

В.А. Синицын
.pdf6 |
1.1. Основные понятия |
МИНИСТЕРСТВО ОБРАЗОВАНИЯ РОССИЙСКОЙ ФЕДЕРАЦИИ
ФГБОУ ВПО АЛТАЙСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ
им. И.И.ПОЛЗУНОВА
В.А.СИНИЦЫН
ДИНАМИЧЕСКАЯ УРАВНОВЕШЕННОСТЬ ДВИГАТЕЛЕЙ ВНУТРЕННЕГО СГОРАНИЯ
Учебное пособие
(МОДУЛЬНЫЙ КУРС)
БАРНАУЛ 2014
2 |
1.1. Основные понятия |
УДК 621.436.013
Синицын В.А. Динамическая уравновешенность двигателей внутреннего сгорания. Учебное пособие (Модульный курс) / Алт. гос. техн. ун-т им. И.И.Ползунова. – Барнаул: Изд-
во АлтГТУ, 2014. – 108 с. ISBN
Настоящее учебное пособие, реализующее модульный принцип обучения, подготовлено в рамках реализации проекта по аналитической ведомственной программе «Развитие научного потенциала высшей школы (2009 – 2010 годы)» по заданию Федерального агентства по образованию по договору № 9H-09 от 1.01.2009 г. и предназначено для самостоятельной работы студентов с целью приобретения практических навыков в решении различных задач по уравновешиванию двигателей внутреннего сгорания любых компоновочных схем.
В учебном пособии основное внимание уделено вопросам общей методологии решения и подробному анализу динамических свойств двигателей и конкретных практических задач по уравновешиванию ДВС. Проанализированы различные критерии неуравновешенности ДВС, приведены реальные механизмы уравновешивания двигателей.
Материал учебного пособия состоит из нескольких законченных частей (модулей), имеющих самостоятельное значение и максимальную индивидуализацию продвижения в обучении студента.
Рецензенты: Кукис В.С., д.т.н., профессор каф. ДВС ЧВВАИУ;
Дурыманов Б.А., к.т.н., ведущий конструктор ОАО «Барнаултрансмаш»

МОДУЛЬ 1. ОСНОВЫ ВЕКТОРНОГО АНАЛИЗА УРАВНОВЕШЕННОСТИ ДВС |
3 |
ОГЛАВЛЕНИЕ |
|
ОГЛАВЛЕНИЕ................................................................................................................................. |
3 |
МОДУЛЬ 1. ОСНОВЫ ВЕКТОРНОГО АНАЛИЗА УРАВНОВЕШЕННОСТИ ДВС ........ |
5 |
1.1. Основные понятия ........................................................................................................... |
5 |
1.2. Динамически эквивалентная модель однорядного одновального двигателя............. |
9 |
1.3. Динамически эквивалентные модели плоских отсеков ............................................. |
14 |
1.3.1 Отсек 2Vγ.................................................................................................... |
15 |
1.3.2 Отсек 3 .................................................................................................... |
25 |
1.4. Динамические свойства плоских отсеков ................................................................... |
26 |
1.4.1 Двухцилиндровые отсеки .......................................................................... |
26 |
1.4.2 Трехцилиндровые отсеки........................................................................... |
30 |
МОДУЛЬ 2. ПРАКТИЧЕСКИЕ ЗАДАЧИ УРАВНОВЕШЕННОСТИ (ОДНОВАЛЬНЫЕ |
|
ДВИГАТЕЛИ)................................................................................................................................. |
31 |
2.1. Последовательность анализа уравновешенности ....................................................... |
31 |
2.2. Однорядные двигатели ................................................................................................. |
33 |
2.2.1. Одноцилиндровый одновальный двигатель ........................................... |
33 |
2.2.2. Одноцилиндровый двухвальный двигатель............................................ |
33 |
2.2.3. Двухцилиндровый одновальный двигатель ............................................ |
35 |
2.2.3.1 Двухцилиндровый одновальный двигатель с кривошипами |
|
коленчатого вала, направленными в одну сторону ......................... |
35 |
2.2.3.2 Двухцилиндровый одновальный двигатель с кривошипами |
|
коленчатого вала, направленными под углом 180 о ........................ |
35 |
2.2.4. Трехцилиндровый одновальный двигатель............................................. |
