

В.А. Синицын
.pdfМОДУЛЬ 2. ПРАКТИЧЕСКИЕ ЗАДАЧИ УРАВНОВЕШЕННОСТИ (ОДНОВАЛЬНЫЕ ДВИГАТЕЛИ) 61
Схема
|
|
|
|
|
|
|
СI |
СI |
3 |
СI |
7 |
СI |
4 |
СI |
8 |
СI |
6 |
СI |
2 |
СI |
5 |
СI |
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
1 |
|||||||
СII |
СII |
3.6 |
СII |
2.7 |
СII |
4.5 |
СII |
|
|
|
|
|
|
360 |
|
|
|
|
|
|
|
|
1.8 |
|
|
|
1.8 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
СI |
СI |
6 |
СI |
2 |
СI |
5 |
СI |
8 |
СI |
3 |
СI |
7 |
СI |
4 |
СI |
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
1 |
|||||||
360
ω
4(3)
5(6)
ω
CI3
CI5
щ
МСI 3-6
МСI 2-7
1 8 |
|
РR1 |
РR8 |
||
|
|
ω |
|
|
|
|
4(3) |
РR3 |
РR4 |
||
|
|
|
|
|
|
|
6(5) |
РR6 |
|
РR5 |
|
|
|
|
|
|
|
|
|
|
|
|
|
2 7 |
|
РR2 |
РR7 |
||
CI1 |
CI8 |
,СII8 |
|
CII1,СII2,СII7 |
2ω
CI4
CI5
CI2 |
CI7 |
CII3,СII4,СII5,СII6 |
МСI 4-5 |
|
|
|
|
МСI 3-6 |
∑МCI |
|
МСI 2-7 |
|
|
∑МCI |
МСI 1-8 |
|
МСI 1-8 |
|
|
∑МCI |
|
∑МCI |
МСI 4-5 |
МСI 4-5 |
|
МСI 2-7 |
|
|
|
|
|
МСI 3-6 |
МСI 3-6 |
|
|
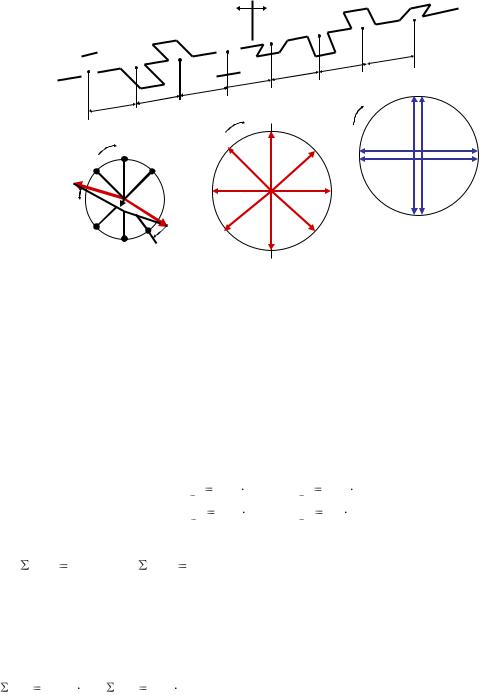
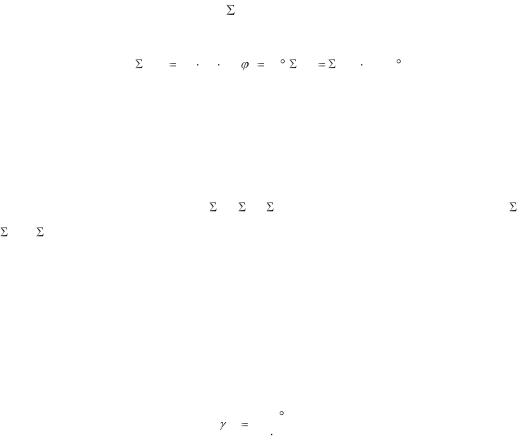
Рисунок 2.21 – Решение обратной задачи уравновешенности 2-тактного 8-
цилиндрового рядного двигателя
62 |
2.2.12. Одновальный двухтактный 8-цилиндровый двигатель |
|
|
|
|
|
|
|
|
|
7 |
8 |
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
Левый |
|
|
|
Правый |
|
|
|
|||
|
|
|
|
3 |
|
|
4 |
|
6 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
1 |
|
|
|
|
|
|
|
|
|
|
|
|||
|
2 |
|
|
|
|
|
lо |
lо |
|
|||||
