

14. Замещение масс звеньев
В общем случае положение отдельных точек и масс звеньев может быть не определено.
Т.к. все 4 уравнения независимые, то число неизвестных в них должно быть равно 4.
Если это условие не выполняется, то говорят о приближеном замещении масс.


При приближённом замещении масс 3-е уравнение не учитывается. Ошибку легко сосчитать, и на 1-ом этапе расчётов нас вполне устроит приближённое замещение масс.


15. Уравновешивание механизмов
Целью уравновешивания механизмов является устранение переменных во времени и пространстве воздействий стойки, станины механизма на опору, фундамент, вызывающих колебания фундамента и здания, а также уменьшение вибрации.
Условия уравновешенности механизма
Условия уравновешенности механизмов в общем виде можно охарактеризовать уравнениями
![]() ,
,
![]() ,
,
где ![]() и
и![]() –
главный вектор сил и главный момент
сил давления станины механизма на
фундамент, опору;
–
главный вектор сил и главный момент
сил давления станины механизма на
фундамент, опору;![]() и
и![]() –
главный вектор сил и главный момент
всех других сил, внешних по отношению
к механизму;
–
главный вектор сил и главный момент
всех других сил, внешних по отношению
к механизму;![]() и
и![]() –
главный вектор сил инерции и главный
момент сил инерции звеньев механизма.
–
главный вектор сил инерции и главный
момент сил инерции звеньев механизма.
С достаточной для практики точностью часто ограничиваются условиями
![]() , (11)
, (11)
![]() .
.
Этого можно достичь установкой противовесов на подвижных звеньях, рациональным размещением центров масс звеньев механизма при его проектировании.
Статическое уравновешивание плоского механизма с помощью противовесов
Часто
ограничиваются лишь статическим
уравновешиванием механизма и его
звеньев, т.е. выполнением условия (11) ![]() .
Это условие соответствует постоянству
положения центров масс звеньев
относительно стойки (т.е. центр их масс
должен быть неподвижен). Так как
.
Это условие соответствует постоянству
положения центров масс звеньев
относительно стойки (т.е. центр их масс
должен быть неподвижен). Так как![]() ,
,![]() ,
то необходимо обеспечить условие
,
то необходимо обеспечить условие![]() ,
т.е. ускорение центра тяжести должно
отсутствовать.
,
т.е. ускорение центра тяжести должно
отсутствовать.
Рассмотрим последовательность статического уравновешивания на примере четырёхшарнирного механизма (рис. 6.4, а). Заменяем массы звеньев 1, 2, 3 сосредоточенными массами в точках A, B, C, D, причём в силу неподвижности точек A и D, массы, сосредоточенные в этих точках, можно не учитывать.

Рис. 6.4
Приведённые массы в точках В и С равны:
![]() ;
;
![]() .
.
Так
как заменяющие массы ![]() и
и![]() совершают
вращательное движение, то для
уравновешивания сил инерции необходимы
противовесы с массами
совершают
вращательное движение, то для
уравновешивания сил инерции необходимы
противовесы с массами![]() и
и![]() ,
определяемыми из условий (рис. 6.4,б):
,
определяемыми из условий (рис. 6.4,б):
![]() ;
; ![]() ,
,
где, задавая длины противовесов, можно получить их массы и наоборот.
Рассмотрим
моментное уравновешивание на
примере четырёхшарнирного механизма.
Его приближённое моментное уравновешивание
можно осуществить после статического
уравновешивания, введя в схему механизма
два одинаковых дополнительных
противовеса ![]() (рис.
6.5), соединённых с зубчатыми колёсами
“a”
и “b”. Колесо
“a”
жёстко связано с кривошипом 1 и вращается
с угловой скоростью
(рис.
6.5), соединённых с зубчатыми колёсами
“a”
и “b”. Колесо
“a”
жёстко связано с кривошипом 1 и вращается
с угловой скоростью ![]() ,
а равное ему колесо “b”
вращается с той же угловой скоростью
,
а равное ему колесо “b”
вращается с той же угловой скоростью ![]() ,
но угловые координаты противовесов
отличаются на 1800,
поэтому момент пары сил инерции от
противовесов
,
но угловые координаты противовесов
отличаются на 1800,
поэтому момент пары сил инерции от
противовесов ![]() равен
равен![]() .
Подбирая положение точкиE,
можно обеспечить направление
.
Подбирая положение точкиE,
можно обеспечить направление ![]() ,
противоположное направлению
,
противоположное направлению![]() ,
а массу противовесов
,
а массу противовесов![]() определяют
из условия
определяют
из условия![]() .
.
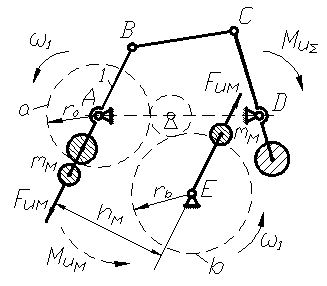
Рис.6.5