37 |
2.2.5. Четырехцилиндровый четырехтактный двигатель ................................ |
41 |
2.2.6. Одновальный четырехтактный пятицилиндровый двигатель............... |
45 |
2.2.7. Одновальный четырехтактный шестицилиндровый двигатель ............ |
47 |
2.2.8. Одновальный двухтактный шестицилиндровый двигатель с клапанно - |
|
щелевой продувкой ............................................................................................. |
49 |
2.2.9. Одновальный двухтактный шестицилиндровый двигатель с петлевой |
|
продувкой ............................................................................................................. |
53 |
2.2.10. Одновальный двухтактный семицилиндровый двигатель .................. |
55 |
2.2.11. Одновальный четырехтактный 8-цилиндровый двигатель ................. |
58 |
2.2.12. Одновальный двухтактный 8-цилиндровый двигатель ....................... |
60 |
4 1.1. Основные понятия
МОДУЛЬ 3. ПРАКТИЧЕСКИЕ ЗАДАЧИ УРАВНОВЕШЕННОСТИ (ДВУХРЯДНЫЕ
ДВИГАТЕЛИ)................................................................................................................................. |
67 |
2.3. Двухрядные двигатели ............................................................................................... |
67 |
2.3.1. Транспортный двигатель 4V90 ............................................................... |
67 |
2.3.2. Транспортный двигатель 4V120 ............................................................. |
70 |
2.3.3. Транспортный двигатель 4V180 ............................................................. |
72 |
2.3.4. Транспортный двигатель 6V120 ............................................................. |
73 |
2.3.5. Транспортный двигатель 6V90 ............................................................... |
77 |
2.3.6. Транспортный двигатель 6V180 ............................................................ |
77 |
2.3.7.Четырехтактный двигатель 8V60 с равномерной продольно-
с равномерной продольно-
симметричной схемой вала................................................................................. |
81 |
2.3.8. Двигатель 8V90 с крестообразным коленчатым валом ........................ |
83 |
2.3.9. Двухтактный двигатель 8V90 ................................................................. |
84 |
2.3.10. Транспортные двигатели 8V45 ............................................................. |
86 |
2.3.11. Транспортный двигатель 8V120 ........................................................... |
87 |
2.3.12. Транспортный двигатель 8─ О ─180 ...................................................... |
87 |
2.3.13. Оптимизационная задача уравновешенности транспортного двигате- |
|
ля 10V .................................................................................................................. |
90 |
2.3.14. Транспортный двигатель 10V120 ......................................................... |
91 |
МОДУЛЬ 4. КРИТЕРИИ НЕУРАВНОВЕШЕННОСТИ И МЕХАНИЗМЫ УРАВНО-
ВЕШИВАНИЯ ДВС |
.......................................................................................................................93 |
ЛИТЕРАТУРА ............................................................................................................................... |
100 |
КОНТРОЛЬНЫЕ ТЕСТЫ………………………………………………………………………..102
МОДУЛЬ 1. ОСНОВЫ ВЕКТОРНОГО АНАЛИЗА УРАВНОВЕШЕННОСТИ ДВС |
5 |
МОДУЛЬ 1. ОСНОВЫ ВЕКТОРНОГО АНАЛИЗА УРАВНОВЕШЕННОСТИ ДВС
1.1. Основные понятия
На установившемся режиме работы в двигателе действуют периодически изменяю-
щиеся по величине и направлению силы инерции поступательно движущихся масс (ПДМ),
неуравновешенных вращающихся масс (НВМ), продольные моменты от этих сил, а также поперечный опрокидывающий реактивный момент, равный по величине, но обратный по знаку выходному крутящему моменту двигателя. В каждый момент времени все эти силы и моменты складываются и передаются на опоры двигателя.