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
lо |
|
lо |
5 lо |
CII 1 |
CII 4 |
|||
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
lо |
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
lо |
|
|
|
2ω |
|
|
|
|||
|
|
|
|
|
|
|
ω |
|
|
|
|
|
||
|
|
|
|
|
|
|
|
CI1 |
|
|
|
|||
|
|
ω |
|
|
CI 7 |
|
|
|
CI 8 |
CII 6 |
|
CII 5 |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
||
∑МСI л |
|
|
|
|
|
|
|
|
2ω |
|
CII 8 |
|||
|
|
|
|
|
CI 3 |
|
|
|
CI 2 |
CII 7 |
|
|||
18026/ |
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
∑МСI пр |
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
CII 2 |
CII 3 |
|||
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
18026/ |
CI 5 |
|
|
CI 6 |
|
|
|
|||
|
|
|
|
|
|
|
|
CI |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
4 |
|
|
|
|
|
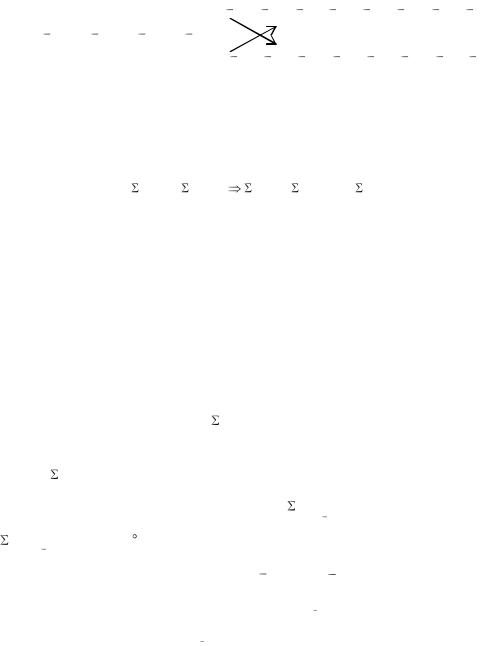
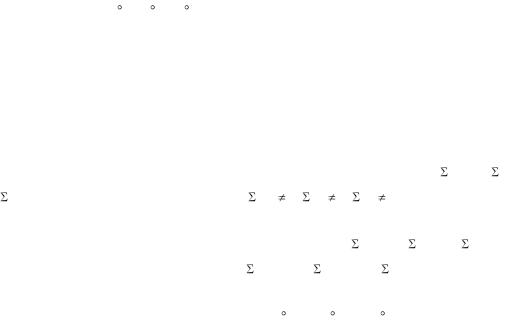
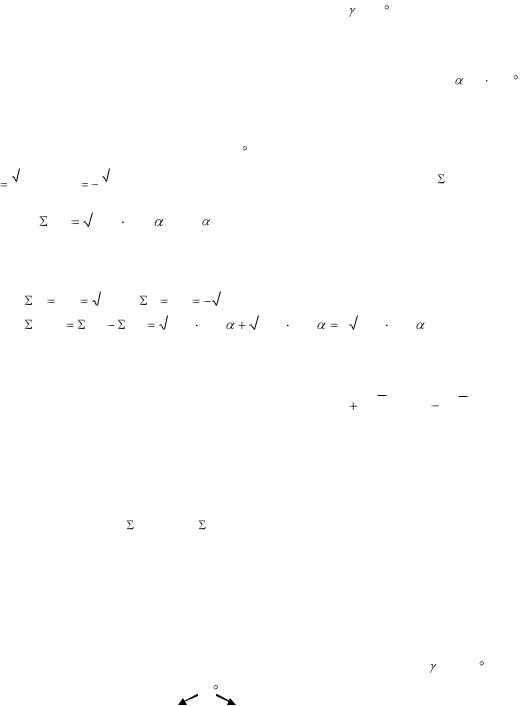
Рисунок 2.22 – Решение обратной задачи уравновешенности 8-цилиндрового 2-
тактного рядного двигателя
Результирующие неуравновешенные моменты фиктивных сил первого порядка опре-
деляются графически из векторных многоугольников. Величина составляющих моментов,
образуемых симметричными парами сил, в рассматриваемом случае равна:
M CI |
7C |
1 8 |
|
M CI3 6 |
3C |
I lo ; M CI2 7 |
5CI lo ; |
I lo ; M CI4 5 |
CI lo . |
Для двух возможных схем векторов CI значения результирующих моментов рав-
ны: M CI 8,8CI  lo ; M CI 6CI
lo ; M CI 6CI  lo .
