

16. Установка основного и избыточного противовеса
КРИВОШИПНО-ПОЛЗУННЫЙ МЕХАНИЗМ - кривошипный механизм, в состав которого входит ползун - звено, образующее со стойкой (неподвижным звеном) поступательную кинематическую пару. Кривошипно-ползунный механизм преобразует вращательное движение в прямолинейно-поступательное или наоборот.
При движении и вращении деталей кривошипно-ползунного механизма возникают инерционные силы поступательно движущихся масс и центробежные силы вращающихся масс.
Уравновешивание двигателя заключается в создании такой системы сил при установившемся режиме работы, в которой равнодействующие сил и моментов были бы постоянны по значению и направлению или равны нулю.
На практике наиболее часто статическое уравновешивание проводят :
1)Выбирая симметричные схемы механизма
2)Устанавливая на звеньях механизма дополнительные движущие массы - противовесы
Схема сил инерции кривошипно-ползунного механизма без противовеса
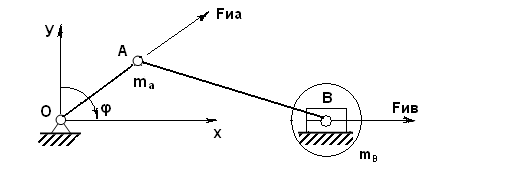
FИА – сила инерции в точке А
FИВ – сила инерции в точке В
Fиo =Fиа+Fив
Спроецируем силы инерции на ось ОХ
FИОX=FИА*cosφ+FИВ=
ma*ω12*r*cosφ+mb* ω12*r*cosφ+mb* ω12*r*λ*cos2φ
Спроецируем силы инерции на ось ОУ
FИОУ=FИА*sinφ=ma*ω12*r*sinφ
FИО=√(FИОX)2 + (FИОУ)2
Схема сил инерции механизма с противовесом
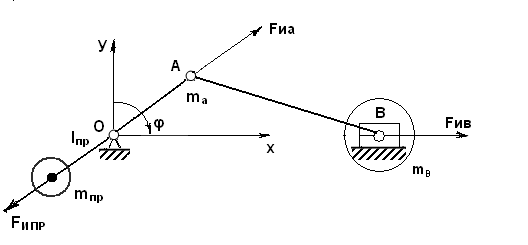
FИ ПР – сила инерции противовеса
FИОX пр=FИА*cosφ+FИВ - FИ ПР*cosφ= ma*ω12*r*cosφ+
+ mb* ω12*r*cosφ+ mb* ω12*r*λ*cos2φ- mпр*Lпр*ω12*cosφ
Годограф сил инерции

При φ=0 и при φ =180˚ значения будут max
Механизм воздействует на стойку в т. О с силой, переменной по величине и направлению
При уравновешивании сил инерции ставится задача уменьшить равнодействующую сил инерции, действующую на стойку.
Самым простым и экономичным способом является установка противовеса, центр масс которого расположен на продолжении кривошипа, за точкой О. Он вращается вместе с кривошипом.
Обычно устанавливают два типа противовесов – основной и избыточный
Установка основного противовеса
ma*r=mпр*Lпр →mпр=ma*r ∕ Lпр
FИОХ ПР= mb* ω12*r*cosφ+mb* ω12*r*λ*cos2φ
FИО У=0
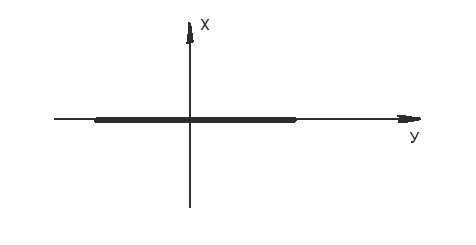
Годограф сил инерции превратится в линию
Установка избыточного противовеса
(ma+k*mb)*r=mпр*Lпр
FИО Х=mb* ω12*r*λ*cos2φ
FИО У=-mb*ω12*r*sinφ
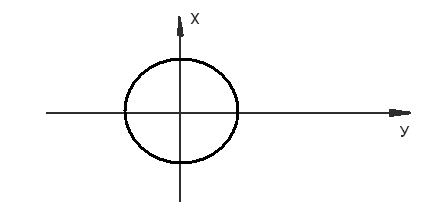
Оптимальный годограф получается близким к окружности
17. Уравновешивание вращающихся деталей
Все вращающиеся детали делятся на 2 вида:
1)Расстояние вдоль оси вращения много меньше радиуса вращения детали(диск, маховик, колесо)
2)Расстояние вдоль оси вращения соизмеримо с диаметром(ротор, турбина, колесо гоночного автомобиля Формула 1)
Балансировка вращающихся тел — процесс уравновешивания вращающихся частей машины —роторов электродвигателей и турбин, коленчатых валов, шкивов, колёс автомобиля и др. Балансировка выполняется как при помощи балансировочных станков, так и непосредственно во время эксплуатации.
Балансировка включает в себя определение значений и углов дисбаланса и изменение их корректировкой масс.
Несовпадение оси вращения ротора с главной центральной осью инерции приводит к появлению нескомпенсированных центробежных сил и моментов.
Несбалансированная деталь вызывает вибрацию машины, приводит к износу и уменьшению срока службы. Балансировка уменьшает вибрацию и шум, увеличивает срок службы машины.
Различают статическую и динамическую балансировку.
Схема статического уравновешивания деталей

m1 — масса неуравновешенной детали; m2 — масса уравновешивающего груза; г1, г2 — их расстояния от оси вращения
Статической балансировке подвергают плоские детали, имеющие небольшое отношение длины к диаметру: зубчатое колесо тягового редуктора, крыльчатку вентилятора холодильника и т.п. Статическая балансировка ведется на горизонтально-параллельных призмах, цилиндрических стержнях или на роликовых опорах. Поверхности призм, стержней и роликов должны быть тщательно обработаны. Точность статической балансировки во многом зависит от состояния поверхностей этих деталей.