

7. Аналитическая кинематика кривошипно-ползунного механизма
 1
– стойка
1
– стойка
2 – кривошип
3 – шатун
4 – поршень / ползун
r – длина кривошипа
L – длина шатуна
φ – угол поворота
dφ / dt = ω – угловая скорость
(r / L = λ) << 1 - отношение радиуса кривошипа к длине шатуна
Найти: SB , VB , WB
SB = OB0 –OB = r + L – OK – KB
∆ OAK
OK = r * cos φ
∆ ABK
KB = L * cos β
AK = r * sin φ
AK = L * sin β
r * sin φ = L * sin β
sin β = (r / L ) * sin φ
cos β = ( 1 – sin2 β ) ^ ½ = ( 1 – λ2 * sin2 φ ) ^ ½
cos β ≈ 1 – (λ2 / 2) * sin2 φ
SB = r + L – r * cos φ – L + L * (λ2 / 2) * sin2 φ = r * ( 1 - cos φ + (λ / 4) *
( 1 - cos 2φ))
VB = dS / dt = dSBdφ / dφdt = ( dSB / dφ ) * ω = r * ω * (sin φ + (λ / 2) * sin 2 φ )
WB = r*ω2 (cos φ + λ * cos 2φ )
8. Экспериментальны метод исследования механизмов с помощью датчиков
При экспериментальном методе исследования механизмов кинематические характеристики точек и звеньев механизма регистрируются с помощью датчиков. Датчики регистрируют, а потом и преобразуют кинематические параметры в пропорциональные электрические сигналы, которые после усиления регистрируются различными приборами. В последние годы для регистрации и обработки результатов экспериментальных исследований широко используются ПЭВМ. На рис. показана экспериментальная установка для исследования кинематических характеристик кривошипно-кулисного механизма пресс-автомата.
В этой экспериментальной установке используются для
измерений:
перемещения выходного звена — потенциометрический датчик перемещения, в котором пропорционально положению движка потенциометра изменяется его сопротивление;
скорости выходного звена — индукционный датчик скорости, в котором напряжение на концах катушки движущейся в поле постоянного магнита пропорционально скорости катушки;
ускорения выходного звена — тензометрическиий акселерометр. Он состоит из пластинчатой пружины, один конец которой закреплен на выходном звене механизма, а на втором закреплена масса. На пластину наклеены проволочные тензопреобразователи. При движении выходного звена с ускорением инерционность массы вызывает изгиб пластины, деформацию тензопреобразователей и изменение их сопротивления, пропорциональное ускорению выходного звена.
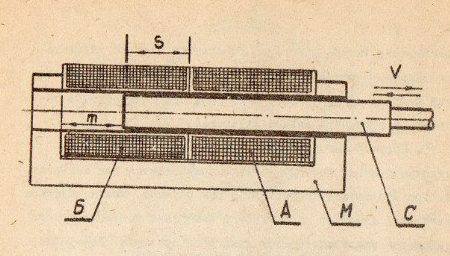 А
– первичная обмотка
А
– первичная обмотка
Б – вторичная обмотка
М – магнитопровод
С – часть М, связывающая А и Б обмотки
9. Преобразование механизма методом замены стойки
Характер абсолютных движений звеньев зависит от того, какое из звеньев кинематической цепи является стойкой.
Относительное движение звеньев не зависит от выбора стойки, поскольку определяется характером подвижной связи кинематической пары.
10. Условия проворачиваемости кривошипа в шарнирном четырёхзвеннике
При
проектировании (синтезе) четырёхшарнирного механизма
одним из учитываемых условий может
быть проворачиваемость звеньев,
то есть наличие одного или двух кривошипов.
Это зависит от соотношения длин звеньев.
Например, для того, чтобы
звено АВ четырёхзвенника (рис.
8.1) могло стать кривошипом, оно должно
последовательно пройти через два крайних
положения. Используя три положения
механизма, получим следующие условия:
для положений 1, 2, 3, предварительно
обозначив длины звеньев: ![]()
При этом:
![]()
![]()
![]()
то есть сумма длин кривошипа и любого другого звена меньше суммы остальных звеньев.
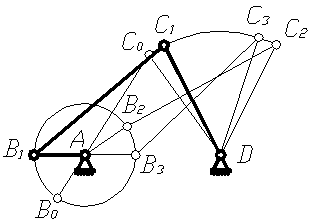
Рис.8.1
Сложим
попарно полученные неравенства и
получим: ![]()
![]()
![]() ,
то есть кривошип является самым коротким
звеном. А если данные условия не
выполняются, то механизм будет
либо двухкривошипным,
либодвухкоромысловым.
Эти условия используются при геометрическом
синтезе.
,
то есть кривошип является самым коротким
звеном. А если данные условия не
выполняются, то механизм будет
либо двухкривошипным,
либодвухкоромысловым.
Эти условия используются при геометрическом
синтезе.