lo .
Так как векторная диаграмма сил CI повторяет собой схему расположения кривоши-
пов и векторную диаграмму центробежных сил, то порядок работы цилиндров определяется чередованием векторов CI по направлению вращения, а результаты анализа моментов перво-
го |
порядка |
применимы |
и |
для |
центробежных |
моментов, |
т.е.: |
M R |
8,8PR lo ; |
M R 6PR lo . |
Другой |
вариант |
нормальной продольно-симметричной |
||
МОДУЛЬ 2. ПРАКТИЧЕСКИЕ ЗАДАЧИ УРАВНОВЕШЕННОСТИ (ОДНОВАЛЬНЫЕ ДВИГАТЕЛИ) 63
схемы векторов дает еще две векторные диаграммы CI (и, соответственно, две схемы колен-
чатого вала):
|
|
|
|
|
|
|
СI |
СI |
4 |
СI |
7 |
СI |
3 |
СI |
8 |
СI |
5 |
СI |
2 |
СI |
6 |
СI |
|||||||
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
1 |
||||||||||||||
СII |
СII |
4.5 |
СII |
2.7 |
СII |
3.6 |
СII |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1.8 |
|
|
|
1.8 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
СI |
СI |
5 |
СI |
2 |
СI |
6 |
СI |
8 |
СI |
4 |
СI |
7 |
СI |
3 |
СI |
|||||||
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|||||||
При этих схемах величина результирующих неуравновешенных моментов ∑МR и ∑МСI
такая же, что и в рассмотренном выше варианте. Очевидно, что при всех четырех схемах вала обеспечивается самоуравновешенность по всем действующим силам:
PR = 0; CI = 0 PI = 0; CII = 0  PII = 0.
PII = 0.
Из анализа следует, что при всех схемах вала, соответствующих нормальной продоль-
но-симметричной схеме векторов CII, двигатель самоуравновешен по четырем признакам (по всем силам и моменту второго порядка), но результирующий момент первого порядка дости-
гает большой величины и его необходимо уравновесить.
Вариант II (рис. 2.23). Попытаемся, не нарушая продольной симметрии векторов CII,
найти такую схему вала, при которой результирующий момент первого порядка был бы на-
столько мал, что его можно было бы не уравновешивать. При сохранении симметрии векто-
ров плечи составляющих моментов и величина самих моментов не изменяется. Следователь-
но, уменьшить замыкающий вектор |
можно, изменив направление составляющих век- |
|
MCI |
торов. Из векторных многоугольников предыдущего варианта видно, что для уменьшения
вектора |
необходимо все составляющие векторы устремить в сторону полюса диа- |
||||||||
|
MCI |
|
|
|
|
|
|
|
|
граммы. Тогда, наметив полюс и проведя вектор |
M CI |
, из его конца откладываем вектор |
|||||||
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
1 8 |
|
|
M CI 2 |
под углом 45 в сторону полюса. Одновременно на векторной диаграмме CI откла- |
||||||||
7 |
|
|
|
|
|
|
|
|
|
дываем соответствующие пары векторов CI |
CI |
и |
CI |
|
CI |
в плоскостях, перпендикуляр- |
|||
|
|
|
1 |
8 |
|
2 |
|
7 |
|
ных векторам этих пар. Затем из конца вектора |
M C |
I 2 7 |
перпендикулярно к нему в сторону |
||||||
|
|
|
|
|
|
|
|
||
полюса откладываем вектор M C |
|
и находим на векторной диаграмме соответствующее |
|||||||
|
|
I 3 |
6 |
|
|
|
|
|
|
положение векторов CI3 и CI6 .