Если на опоры двигателя не передается никаких сил и моментов, или передаются постоянные по величине и направлению силы и моменты, то двигатель считается пол-
ностью уравновешенным.
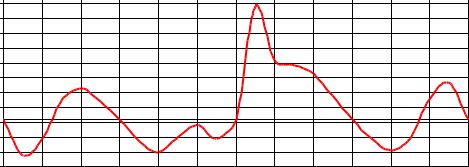
Это так называемая внешняя уравновешенность. Практически полной внешней урав-
новешенности работающего двигателя достичь невозможно, т.к. вследствие цикличности рабочего процесса выходной крутящий момент и соответствующий ему реактивный момент всегда периодически изменяются в течение рабочего цикла (рис. 1.1).
Мк, Нм |
|
|
|
|
|
|
|
|
|
|
|
|
|
1950 |
|
|
|
|
|
|
|
|
|
|
|
|
|
1700 |
|
|
|
|
|
|
|
|
|
|
|
|
|
1450 |
|
|
|
|
|
|
|
|
|
|
|
|
|
1200 |
|
|
|
|
|
|
|
|
|
|
|
|
|
950 |
|
|
|
|
|
|
|
|
|
|
|
|
|
700 |
|
|
|
|
|
|
|
|
|
|
|
|
|
450 |
|
|
|
|
|
|
|
|
|
|
|
|
|
200 |
|
|
|
|
|
|
|
|
|
|
|
|
|
-50 |
|
|
|
|
|
|
|
|
|
|
|
|
|
-300 |
0 |
60 |
120 |
180 |
240 |
300 |
360 |
420 |
480 |
540 |
600 |
660 |
720 |
|
|
|
|
|
|
|
|
|
|
|
|
φ, опкв |
|
-550 |
|
|
|
|
|
|
|
|
|
|
|
|
|
-800 |
|
|
|
|
|
|
|
|
|
|
|
|
|
Рисунок 1.1 – График крутящего момента 1-цилиндрового ДВС |
|
|
|
||||||||||
Остаточную внешнюю неуравновешенность двигателя можно уменьшить за счет ме-
роприятий, направленных на повышение равномерности выходного крутящего момента: пе-
рехода на 2-тактный цикл, увеличения числа цилиндров, увеличения массы маховика, со-
блюдения равенства интервалов между вспышками по двигателю и т.д.
6 |
1.1. Основные понятия |
Коротко рассмотрим мероприятия, способствующие снижению низкочастотных виб-
раций двигателя, связанных с неравномерностью выходного крутящего момента.
1) Изменение диаграммы рабочего процесса
Существенное влияние на амплитуды гармоник крутящего момента оказывает харак-
тер индикаторной диаграммы. Более плавное протекание рабочего процесса (применение двухфазного впрыска, полуразделенных камер сгорания) позволяет снизить вибрации, свя-
занные с неравномерностью крутящего момента, на 3 – 5 дБ.
2) Применение коленчатых валов со смещенными в пределах одной секции шатун-
ными шейками
Результирующие силы инерции и продольные моменты от этих сил вследствие цик-
личности работы двигателя также не могут быть постоянными во времени. Следовательно,
для полной динамической уравновешенности двигателя необходимо, чтобы эти силы и мо-
менты были равны нулю. Тогда, без учета остаточной неуравновешенности двигателя вслед-
ствие изменения крутящего момента, основные условия полной внешней динамической уравновешенности можно записать в следующем виде:
PR |
0; |
M R |
0; |
|
PI |
0; |
M I |
0; |
(1.1) |
PII |
0; |
M II |
0. |
|
В зависимости от типа двигателя, его назначения и требований технического задания на проектирование двигатель может быть полностью уравновешен по всем шести признакам или частично, по некоторым из них. Если все или некоторые из признаков (1.1) выполняются без введения дополнительных мер по уравновешиванию, то говорят, что двигатель полно-
стью или частично самоуравновешен. Уравновешивание двигателя по каждому из шести признаков осуществляется искусственными способами с помощью различных уравновеши-
вающих механизмов. Для построения одних уравновешивающих механизмов можно исполь-
зовать коленчатый вал или кулачковый вал механизма газораспределения, не усложняя су-
щественно конструкцию двигателя; для построения других требуется введение дополнитель-
ных устройств, усложняющих конструкцию двигателя.
