

В.А. Синицын
.pdfМОДУЛЬ 2. ПРАКТИЧЕСКИЕ ЗАДАЧИ УРАВНОВЕШЕННОСТИ (ОДНОВАЛЬНЫЕ ДВИГАТЕЛИ) 41
угол 30 , следовательно, плоскость действия самого момента составляет с вертикалью угол
30 . Проецируя вектор |
|
на горизонтальную плоскость, найдем величину и направле- |
|||
|
|
|
|
MCII |
|
ние |
вектора |
результирующего момента реальных сил инерции второго порядка: |
|||
M II |
M C |
cos30 |
3 |
CII lo . Для уравновешивания этого момента требуется двухваль- |
|
2 |
|||||
|
II |
|
|
||
ный уравновешивающий механизм, грузы которого в номинальном положении повернуты на
30 в направлении, противоположном вращению валов. Таким образом, полное уравновеши-
в направлении, противоположном вращению валов. Таким образом, полное уравновеши-
вание двигателя 3-цилиндрового однорядного двигателя значительно усложняет его конст-
рукцию.
2.2.5. Четырехцилиндровый четырехтактный двигатель
Проанализируем уравновешенность такого двигателя с равномерной продольно-
симметричной схемой вала (плоский вал).
По условию равенства интервалов между вспышками в цилиндрах двигателя угол ме-
жду кривошипами определится из выражения:
|
720 |
720 |
180 . |
||
кр |
|
|
|
||
iбл |
4 |
||||
|
|||||
|
|
||||
РR4
ω
2ω 
|
|
|
|
|
|
|
|
|
4 |
|||
|
|
|
|
|
|
|
||||||
РR1 |
|
|
|
|
CI3 |
|
|
CI4 |
||||
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
||||
|
|
|
CI2 |
|
2 |
|
|
|
|
3 |
|
|
|
|
|
|
|
||||||||
|
1 |
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
РR3 |
|||||
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
||||
CI1 |
|
|
РR2 |
|
|
|
|
|
|
CII 4 |
||
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
CII 3 |
|||
|
|
|
|
CII 2 |
|
|
|
|
|
|
Вспомога тельн ый в ал |
|
|
|
|
|
|
|
|
|
|
|
|
||
CII 1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
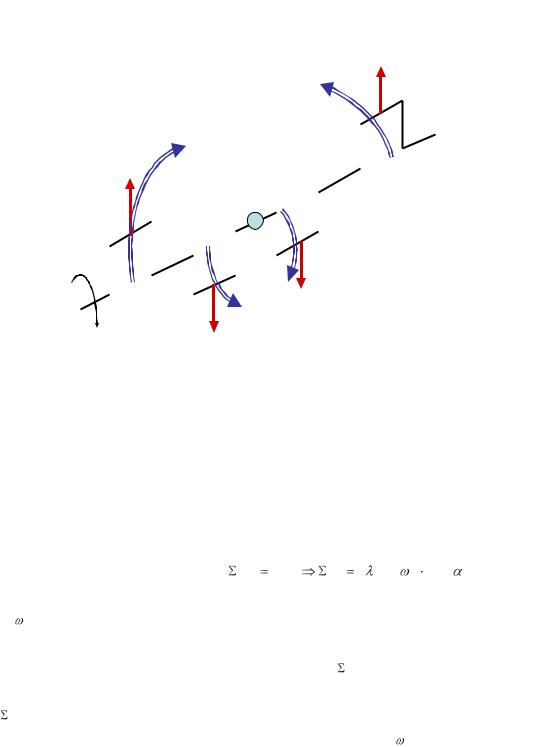
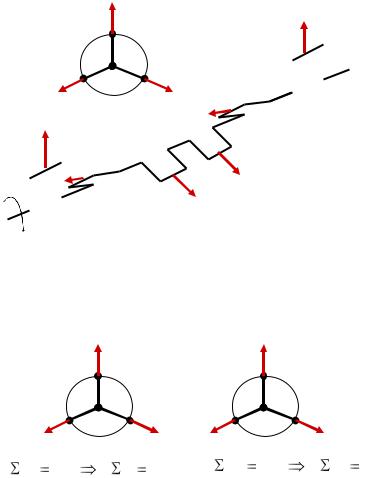
Рисунок 2.7 – К анализу уравновешенности 4-цилиндрового 4-тактного рядного двига-
теля
При этом принимается схема расположения кривошипов вала не только равномерная плоская, но и продольно-симметричная, что обусловлено стремлением самоуравновесить
42 |
2.2.5. Четырехцилиндровый четырехтактный двигатель |
двигатель по наибольшему числу признаков. Рассмотрение этой схемы (рис. 2.7) позволяет сделать выводы:
PR = 0; PI = 0; MR = 0; MI = 0; МII = 0.