64 2.2.12. Одновальный двухтактный 8-цилиндровый двигатель
|
|
|
8 |
|||
|
|
lо |
6 |
|
|
|
lо |
5 |
|
|
lо |
|
|
|
|
|
||||
|
|
|
|
|||
|
|
|
|
|||
|
|
|
||||
lо |
4 |
|
7 |
|
|
|
|
lо |
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|
|
|
|
||
1
lо
2
CII 1 CII 7
2ω
ωCI1
|
ω |
|
|
C |
I 6 |
|
|
C |
I 8 |
CII 6 |
CII 2 |
|
|
|
|
|
|
|
|
|
|
|
|||
∑МСI л |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2ω |
|
||
|
|
|
CI 5 |
|
|
|
CI 3 |
CII 4 |
CII 8 |
|||
18026/ |
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
∑МСI пр |
|
|
|
|
|
CII 3 |
CII 5 |
|||
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
||
|
|
18026/ |
|
CI 2 |
|
CI 4 |
|
|
||||
|
|
|
|
|
|
C |
|
|
|
|
|
|
|
|
|
|
|
|
|
I 7 |
|
|
|
|
|
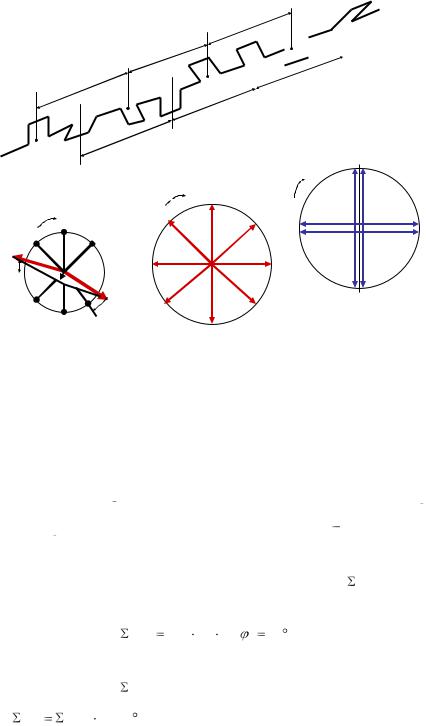
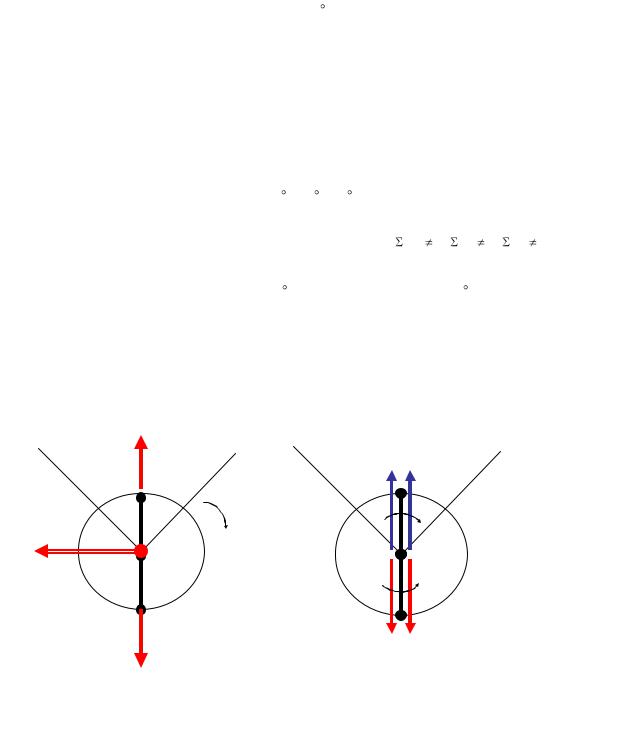
Рисунок 2.23 – Решение обратной задачи уравновешенности 8-цилиндрового 2-
тактного рядного двигателя
Из конца вектора |
в сторону полюса перпендикулярно вектору |
M CI1 |
откла- |
||||
|
|
M CI 3 6 |
|
|
|
8 |
|
дываем вектор M C |
|
и находим положение последней пары C |
|
C |
. Замерив длину и |
||
|
I 4 5 |
|
I4 |
|
I5 |
|
|
угол с горизонталью замыкающего вектора, находим величину и плоскость действия неурав-
новешенного результирующего фиктивного момента первого порядка MCI . В нашем при-
мере они равны:
|
|
|
|
|
MC |
I |
1,41 CI lo ; I 17 . |
Неуравновешенный реально действующий момент первого порядка определится как |
|||||||
проекция фиктивного момента |
MCI |
на плоскость, перпендикулярную плоскости осей ци- |
|||||
|
|
|
|
|
|
||
линдров, т.е. M |
I |
M |
CI |
cos17 . Величина этого момента невелика, и его можно оставить |
|||
|
|
|
|
|
|
||
неуравновешенным.