Основное влияние на степень динамической самоуравновешенности двигателя оказы-
вают: число цилиндров в блоке, число и расположение блоков (схема компоновки), схема расположения кривошипов коленчатого вала (схема заклинки) и взаимное сочетание этих факторов. При определении принципиальной схемы двигателя необходимо использовать та-
кое сочетание этих факторов, которое обеспечивало бы: максимальную равномерность вы-
МОДУЛЬ 1. ОСНОВЫ ВЕКТОРНОГО АНАЛИЗА УРАВНОВЕШЕННОСТИ ДВС |
7 |
ходного крутящего момента, оптимальное, с точки зрения нагрузки коренных подшипников,
разнесение вспышек по двигателю, полную динамическую самоуравновешенность или оста-
точную несамоуравновешенность по тем признакам, которые можно легко уравновесить наиболее простыми конструктивными способами.
Но может случиться так, что благоприятная по самоуравновешенности схема компо-
новки не отвечает другим, более вашим требованиям, например, по плотности компоновки,
по жёстким весогабаритным ограничениям и др. В таких случаях выбирается схема компо-
новки, обеспечивающая первоочередные, главные требования, а для уравновешивания двига-
теля применяют специальные уравновешивающие механизмы, даже если они усложняют конструкцию. Задача уравновешивания неуравновешенных сил инерции заключается в ис-
кусственном создании уравновешивающей силы, которая должна иметь общую с неуравно-
вешенной силой линию действия, должна быть равна ей по величине и направлена в проти-
воположную сторону.
Наиболее просто уравновешиваются центробежные силы инерции - установкой проти-
вовесов на щеках колончатого вала, при этом коренные подшипники разгружаются от дейст-
вия этих сил. Для уравновешивания сил инерции ПДM первого порядка в общем случае тре-
буется специальный двухвальный уравновешивающий механизм, в котором валы располо-
жены параллельно продольной оси коленчатого вала, вращаются с одинаковой угловой ско-
ростью ω в противоположных направлениях. В аналогичном уравновешивающем механизме сил инерции ПДМ второго порядка валы должны вращаться с удвоенной угловой скоростью.
При уравновешивании продольных моментов от сил инерции необходимо искусственно соз-
дать уравновешивающий момент, равный уравновешиваемому по величине, противоположно направленный и действующий в той же плоскости.
Продольный момент от центробежных сил также уравновешивается наиболее просто -
выносными противовесами на концах коленчатого вала, или созданием дисбаланса в массив-
ных деталях на его концах, для уравновешивания продольных моментов от сил инерции ПДМ требуются специальные уравновешивающие механизмы первого и второго порядков.
Различные практические способы уравновешивания будут рассмотрены дальше на конкрет-
ных примерах.
В настоящее время применение вычислительной техники позволяет аналитически ре-
шать любые задачи уравновешенности с учётом большого числа факторов. Но для того, что-
бы свободно обращаться с ЭВМ и тем более чтобы создавать новое программно-
математическое обеспечение задач уравновешенности, необходимы глубокие знания и прак-
тические навыки анализа в рассматриваемой области. Эти необходимые качества инженера-
8 |
1.1. Основные понятия |
конструктора позволяет приобрести векторный графоаналитический метод анализа, обла-
дающий достаточной простотой и большой наглядностью.
