

18. Динамическая балансировка ротора на станке.
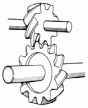
Схема динамического уравновешивания деталей
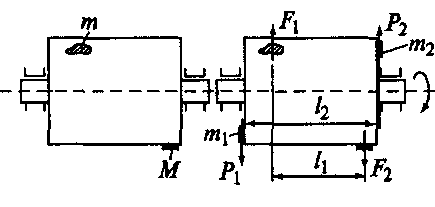
m — масса ротора; m и m2 — неуравновешенные, приведенные к плоскостям массы ротора; М — масса уравновешивающего груза; Рг — неуравновешенные центробежные силы; Р и Р2 — уравновешивающие центробежные силы; /1, /2 — плечи указанных сил
Динамической балансировке обычно подвергают детали, длина которых равна или больше их диаметра. На рисунке показан динамически отбалансированный ротор, у которого масса m уравновешена грузом массой М.
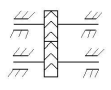
Схема балансировочного станка консольного типа

1 — пружина;
2 — индикатор;
3 — якорь;
4 — рама;
5 — опора станка;
6 — опора станины;
/, II— плоскости
Якорь 3 укладывают на опоры качающейся рамы 4. Рама одной точкой упирается на опору станка 5, а другой на пружину 1. При вращении якоря неуравновешенная масса любого его участка (кроме масс, лежащих в плоскости II — II) вызывает качание рамы. Амплитуда колебания рамы фиксируется индикатором 2. Чтобы уравновесить якорь в плоскости / — I, к его торцу со стороны коллектора (к нажимному конусу) прикрепляют поочередно различные по массе пробные грузы и добиваются прекращения колебания рамы или его уменьшения до допускаемой величины. Затем якорь переворачивают так, чтобы плоскость /— /проходила через неподвижную опору станины 6, и повторяют те же операции для плоскости II— II. В этом случае балансировочный груз прикрепляют к задней нажимной шайбе якоря.
19. Исследование движения машинного агрегата.
Под машинным агрегатом понимается совокупность механизмов двигателя, передаточных механизмов и механизмов рабочей машины. Механизм, лежащий в основе агрегата, представляет из себя систему с одной степенью свободы, поэтому можно следить за движением агрегата по движению какого-нибудь звена. Это звена называется главным или звеном приведения.
Степень неравномерности хода :
Будем выполнять расчет маховика для двигателя по методу Виттенбауэра. Мы должны построить графики зависимости избыточной работы от приведенного момента инерции.

Рассмотрим:
Кривошипно-ползунный механизм
Нагрузочный генератор
Сила, действующая на поршень механизма будет определяться:
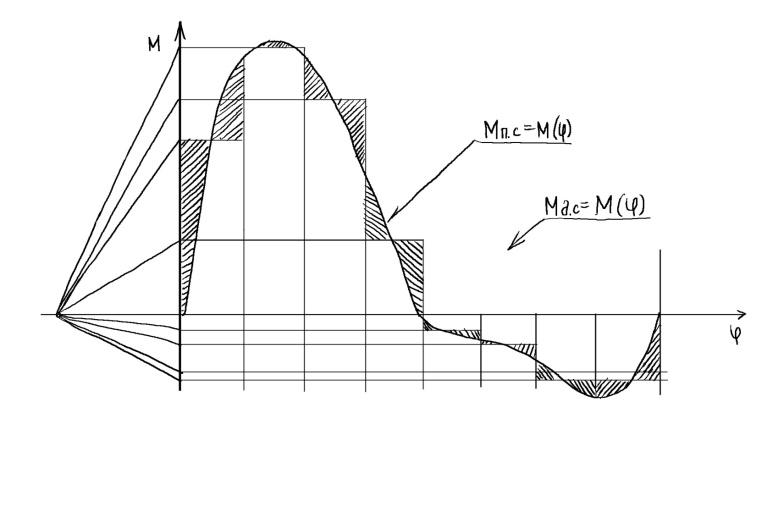
Построение графика зависимости момента силы, действующей на кривошип от угла поворота кривошипа.
1.
если P является движущей силой (двигатель)
если это сила полезного сопротивления (насос, компрессор)
2. Чтобы определить работу сил, действующих на поршень необходимо
выполнить интегрирование
Кривая
![]() Величины
масштабных коэффициентов:
Величины
масштабных коэффициентов:

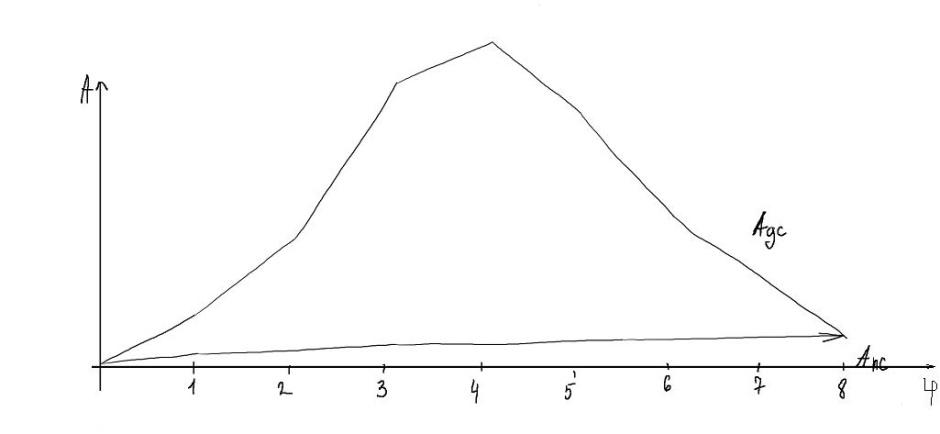
Диаграмма
работы
![]() приведенного
момента М и диаграмма
приведенного
момента М и диаграмма
работы
![]() момента
момента![]()
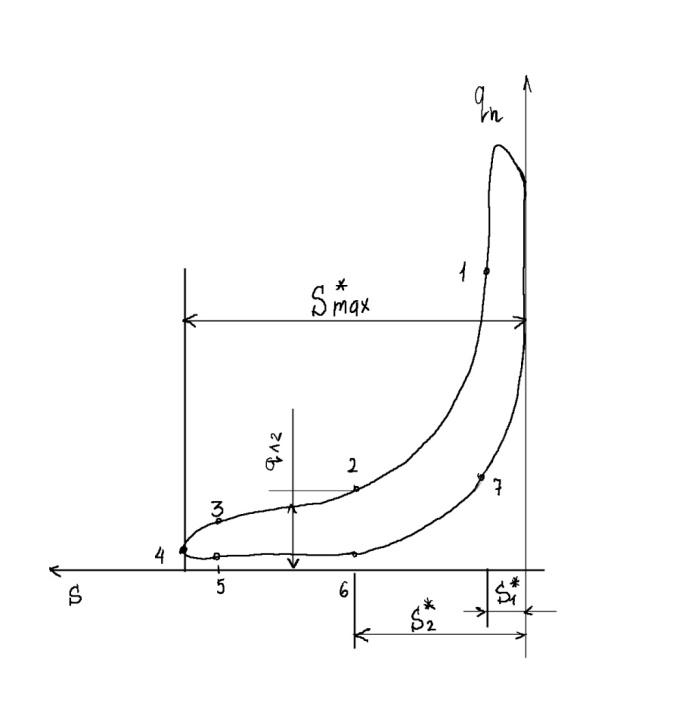
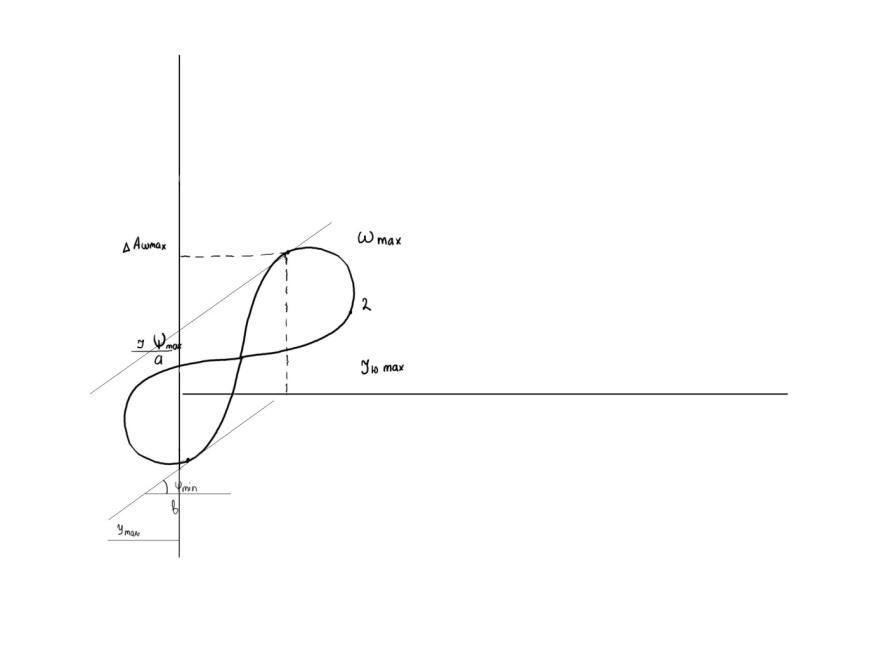
20. Диаграмма энергомасс(Виттенбауэра). Определение коэффициента неравномерности хода машины.
Построение диаграммы энерго масс
 Маховик
Маховик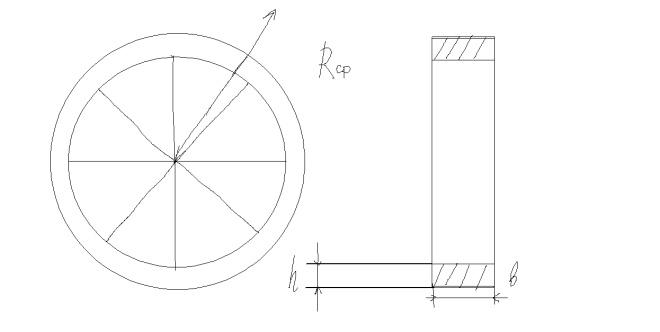
Проверка правильности выбора маховика.
 График
зависимости угловой скорости от угла
поворота
График
зависимости угловой скорости от угла
поворота
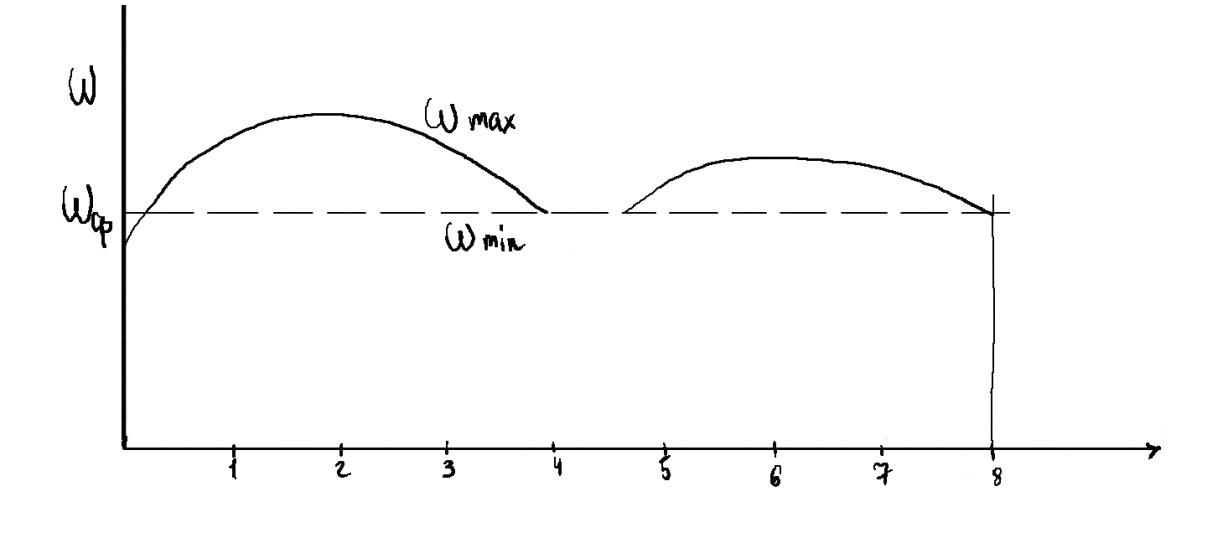
Проверку проводим:
Определяем % ошибку неравномерности хода
21. Классификация зубчатых передач
Классификация зубчатых механизмов происходит по расположению осей зубчатых передач в пространстве.
Типы:
1. Передачи с параллельными осями (цилиндрические зубчатые передачи)
2.Передачи с пересекающимися осями (конические передачи)
3. Передачи с перекрещивающимися осями (червячные передачи)
1. 2.
2. 3.
3.
1.Передачи с параллельными осями.
1.1 Прямозубые