МОДУЛЬ 2. ПРАКТИЧЕСКИЕ ЗАДАЧИ УРАВНОВЕШЕННОСТИ (ОДНОВАЛЬНЫЕ ДВИГАТЕЛИ) 65
Переходя от векторной диаграммы CI к схеме векторов CII, убеждаемся, что она во |
|
всех случаях равномерная продольно-симметричная и, следовательно, CII = 0 и M C |
0 . |
|
II |
На рис. 2.23 стрелками показан последовательный ход рассуждений при решении задачи на основе продольной симметрии векторов CII.
Возможен другой подход к решению задачи, основанный на известных результатах
уравновешенности двигателя с четырехколенным крестообразным валом.
Вариант III, рис. 2.23. Рассматриваем 8-коленный вал исходного двигателя состоящим из двух 4-коленных крестообразных валов – левого и правого. Приняв схему левого вала та-
кой же, как в четырехцилиндровом двигателе, 1—3—4—2—1, отложим вектор результи-
рующего фиктивного момента |
под углом 18 26 к горизонтали. Затем надо выбрать |
||
|
MCIЛ |
|
|
такую схему правого вала, чтобы вектор правого результирующего момента |
|
был |
|
|
|
MCIПР |
|
противоположно направлен и минимально отклонялся от линии действия вектора |
. |
||
|
|
|
MCIЛ |
Это достигается, если крайние кривошипы 1 4 правого вала направить противоположно, а
средние 2 3 направить так же, как соответствующие кривошипы левого вала. Полученный правый вал со схемой 4—3—1—2—4 необходимо развернуть относительно левого вала по направлению вращения на 45 . Получим 8-коленный вал с заклинкой кривошипов 1—7—3— 5—4—6—2—8—1, при котором неуравновешенный результирующий момент первого по-
рядка равен: |
MC |
0,45 CI |
lo ; I |
67 ; |
M I |
|
MC |
cos67 . |
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
I |
|
|
|
|
|
|
|
I |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Величина момента очень мала, и его можно не уравновешивать. |
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
Переходя от векторной диаграммы CI к схеме фиктивных сил CII, получим равномер- |
|||||||||||||||||||||||
ную продольно-несимметричную диаграмму. В этой диаграмме пары векторов CII |
1 |
CII |
4 |
и |
|||||||||||||||||||||||
CII |
|
|
|
CII |
|
представляют левый вал, а пары CII |
|
CII |
и |
CII |
|
|
CII |
– |
правый вал. Так |
||||||||||||
|
2 |
|
|
3 |
|
|
|
|
|
|
|
|
|
5 |
|
8 |
|
6 |
|
|
7 |
|
|
|
|
|
|
как в |
отдельности |
для |
правого |
вала |
СII |
ПР |
0, |
М С |
II ПР |
0 |
и левого |
вала |
|||||||||||||||
СII |
Л |
0, |
М С |
II Л |
0 , |
|
то |
и |
для |
|
всего |
|
восьмиколенного |
|
вала |
||||||||||||
С |
II |
|
0; |
|
M |
CII |
0; |
P |
0; |
M |
II |
0 . |
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
II |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
Вариант IV, рис. 2.23. Здесь использован тот же принцип, что и в предыдущем вариан- |
|||||||||||||||||||||||
те, но принята другая компоновка составляющих четырехколенных |
валов. Один вал с нор- |
||||||||||||||||||||||||||
мальной крестообразной схемой I |
III |
IY II |
I образован нечетными кривошипами, |
||||||||||||||||||||||||
другой – с зеркальной парой крайних кривошипов IY |
III |
I II |
|
IY |
- образован чет- |
||||||||||||||||||||||
ными кривошипами 8-коленного вала. Оба вала имеют одинаковые плечи моментов L0 = 2l0 |
и |
||||||||||||||||||||||||||
развернуты друг относительно друга на 45 . Каждый из валов обеспечивает самоуравнове-
66 2.2.12. Одновальный двухтактный 8-цилиндровый двигатель
шенность по всем силам и продольным моментам второго порядка. Результирующий неурав-
новешенный момент первого порядка |
определяется геометрическим сложением век- |
|
MCI |
торов составляющих моментов четного и нечетного валов:
M |
C |
|
0,9 C |
I |
l |
; |
I |
67 ; M |
I |
M |
C |
cos67 . |
|
I |
|
o |
|
|
|
I |
Величина момента незначительна и его можно не уравновешивать.