Векторный метод анализа уравновешенности основан на понятии динамически экви-
валентной модели двигателя (ДЭМ), которая строится из соответствующих моделей про-
дольных и поперечных модулей, составляющих двигатель. При построении динамически эквивалентных моделей принимаются следующие упрощающие допущения:
- все кривошипно-шатунные механизмы центральные, с одинаковыми значениями R
и L;
- поступательно движущиеся и вращающиеся массы всех кривошипно-шатунных механизмов одинаковы (на практике это условие достигается специальной подгонкой по мас-
се всех поршневых и шатунных комплектов к балансировкой коленчатого вала);
- оси всех цилиндров плоского отсека лежат в ОДНОЙ , проходящей через центр ша-
тунной шейки перпендикулярно продольной оси коленчатого вала;
-расстояние между осями соседних цилиндров в блоке и между центрами соседних коренных шеек одинаковы и равны постоянному шагу lo ;
-влиянием зазоров в подвижных соединениях КШМ и деформацией деталей КШМ и корпуса двигателя пренебрегаем.
В общем случае многоблочный многовальный двигатель рассматривается как сложная композиция, состоящая из совершенно одинаковых модульных двигателей. Продольные мо-
дули образуются продольным разбиением исходного двигателя на одинаковые одноблочные одновальные двигатели, число которых равно числу блоков исходного двигателя, иногда ис-
пользуют более сложные модули, число которых равно числу коленчатых валов исходного двигателя. Поперечные модули образуются поперечным разбиением исходного двигателя на одинаковые плоские отсеки, число которых равно числу цилиндров в блоке (или числу ша-
тунных шеек коленчатого вала).
В первую очередь выполняется анализ уравновешенности по всем признакам одно-
блочного двигателя. Если окажется, что одноблочный двигатель самоуравновешен по неко-
торым признакам, то делается вывод о самоуравновешенности по этим же признакам и ис-
ходного многоблочного двигателя. Затем выполняется анализ по оставшимся неуравнове-
шенным признакам плоского отсека и исходного двигателя, который рассматривается как сочетание плоских отсеков. По результатам анализа разрабатываются наиболее простые спо-
собы уравновешивания или принимается решение оставить двигатель неуравновешенным,
предусмотрев соответствующие меры для погашения вибраций.
Использование накопленных данных об уравновешенности одноблочных двигателей разной тактности, с разным числом цилиндров и с разными схемами коленчатого вала, а так-
МОДУЛЬ 1. ОСНОВЫ ВЕКТОРНОГО АНАЛИЗА УРАВНОВЕШЕННОСТИ ДВС |
9 |
же различных плоских отсеков, позволяет значительно упростить решение задач уравнове-
шенности двигателей с любыми компоновочными схемами, поместив эти данные в компью-
терную память, можно автоматизировать поиск оптимальных решений.
При анализе уравновешенности двигателей обычно рассматривается два типа задач -
прямая и обратная.
Прямая задача (анализ). Заданы схема компоновки двигателя и схема коленчатого вала. Требуется выполнить анализ уравновешенности и разработать наиболее простые спосо-
бы уравновешивания.
Обратная задача (синтез). Заданы требуемые динамические свойства двигателя, т.е.
полная или частичная самоуравновешенность. Требуется определить схему компоновки и схему коленчатого вала, обеспечивающие заданную степень самоуравновешенности. При неоднозначности решения необходимо найти оптимальный вариант, проведя сравнительный анализ всех возможных вариантов по всей совокупности определяющих факторов: плотности компоновки и габаритных ограничений, общей технологичности двигателя и технологично-
сти коленчатого вала, равномерности выходного крутящего момента, степени нагружения коренных подшипников коленчатого вала, возможности объединения выпуска групп цилин-
дров при импульсном наддуве.