1.2 Косозубые 1.3 Шевронные

1.4 Цевочные 1.5 Волновые


Прямозубые передачи:
Внешнее зацепление Внутреннее зацепление


Внешнее зацепление по профилю зуба:
Эвольвентный профиль

Круговой профиль
Профиль Новикова
Двухэвольвентный профиль
2.Передачи с пересекающимися осями.
2.1 Прямозубые 2.2 Косозубые 2.3 Спиральные



2.4 Винтовые

Классификация по профилю зуба:
2.1.1 Эвольвентный профиль
2.1.2 Круговой (циклоидальный) профиль
2.1.3 Неэвольвентный профиль
3.Передачи
с перекрещивающимися осями.
Червячное колесо
Червяк
Стойка
3.1 Эвольвентный профиль
3.2 Круговой профиль
3.3 Неэвольвентный профиль
Типы передач с перекрещивающимися осями:
Глобоидные

Спироидные передачи
Червячные передачи с цилиндрическим червяком

22. Основные кинематические характеристики зубчатой передачи
Передаточное отношение U определяется соотношением угловых скоростей (ω) или частот вращения (n) ведомого и ведущего колёс
U = ω1 / ω2 = n1 / n2.
Здесь и далее индексы 1 и 2 расставлены в порядке передачи механической энергии 1- ведущее (шестерня), 2- ведомое (колесо). Учитывая, что в зацепление входят колёса с одинаковым модулем (, можно задавшись числом зубьев шестерни Z1 найти число зубьев колеса
Z2 = U * Z1.
Передаточное число U ограничено габаритами зубчатой передачи.
Основные характеристики зубчатых передач
Расчетная окружная скорость м/с цилиндрической зубчатой передачи
Конической
передачи

где - угловая скорость зубчатого колеса,
n- частота вращения зубчатого колеса, мин-1
dw- начальный диаметр цилиндрического зубчатого колеса, м
dwm- начальный средний диаметр конического зубчатого колеса