Общие выводы по уравновешенности однорядных двигателей
1. |
При равномерной продольно-симметричной схеме расположения радиус-векторов |
|||
PR, CI, |
CII результирующие силы |
PR, |
CI, |
CII и продольные моменты от этих сил MR, |
MCI, MCII равны нулю, т.е. однорядный двигатель самоуравновешен по соответствующим |
||||
силам и моментам. |
|
|
|
|
2. |
Векторные диаграммы |
PR и |
CI |
могут быть равномерными и продольно- |
симметричными только при равномерной продольно-симметричной схеме расположения кривошипов коленчатого вала, которая характеризуется следующими признаками:
−каждая пара равноудаленных от центра тяжести вала кривошипов лежит в одной плоскости и имеет одинаковое направление;
−пары продольно-симметричных кривошипов равномерно распределены по окружно-
сти, т.е. образуют равные углы |
|
360 |
. |
|
КР |
|
|
||
|
0,5 |
iКР |
|
|
|
|
|
||
Условие самоуравновешенности рядного двигателя по центробежным силам, силам
инерции первого порядка и продольным моментам от этих сил может быть выполнено во всех четырехтактных двигателях с четным числом цилиндров. В двухтактных двигателях равномерная продольно-симметричная схема вала неприменима (неизбежны одновременные вспышки в двух цилиндрах), а, следовательно, невозможны и продольно-симметричные схе-
мы векторов PR, CI.
3. Равномерная продольно-симметричная векторная диаграмма CII может быть полу-
чена в 4 и 2 –тактных рядных двигателях с четным числом цилиндров при любой равномер-
ной схеме вала, получаемой из схемы расположения векторов CII уменьшением в два раза углов между соответствующими векторами.
4. Результаты анализа уравновешенности одноблочных двигателей справедливы и для двигателей сложных компоновочных схем, которые композиционно составлены из этих од-
ноблочных модульных двигателей.