В практике конструирования могут встретиться различные варианты постановки пря-
мой и обратной задачи уравновешенности, а также различные комбинации этих задач. Реше-
ние задачи векторным методом в любой её постановке основывается на рассмотрении дина-
мически эквивалентных моделей одноблочных двигателей и плоских отсеков, из которых составляется динамически эквивалентная модель двигателя сложной компоновочной схемы.
1.2. Динамически эквивалентная модель однорядного одновального двигателя
Исходный двигатель можно рассматривать как композицию одинаковых одноцилинд-
ровых плоских отсеков. Следовательно, динамически эквивалентная модель (ДЭМ) такого двигателя представляет собой совокупность моделей всех плоских отсеков.
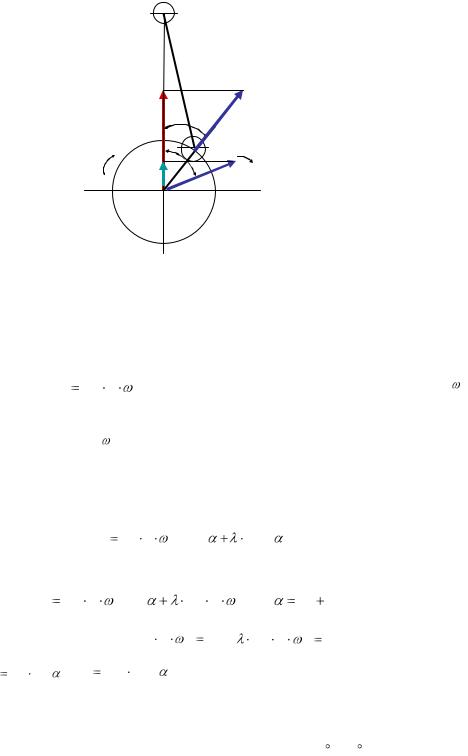
ДЭМ одноцилиндрового плоского отсека состоит из приведённых сосредоточенных масс поступательно движущихся – mS и вращающихся - mR деталей КШМ и системы векто-
ров сил инерции, возникающих при движении этих масс (рис. 1.2).
10 |
1.2. Динамически эквивалентная модель одновального двигателя |
ms
 РR
РR
PI |
α |
CI |
|
mR |
2ω |
ω |
2α |
|
PII |
|
CII |
Рисунок 1.2 – Динамически эквивалентная модель одноцилиндрового ДВС по силам инерции I и II порядков
При вращении массы mR с постоянной угловой скоростью  возникает центробежная
возникает центробежная
сила инерции, равная |
PR |
mR R |
2 |
. |
Вектор этой силы PR имеет постоянную величину ( |
|
|
|
= const), и в любой момент времени (при любом α) направлен по кривошипу, вращаясь в том же направлении со скоростью . При поступательном движении массы mS возникает пере-
менная по величине и направлению сила инерции Pj , действующая всегда вдоль оси цилинд-
ра. Величину и направление этой силы в любой момент времени можно определить из сле-
дующего выражения:
P |
j |
m |
s |
R 2 |
(cos |
cos 2 ). |
|
|
|
|
|
Разложим силу Pj на две составляющих – первого и второго порядка:
|
|
|
|
P |
j |
m |
|
R |
2 cos |
|
m |
R |
2 cos2 |
P |
P . |
|||||
|
|
|
|
|
s |
|
|
|
|
|
s |
|
|
|
I |
|
II |
|
||
Обозначив постоянные части m |
|
R |
2 |
C |
и |
m R |
2 |
C |
|
, |
||||||||||
|
|
|
|
|
|
|
|
|
|
|
S |
|
|
|
I |
S |
|
|
II |
|
получим: Р |
I |
C |
I |
cos |
; Р |
II |
C |
II |
cos2 . |
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
В этих выражениях СI |
и СII называются фиктивными силами первого и второго поряд- |
|||||||||||||||||||
ка, а соответствующие им векторы – амплитудными фиктивными радиус-векторами. Ампли-
тудными они называются потому, что в мертвых точках КШМ (α = 0 , 180 ) эти силы равны