PR4
|
|
|
|
|
МR1 |
MR4 |
4 |
|||
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|||
|
|
|
3 |
|
|
|
||||
|
|
|
|
|
|
|||||
PR1 |
|
|
|
|
ЦТ |
|
|
|
||
|
|
|
|
|
|
|
||||
ω |
|
1 |
|
2 |
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
||
|
|
|
|
MR3 |
PR3 |
|
||||
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
МR2 |
|
|
|
|
|
|
|
|
|
PR2 |
|
|
|
||
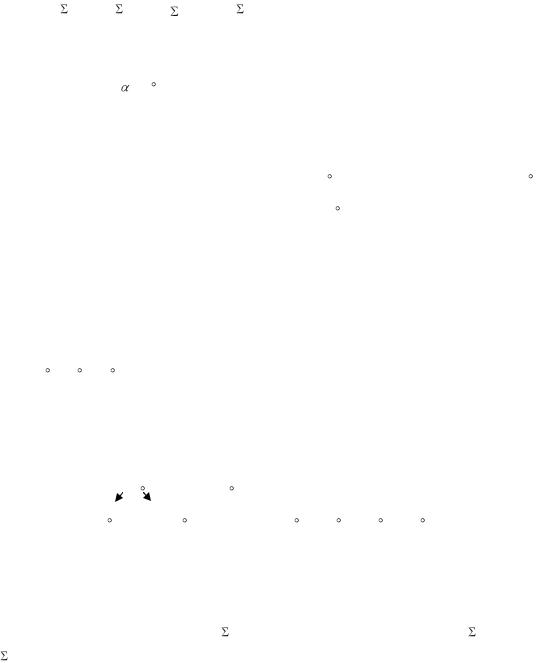
Рисунок 2.8 – Уравновешивание момента от центробежных сил в 4-цилиндровом 4-
тактном рядном двигателе
Схема расположения фиктивных радиус-векторов сил инерции второго порядка пока-
зана на рис. 2.7. Из анализа векторной диаграммы следует, что результирующий фиктивный
радиус-вектор сил инерции второго порядка С |
II |
4C |
II |
P |
4 m |
S |
R 2 |
cos 2 . |
|
|
II |
|
|
|
Эта результирующая сила, изменяющая свою величину и направление с угловой час-
тотой 2 , действует вдоль осей цилиндров, приложена к средней коренной шейке коленча-
того вала и стремится то оторвать двигатель от фундамента, то прижать к нему.
В многооборотных двигателях транспортного типа сила PII остается неуравновешен-
ной, поскольку она не вызывает существенных вибраций двигателя. В случае необходимости сила PII уравновешивается при помощи двух одинаковых масс, вращающихся в противопо-
ложных направлениях с удвоенной угловой скоростью коленчатого вала 2 .
МОДУЛЬ 2. ПРАКТИЧЕСКИЕ ЗАДАЧИ УРАВНОВЕШЕННОСТИ (ОДНОВАЛЬНЫЕ ДВИГАТЕЛИ) 43
Покажем решение обратной задачи: выбрать схему коленчатого вала и порядок работы цилиндров, обеспечивающие динамическую самоуравновешенность двигателя по силам инерции и моментам второго порядка. Поставленным условиям удовлетворяет равномерная продольно-симметричная схема расположения фиктивных векторов СII (рис. 2.7), из которой очевидно: CII = 0; PII = 0; МСII = 0; МII = 0.
Используя свойства векторов СII, перейдем к схеме расположения кривошипов, соот-
ветствующей векторной диаграмме СII. Для этого надо поставить первый кривошип в на-
чальное положение ( = 0 ), совпадающее с вектором . Положение остальных кривоши-
пов относительно первого определяется поворотом каждого вектора СIIi против вращения на
половинный угол, который составляет этот вектор с вектором СII1 первого цилиндра. На схеме вектор СII4 составляет с вектором СII1 угол 360 , а векторы СII 2 и СII 3 угол 180 ;
поворачивая их против часовой стрелки на углы 180 и 90 , получаем две равнозначные кре-
и 90 , получаем две равнозначные кре-
стообразные схемы расположения кривошипов коленчатого вала.