МОДУЛЬ 3. ПРАКТИЧЕСКИЕ ЗАДАЧИ УРАВНОВЕШЕННОСТИ (ДВУХРЯДНЫЕ ДВИГАТЕЛИ) 67
МОДУЛЬ 3. ПРАКТИЧЕСКИЕ ЗАДАЧИ УРАВНОВЕШЕННОСТИ (ДВУХРЯДНЫЕ ДВИГАТЕЛИ)
2.3. Двухрядные двигатели
Транспортный двигатель 4 V 
По условиям компоновки двигателя на транспортном средстве двигатель должен иметь минимальные габаритные размеры по высоте. Этим требованиям удовлетворяют углы между цилиндрами 90 , 120 , 180 . Динамические свойства продольного двухцилиндрового модуля для всех V- образных двигателей одинаковы и зависят только от схемы расположе-
ния кривошипов коленчатого вала. В 2 – тактных двигателях возможна только несимметрич-
ная схема вала, при которой оба кривошипа лежат в одной плоскости, но направлены в про-
тивоположные стороны. В четырехтактных двигателях возможны две схемы вала – несим-
метричная и симметричная, когда оба кривошипа лежат в одной плоскости и имеют одинако-
вое направление. Известно, что двухцилиндровый рядный двигатель любой тактности с не-
симметричной схемой вала самоуравновешен по следующим трем признакам: |
PR = 0, |
PI = |
|||||||
0, MII =0 и неуравновешен по оставшимся: |
MR |
0, |
MI |
0, |
PII |
0. |
|
|
|
Четырехтактный 2-цилиндровый рядный двигатель с продольно-симметричной схемой |
|||||||||
вала самоуравновешен по продольным моментам от всех сил: |
MR |
= 0, |
MI |
= 0, MII |
= 0 и |
||||
неуравновешен по всем действующим силам |
PR = 2PR, |
PI |
= 2 PI, |
PII |
= 2 PII. |
|
|||
Используя эти данные и свойства плоских |
Y- образных отсеков, выполним анализ |
||||||||
уравновешенности транспортных двигателей 4V90 , 4V120 , 4V180 |
по оставшимся неурав- |
||||||||
новешенным признакам. |
|
|
|
|
|
|
|
|
|
2.3.1. Транспортный двигатель 4 V 90
Требуется выбрать схему коленчатого вала, пригодную для 2 и 4 – тактного двигателя,
определить порядки работы по блоку, по отсеку и по двигателю в целом и выполнить анализ уравновешенности.
Для 2-тактного двигателя симметричная схема вала неприменима, т.к. в этом случае неизбежны одновременные вспышки в двух цилиндрах блока, поэтому выбираем схему плоского несимметричного вала. Порядки работы цилиндров в 2-тактном двигателе одно-
значно определяются схемой расположения кривошипов и вспышки назначаются при каж-
68 |
2.3.1. Транспортный двигатель 4 V 90 |
дом положении кривошипа в ВМТ соответствующих цилиндров (рис. 2.24). В результате по-
лучается равномерное чередование вспышек через 90 .
В 4 – тактном двигателе возможны два варианта порядков работы по блоку и по отсе-
ку. Возможны также разные порядки работы цилиндров по левому и правому блокам. Раз-
личные сочетания порядков работы по блокам и по отсеку позволяют из множества вариан-
