

11. Классификация сил действующих на машину
Все силы, действующие в механизмах, условно подразделяются на:
внешние, действующие на исследуемую систему со стороны внешних систем и совершающие работу над системой. Эти силы в свою очередь подразделяются на:
движущие, работа которых положительна (увеличивает энергию системы);
сопротивления, работа которых отрицательна (уменьшает энергию системы). Силы сопротивления делятся на:
силы полезного (технологического) сопротивления - возникающие при выполнении механической системы ее основных функций (выполнение требуемой работы по изменению координат, формы или свойств изделия и т.п.);
силы трения (диссипативные) - возникающие в месте связи в КП и определяемые условиями физико-механического взаимодействия между звеньями (работа всегда отрицательна);
взаимодействия с потенциальными полями (позиционные) - возникают при размещении объекта в потенциальном поле, величина зависит от потенциала точки, в которой размещается тело (работа при перемещении из точки с низким потенциалом в точку с более высоким - положительна; за цикл, т.е. при возврате в исходное положение, работа равна нулю). Потенциальное поле - силы тяжести или веса. Существуют электромагнитные, электростатические и другие поля.
внутренние, действующие между звеньями механической системы. Работа этих сил не изменяет энергии системы. В механических системах эти силы называются реакциями в КП.
расчетные (теоретические) - силы, которые не существуют в реальности, а только используются в различных расчетах с целью их упрощения:
силы инерции - предложены Д'Аламбером для силового расчета подвижных механических систем. При добавлении этих сил к внешним силам, действующим на систему, устанавливается квазистатическое равновесие системы и ее можно рассчитывать, используя уравнения статики (метод кинетостатики).
приведенные (обобщенные) силы - силы. совершающие работу по обобщенной координате равную работе соответствующей реальной силы на эквивалентном перемещении точки ее приложения.
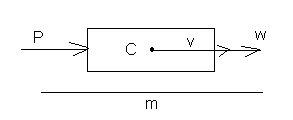
12. Уравнение движения машин
![]()
E = mV^2 / 2 - при поступательном движении
E = Yω^2 / 2 - при вращательном движении
dE = dAдс – dAпс ± dAвеса – dAтр
дифференциальное уравнение движения машин
η = Aпс/Адс, 0 ≤ η < 1
13. Характерные виды движения машин

Рассмотрим средний участок
Установившееся равновесное движение


-
коэффициент неравномерности хода машины
Виды движения
Поступательное прямолинейное

Вращательное


Сложноплоское движение

27. Замещение масс звеньев



m2 (x2, y2)



m1 (x1, y1)
m3 (x3, y3)
m4 (x4, y4)
В общем случае положение отдельных точек и масс звеньев может быть не определено.
∑mi = m, т.е. m1 + m2 + m3 +… = m
∑mixi = 0, т.е. m1x1 + m2x2 + m3x3 +… = 0
∑miyi = 0, т.е. m1y1 + m2y2 + m3y3 +… = 0
∑miri² = J, т.е. m1r1² + m2r2² + m3r3² +… = J
Где ri – расстояние от оси вращения до центра тяжести
При использовании метода замещающих масс звено механизма с распределенной массой заменяется расчетной моделью, которая состоит из точечных масс. Точки приведения масс можно выбирать произвольно, но обычно замещающие массы располагают в шарнирах: звено с распределенной массой; модель с замещающими массами.