Анализируя возможные порядки работ цилиндров, выбираем такой, который обеспе-
чивает наиболее равномерное чередование вспышек и при котором коренные подшипники вала работают в наиболее благоприятных условиях по нагрузке, т.е. когда вспышки в сосед-
них цилиндрах разнесены на возможно больший угол. В нашем примере с точки зрения рав-
номерности вспышек все варианты одинаковы – вспышки чередуются неравномерно через углы 90 , 180 , 270 . По условиям нагружения предпочтение отдается тому варианту, в кото-
ром минимальный угол 90 соответствует наиболее удаленным друг от друга цилиндрам,
соответствует наиболее удаленным друг от друга цилиндрам,
например, вариант 1- 4- 3- 2 -1 нежелателен, т.к. близкое чередование вспышек в соседних цилиндрах 1-2 ставит в тяжелые условия работы первый коренной подшипник. Более пред-
почтительны варианты:
|
|
|
90 |
|
|
|
270 |
|
|
|
|
|
|
|
|
|
1 |
|
4 |
|
2 |
|
3 |
|
1 ; 1 |
|
3 |
|
2 |
|
4 |
|
1. |
|
|
|
|
|
|
|
|
|||||||||
|
180 |
|
180 |
|
90 |
180 |
|
270 |
|
180 |
|
|||||
Далее строятся векторные диаграммы PR и CI, анализируются и разрабатываются схе-
мы уравновешивания.
Из векторных диаграмм следует, что двигатель с крестообразным валом самоуравно-
вешен также по центробежным силам PR = 0 и силам инерции первого порядка PI = 0, т.к.
СI = 0, и неуравновешен по продольным моментам от этих сил.

44 |
2.2.5. Четырехцилиндровый четырехтактный двигатель |
PR1
PR3
ω |
PR4 |
|
PR2
18026'
∑M |
|
|
R |
1 |
|
|
||
MR2-3 |
φ |
|
2 |
||
|
||
MR1-4 |
3 |
|
|
4 |
|
|
φ |
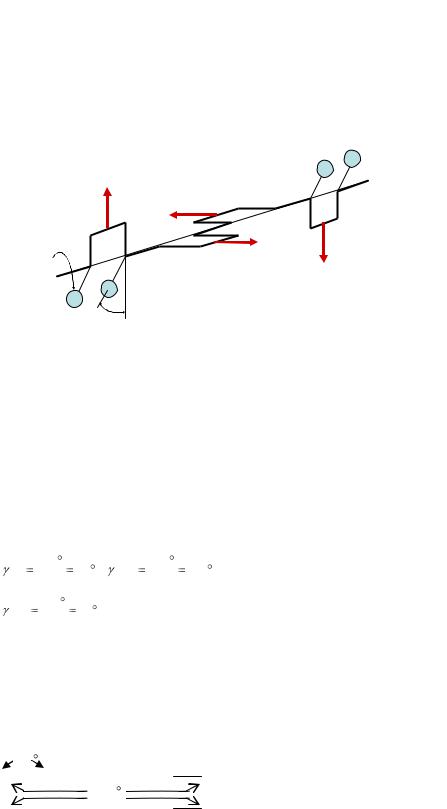
Рисунок 2.9 – Уравновешивание центробежных сил инерции и моментов от этих сил 4-
цилиндрового 2-тактного рядного двигателя
Величину и плоскость действия неуравновешенных моментов найдем из векторных многоугольников:
|
|
|
|
|
|
|
|
|
|
|
M R1 4 |
3PR l0 ; M R2 3 |
|
PR l0 ; |
M R |
|
10PR l0 ; |
|
|||
|
|
|
|
|
|
|
|
|
|
|
M CI |
3CI l0 ; M CI |
2 |
3 |
CI l0 ; |
M C |
I |
10CI l0 . |
|
||
1 4 |
|
|
|
|
|
|
|
|||
Плоскость действия результирующих моментов MR и |
составляет с вертикалью |
|||||||||
|
|
|
|
|
|
|
|
|
|
MCI |
угол 18 26 по направлению вращения. Реально действующий момент первого порядка равен:
по направлению вращения. Реально действующий момент первого порядка равен:
M |
I |
M |
C |
|
cos18 26' 3C |
l |
o |
; при повороте вала на угол : |
M |
I |
3C |
l |
o |
cos . |
|
|
I |
I |
|
|
|
I |
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
МОДУЛЬ 2. ПРАКТИЧЕСКИЕ ЗАДАЧИ УРАВНОВЕШЕННОСТИ (ОДНОВАЛЬНЫЕ ДВИГАТЕЛИ) 45
Продольный момент от центробежных сил уравновешивается противовесами по кон-
цам вала, устанавливаемыми в плоскости действия момента MR (под углом 18 26 по на-
по на-
правлению вращения) (рис. 2.10). Продольный момент от сил инерции первого порядка урав-
новешивается двухвальным уравновешивающим механизмом.
