|
|
|
|
1 |
|
|
|
|
||
D4 |
5 |
|
|
|
|
A0 |
|
B1 |
|
|
|
|
|
|
|
|
2 |
|
|
|
|||
D5 |
6 |
|
|
|
|
A1 |
|
B2 |
|
|
|
|
|
|
|
|
|
|
|
|
|||
D6 |
7 |
|
|
|
|
|
|
|
B3 |
|
|
8 |
|
|
|
|
|
|
|
|
|
||
D7 |
|
|
|
|
|
CS |
|
B4 |
|
|
|
|
|
|
|
|
|
|
|
|
|||
MRDC |
|
|
|
|
|
|
|
|
B5 |
|
|
IORC |
|
|
|
|
|
|
RD |
|
B6 |
|
|
IOWC |
|
|
|
|
|
|
WR |
|
B7 |
|
|
RESET |
|
|
|
|
|
|
RES |
|
C0 |
|
|
|
|
|
|
|
|
|
|
|
C1 |
|
|
|
|
|
|
|
|
|
|
|
C2 |
|
|
|
|
|
|
|
|
|
|
|
C3 |
17 |
INTR |
|
|
|
|
|
|
|
|
|
C4 |
13 |
PC4 |
|
|
|
|
|
|
|
|
|
C5 |
|
ACK |
|
|
|
|
|
|
|
|
|
C6 |
11 |
|
|
|
|
|
|
|
|
|
|
C7 |
10 |
OBF |
Рис. 26. Функциональная схема платы М2
– 77 –
Адреса внутренних регистров (портов) ППИ задаются блоком переключателей SA2, подключенным к выходам неполного дешифратора DC2 старших 6 разрядов адреса порта УМК. При включении одного из переключателей соответствующий выход дешифратора подключается к входу выборки ППИ. Номера переключателей в блоке SA2 и назначаемые ими диапазоны адресов внутренних регистров (портов) ППИ приведены в табл. 8. Выводы
ППИ РА0(А0), РА1(А1), РС3(INTR), РС4, РС6( ACK ), РС7( OBF )
выведены на контактные площадки для удобства подключения осциллографа.
Таблица 8
Назначение адресов портам ППИ
Номер переключателя |
Диапазон адресов |
1 |
80Н – 83H |
2 |
84H – 87H |
3 |
88H – 8BH |
|
|
4 |
8CH – 8FH |
|
|
5 |
90H – 93H |
|
|
6 |
94H – 97H |
7 |
98H – 9BH |
8 |
9CH – 9FH |
В блоках переключателей SA1 и SA2 переключатель с номером 1 окрашен в темный цвет. Блок переключателей SA1, определяющий адреса ПЗУ, расположен на плате в позиции D1 (при рабочем положении платы находится ниже, чем SA2). Блок переключателей SA2, определяющий адреса портов ППИ, расположен на плате в позиции В2 (при рабочем положении платы
– 78 –
находится выше, чем SA1). Во всех блоках должен быть включен переключатель темного цвета (номер 1). Таким образом, ПЗУ назначаются адреса 8000H–87FFH в адресном пространстве памяти, а портам ППИ – адреса 80H–83H в адресном пространстве портов ввода-вывода. Изменять положение переключателей запрещено.
6.4. Описание платы ПС
Лабораторная работа № 6 выполняется с помощью учебной микроЭВМ УМК и платы ПС. Плата ПС предназначена для расширения функциональных возможностей УМК:
−ввода информации с клавиатуры;
−вывода информации на светодиодную матрицу 5×8;
−увеличения объема памяти.
Функциональная схема платы ПС приведена на рис. 27. Увеличение объема памяти достигается за счет подключения БИС ПЗУ с ультрафиолетовым стиранием К537РФ2. ПЗУ назначены адреса 8000Н–87FFН в адресном пространстве памяти. Портам ППИ назначены адреса 00Н–03Н в адресном пространстве портов ввода-вывода. Изменение указанных адресов невозможно.
Ввод информации от клавиш блока SA осуществляется через канал А ППИ. Обращение к каналу А выполняется по адресу 00Н.
Вывод информации на светодиодную матрицу осуществляется через канал В (адрес 01Н) и канал С (адрес 02Н) ППИ. Для свечения светодиода, находящегося на пересечении i-й строки и j-го столбца необходимо через канал B в i-м разряде и через канал С в j-м разряде выдать 0. При этом на анод будет подано +5В, а катод светодиода через открытый транзистор будет подключен к нулю.
– 79 –
Настройка ППИ на режим должна осуществляться путем загрузки константы 90Н в регистр управляющего слова (адрес 03Н).
При статическом режиме индикации набор светящихся светодиодов определяется парой кодов, выдаваемых через каналы В и С. При невозможности такой реализации (например, свечение светодиодов по диагонали матрицы) может быть использован динамический режим индикации, при котором информация последовательно во времени выводится построчно, то есть в любой момент «подключаются» только светодиоды одной строки. В остальных строках видимое свечение сохраняется за счет инерционности светодиодов и глаза человека.
В ПЗУ платы ПС записана программа, осуществляющая при нажатии какой-либо клавиши на клавиатуре зажигание соответствующего столбца. Начальный адрес программы – 8000Н. Программа может быть использована для проверки работоспособности платы.
Программа использует в своей работе подпрограмму индикации на светодиодной матрице содержимого ячеек памяти с адресами 0801Н–0805Н. Ячейка с адресом 0801Н должна содержать код для отображения в верхней строке светодиодной матрицы, а ячейка с адресом 0805 – код для отображения в нижней строке матрицы. При этом старший бит байта управляет крайним правым светодиодом в строке, а младший бит байта – крайним левым. Единичное значение бита соответствует зажженному светодиоду, нулевое – погашенному. (Подпрограмма инвертирует байты перед выдачей в порт). Начальный адрес подпрограммы – 8065Н. Подпрограмма может быть вызвана из программ пользователя.
Текст программы, записанной в ПЗУ платы ПС, приведен на рис. 28.