PR1
PR3
ω |
PR4 |
|
PR2
18026'
Рисунок 2.10 – Уравновешивание момента от центробежных сил 4-цилиндрового 2-
тактного рядного двигателя
2.2.6. Одновальный четырехтактный пятицилиндровый двигатель
При нечетном числе кривошипов схема коленчатого вала одинакова у четырехтактно-
го и двухтактного двигателей – равномерная продольно-несимметричная. Углы между кри-
вошипами и между вспышками определяются по условиям равномерности:
|
360 |
72 ; |
|
720 |
144 |
– 4-тактный; |
||
КР |
|
|
ВСП |
|
||||
5 |
5 |
|
||||||
|
|
|
|
|||||
|
|
|
|
|
|
|||
|
|
360 |
|
72 |
– 2-тактный. |
|
||
ВСП |
5 |
|
Рассмотрим четырехтактный двигатель (рис. 2.11). Заклинку кривошипов выберем,
исходя из наиболее благоприятных условий работы коленчатого вала, которые определяются отсутствием последовательных вспышек в соседних цилиндрах. Этим условиям удовлетво-
ряют две равнозначные схемы вала, обеспечивающие следующие порядки работы цилинд-
ров:
|
|
144 |
|
|
|
|
|
|
|
1 |
3 |
|
5 |
|
2 |
|
4 |
|
1 |
|
|
720 |
|
||||||
|
|
|
|
|
|
|
|
|
|
2 |
4 |
|
2 |
|
5 |
|
3 |
|
1 |
|
|
|
|
46 |
2.2.6. Одновальный четырехтактный пятицилиндровый двигатель |
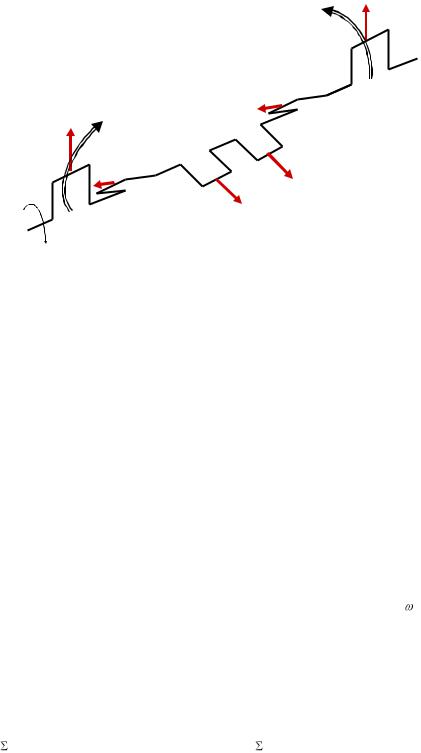
Так как эти схемы являются взаимообратными (зеркально отраженными), то, очевид-
но, что они обладают одинаковыми динамическими свойствами (меняются только знаки не-
уравновешенных моментов). Для анализа этих свойств построим векторные диаграммы дей-
ствующих сил PR, CI , CII , например, для первой схемы вала. Все диаграммы имеют схему пятиконечной звезды, следовательно, векторные многоугольники всех сил будут по форме одинаковы. На рисунке показан векторный многоугольник фиктивных сил CI. Так как много-
угольник замкнут, то и результирующий вектор равен нулю и, следовательно,
PR 0; CI 0 PI 
 0
0  PII 0 .
PII 0 .
Выбрав полюс в центре вала (на пересечении оси третьего цилиндра с осью коленча-
того вала), определим величину действующих моментов:
M |
R1 |
2P l |
; M |
R2 |
|
P l |
; M |
R3 |
|
0; M |
R4 |
|
|
P l |
; M |
R5 |
|
2P l |
; |
|||||
|
R o |
|
|
R o |
|
|
|
|
|
|
|
R o |
|
|
R o |
|
||||||||
MCI |
2CI |
lo ; MCI |
2 |
CI |
lo ; MCI |
|
0; MCI |
4 |
|
CI lo ; MCI |
|
2CI lo ; |
||||||||||||
|
1 |
|
|
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
5 |
|
|
|
|||
MCII |
2CII |
lo ; MCII |
2 |
CII |
lo ; |
MCII |
3 |
0; |
MCII |
4 |
CII |
lo ; MCII |
5 |
2CII lo |
||||||||||
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
ω
1
2(5) |
5(2) |
|
|
3(4) |
4(3) |
|
|
|
|
СI 2 |
|
|
|
СI 1 |
СI 3 |
|
Р |
|
|
R2 |
|
|
РR1 |
|
СI 4 |
СI 5 |
|
|
СI 1
ω МR5
МR5  φ
φ
МR2 |
φ |
|
МR4 |
|
|
|
|
|
|
М |
|
МR5 |
∑ |
R |
|
||
|
|
|
ω |
|
СI 1 |
2ω СII 1 |
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|||||||
СI 2 |
РR2 |
|
|
СI 5 |
СII 4 |
|
|
|
|
СII 3 |
|||||
|
|
РR1 |
|
|
|
|
|
|
|
|
|
||||
|
|
|
Р |
|
|
|
|
|
|
|
|
|
|
||
|
|
|
R5 |
|
|
|
|
|
|
|
|
|
|||
|
РR3 |
|
РR4 |
|
|
|
|
|
|
|
|
|
|||
|
|
|
СII 2 |
|
|
|
|
|
|
|
|||||
СI 3 |
|
СI 4 |
|
|
|
|
СII 5 |
||||||||
|
lо |
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
lо |
|
|
lо |
|
|
|
|
|
СI 5 |
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
СI 3 |
|
|
СI 4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
СI 2 |
|
|
|
|
|
|
|
|
|
φ |
|
|
|
РR5 |
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
РR4 |
|
М |
|
|
|
|
|
|
|
||
РR3 |
|
|
|
|
|
|
|
СII1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
φ |
|
|
|
|
|
|
|
|
|
|
|
МСII5 |
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
II |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
С |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
М |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
∑ |
|
|
|
|
|
|
|
φ = 54о |
|
|
|
|
|
|
|
МСII4 |
|
φ = |
|
18 |
о |
||
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
МСII2 |
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
||||
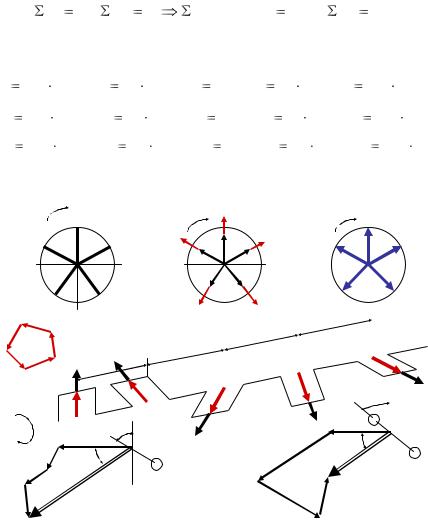
Рисунок 2.11 – Анализ уравновешенности 4-тактного 5-цилиндрового рядного двига-
теля

МОДУЛЬ 2. ПРАКТИЧЕСКИЕ ЗАДАЧИ УРАВНОВЕШЕННОСТИ (ОДНОВАЛЬНЫЕ ДВИГАТЕЛИ) 47
Откладывая в масштабе векторы этих моментов с учетом знака моментов, найдем за-
мыкающие векторы многоугольников. Величина и направление результирующих векторов определяется из решения многоугольников или непосредственным измерением. В нашем примере величина неуравновешенных моментов и углы, которые составляют плоскость дей-
ствия этих моментов с вертикалью (с плоскостью осей цилиндров), соответственно равны:
|
|
|
|
|
M R |
|
4.2PR lo ; |
M CI |
4.2CI |
lo ; |
I |
54 ; |
||
|
|
|
|
|
M C |
II |
2.5CII lo ; |
II |
18 . |
|
|
|
||
Реально действующие неуравновешенные моменты первого и второго порядков рав- |
||||||||||||||
ны: M |
I |
M |
CI |
cos |
54 |
; M |
II |
M |
CII |
cos 2 |
18 |
. |
Продольный момент от цен- |
|
|
|
|
|
|
|
|
|
|
|
|
||||
тробежных сил уравновешивается противовесами на коленчатом валу, для уравновешивания моментов первого и второго порядков требуются двухвальные уравновешивающие механиз-
мы.
Из-за сложности уравновешивания и значительного усложнения конструкции четы-
рехтактные однорядные двигатели с нечетным числом цилиндров применяются крайне ред-
ко, но в качестве продольных модулей широко используются в сложных компоновочных схемах.
2.2.7. Одновальный четырехтактный шестицилиндровый двигатель
Коленчатый вал четырехтактного 6-цилиндрового рядного двигателя принципиально может быть выполнен по двум равномерным схемам: продольно-симметричной (зеркальный вал) и продольно-несимметричной (лучевая схема). Вследствие значительных преимуществ
240зеркального вала применение другой схемы было бы неоправданным. Углы между пара-
ми симметрично расположенных кривошипов и угловые интервалы между вспышками при их равномерном чередовании определяются из очевидных соотношений:
|
360 |
360 |
120 ; |
|
720 |
120 |
||
КР |
|
|
|
ВСП. |
|
|||
iПК |
3 |
6 |
||||||
|
|
|||||||
|
|
|
|
|||||
Из всех возможных порядков работы цилиндров выбираем те, которые в большей сте-
пени удовлетворяют требованиям равномерной нагрузки подшипников вала и возможности объединения выпуска группы цилиндров при импульсном наддуве. Этим требованиям удов-
летворяют два порядка работы:
|
|
|
|
|
|
240° |
|
|
|
240° |
|
|
|
|
|
|
|||||
1 |
|
|
|
5 |
|
|
3 |
|
6 |
|
2 |
|
|
|
4 |
|
|
1 ; |
|||
|
|
|
|
|
|
|
|
|
|||||||||||||
1 |
|
|
4 |
|
|
2 |
|
|
6 |
|
|
3 |
|
|
|
5 |
|
|
1 , |
||
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
240° |
|
|
|
240° |
|
|
|
|
|
|
|
|
|
|
|||||
48 |
2.2.7 Одновальный четырехтактный шестицилиндровый двигатель |
при которых конструктивно наиболее просто можно объединить выпуск первых трех цилин-
дров и последующих трех цилиндров в отдельные коллекторы по типу «труба в трубе».
Анализ динамических свойств двигателя с первой схемой вала показывает, что такой двигатель полностью самоуравновешен по всем шести признакам.
PR 1,6
|
|
|
|
|
|
|
|
|
|
PR6 |
|
|
|
|
|
|
|
1,6 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
PR 2,5 |
2,5 |
3,4 |
|
PR 3,4 |
|
6 |
|
||
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
PR5 |
|
|
|
|
|
|
|
|
|
4 |
5 |
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
PR1 |
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
PR2 |
|
|
|
|
P |
|||
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
R4 |
||
ω |
|
1 |
|
|
2 |
|
|
|
PR3 |
||
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|||
Рисунок 2.12 – Анализ уравновешенности 4-тактного 6-цилиндрового рядного двига-
теля по центробежным силам инерции
|
|
CI 1,6 |
|
|
|
CII 1,6 |
|
|
|
|
1,6 |
|
|
|
1,6 |
|
|
|
|
|
|
|
|
|
||
CI 2,5 |
|
|
CI 3,4 |
CII 3,4 |
|
|
CII 2,5 |
|
2,5 |
3,4 |
2,5 |
3,4 |
|||||
|
|
|||||||
|
|
|
|
|
|
|
|
С 0 |
P 0 |
С 0 |
P 0 |
I |
I |
II |
II |
|
|
Рисунок 2.13 – Анализ уравновешенности 4-тактного 6-цилиндрового рядного двига-
теля по силам инерции I и II порядков
МОДУЛЬ 2. ПРАКТИЧЕСКИЕ ЗАДАЧИ УРАВНОВЕШЕННОСТИ (ОДНОВАЛЬНЫЕ ДВИГАТЕЛИ) 49
MR6 |
PR6 |
6
|
|
|
PR5 |
|
МR1 |
|
5 |
|
|
4 |
|
|
|
|
|
PR1 |
|
|
|
|
|
3 |
|
PR2 |
|
|
P |
|
|
|
R4 |
ω |
|
2 |
|
1 |
|
|
PR3 |
|
|
|
Рисунок 2.14 – Анализ уравновешенности 4-тактного 6-цилиндрового рядного двига-
теля по моментам от центробежных сил инерции
Проанализируем второй вариант вала, используя не пространственную, а упрощенную плоскую схему вала. Из векторных диаграмм и векторных многоугольников видно, что дви-
гатель с коленчатым валом по второму варианту также самоуравновешен по всем шести при-
знакам.
2.2.8. Одновальный двухтактный шестицилиндровый двигатель с клапанно - ще-
левой продувкой
Рассматриваемый двигатель – двухтактный, многооборотный, поэтому высокое каче-
ство процессов очистки и зарядки его цилиндров может быть достигнуто применением пря-
моточной продувки, что при одновальном исполнении двигателя приводит к необходимости применения прямоточной клапанно-щелевой продувки.
В двигателе имеется кулачковый вал, вращающийся с угловой скоростью , который может быть использован для уравновешивания продольного момента сил инерции первого порядка. В этом случае уравновешивающий механизм первого порядка значительно упроща-
ется, т.к. требуется только один дополнительный вал.
Схема расположения кривошипов коленчатого вала при двухтактном цикле может быть только лучевая, которая обеспечивает самоуравновешенность двигателя по центробеж-
ным силам PR = 0 и силам инерции первого порядка PI = 0. Следовательно, необходимо
50 2.2.8. Одновальный двухтактный шестицилиндровый двигатель с клапанно - щелевой продувкой
выбрать такую лучевую схему вала, которая бы обеспечивала самоуравновешенность двига-
теля по силам инерции второго порядка и продольным моментам от этих сил.
Выполнение этого условия возможно при четном числе кривошипов и продольно-
симметричной равномерной схеме расположения фиктивных радиус-векторов второго по-
рядка. Такая схема для рассматриваемого 6-цилиндрового одноблочного двигателя представ-
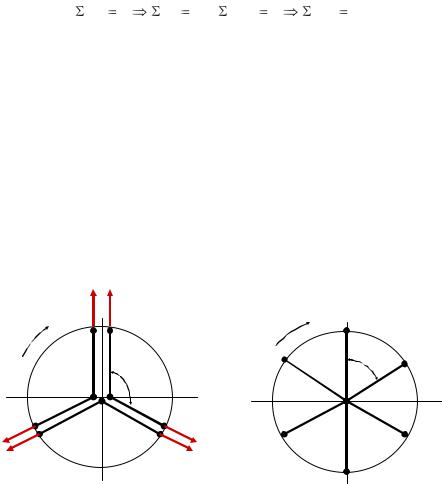
лена на рисунке 2.15 а. Тогда с учетом изложенного ранее
СII 0 PII 0; M cII 0 M II 0.
Схема расположения кривошипов вала рассматриваемого двигателя может быть полу-
чена из заданной схемы расположения фиктивных радиус-векторов второго порядка «свер-
тыванием» ее вдвое, т.е. уменьшением вдвое углов между составляющими ее векторами при сохранении их продольной нумерации для соответственных кривошипов вала.
Из полученных таким образом вариантов схемы расположения кривошипов следует выбрать такой, при котором исключалась бы последовательная работа соседних цилиндров с целью недопущения перегрузки коренных подшипников коленчатого вала. Удовлетворяю-
щая всем поставленным условиям единственно возможная схема расположения кривошипов показана на рисунке 2.15 б.
|
СII 1 |
CII 6 |
|
|
|
|
|
|
|
|
|
ω |
1 |
2ω |
|
|
|
|
||
|
|
|
|
|
||
|
|
|
5 |
|
|
60о |
|
|
|
|
|
4 |
|
|
|
|
|
|
|
|
|
|
120о |
|
|
|
|
|
|
|
|
3 |
|
2 |
|
|
|
|
|
|
|
СII 2 |
CII 5 |
СII 3 |
CII 4 |
|
|
|
6
а) б)
Рисунок 2.15 – Переход от равномерной продольно-симметричной схемы расположе-
ния фиктивных радиус-векторов второго порядка к соответственной схеме расположения кривошипов коленчатого вала