тов выбрать оптимальный порядок работы по двигателю, удовлетворяющий известным тре-
бованиям. В нашем случае все варианты практически равнозначны по равномерности выход-
ного крутящего момента и условиям нагружения подшипников коленчатого вала. В качестве примера на рис. 2.24 приведены два варианта порядка работы цилиндров по двигателю с не-
равномерным чередованием вспышек через 90 - 180 - 270 . Все другие варианты аналогичны этим.
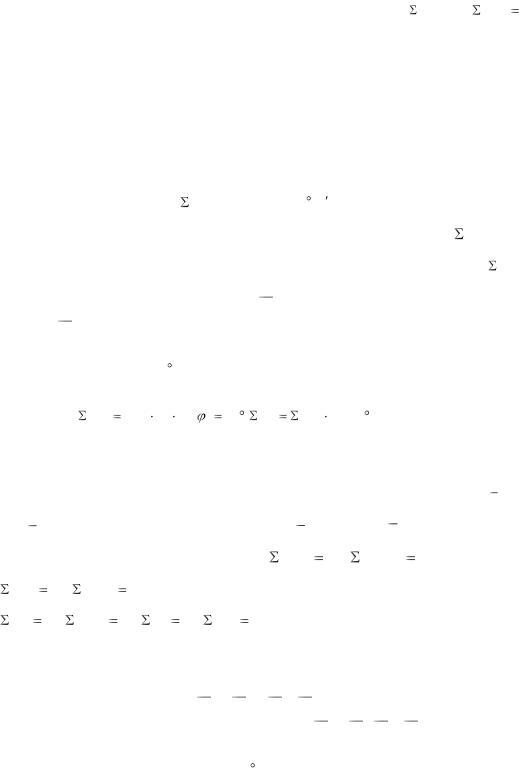
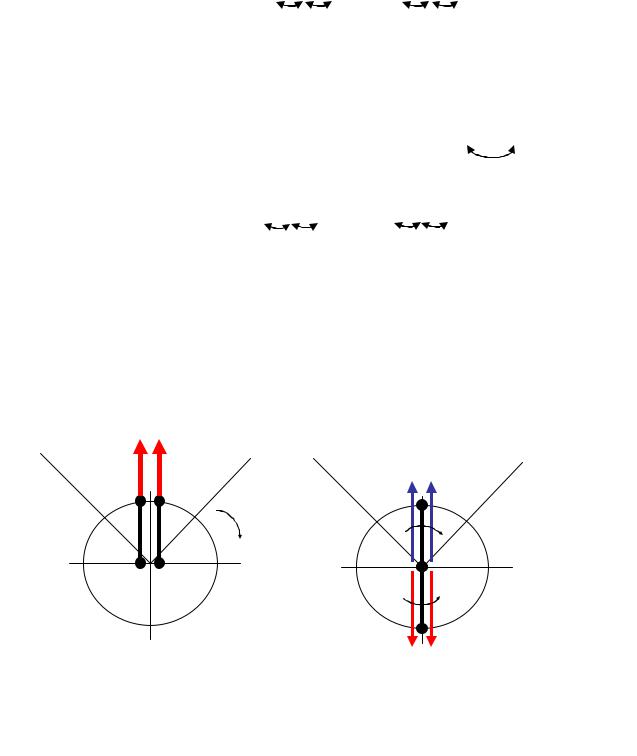
Для анализа уравновешенности по оставшимся признакам ( MR 0, MI |
0, |
PII 0) |
||
строятся динамически эквивалентные модели двигателя ДЭМ I и ДЭМ II, состоящие из соот- |
||||
ветствующих моделей плоских отсеков 2V 90 . Известно, что в отсеке 2V 90 |
вектор |
Р = 0, |
||
поэтому ДЭМ I двигателя 4V 90 |
будет состоять из двух векторов Q = F + PR, направленных |
|||
по кривошипам. Силы Q1 |
и Q2 |
создают в продольной плоскости симметрии двигателя не- |
||
уравновешенный момент |
MQ1-2 = Q lo, который легко уравновешивается выносными проти- |
|||
вовесами на концах коленчатого вала. |
|
|
||
Л |
Q1 |
П |
|
Л |
|
П |
||
|
|
|
||||||
|
|
|
|
|||||
|
|
|
|
|
|
K1 |
|
K2 |
|
|
|
|
ω |
|
|
||
∑MQ |
|
|
|
|
|
|
2ω |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2ω |
|
|
Q2 |
|
|
|
Z1 |
|
Z2 |
|
|
|
|
|
|
|||
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
Рисунок 2.24 – Анализ уравновешенности двигателя 4V90° (несимметричный вал)
МОДУЛЬ 3. ПРАКТИЧЕСКИЕ ЗАДАЧИ УРАВНОВЕШЕННОСТИ (ДВУХРЯДНЫЕ ДВИГАТЕЛИ) |
69 |
|||||||||||||||||
Порядок работы цилиндров: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
По блоку 1 – 2 |
– 1, по отсеку 1л – 1п – 1л |
|
|
||||||||||||||
А) 2-тактный: |
180° |
|
180° |
|
|
90° |
270° |
|
|
|
|
|
||||||
По двигателю |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Л |
1 |
|
|
|
|
|
2 |
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
П |
|
|
1 |
|
|
|
|
2 |
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
90° |
|
|
|
||||
Б) 4-тактный: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
По блоку 1 – 2 – 1, по отсеку 1л – 1п – 1л |
|
|
|||||||||||||||
|
180° 540° |
|
|
450° 270° |
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
По двигателю |
|
Л |
|
1 |
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
П |
|
|
|
|
|
|
|
|
|
1 |
|
|
2 |
|||
|
|
П |
|
|
|
1 |
2 |
|
|
|
|
|
|
|
|
|||
Q1 |
Q2 |
П |
|
|
Л |
|
Л |
П |
|
|
|
|||
|
|
|
|
K1 K2
ω
2ω
2ω
Z1 Z2
Рисунок 2.25 – Анализ уравновешенности двигателя 4V90° (симметричный вал)
70 2.3.1. Транспортный двигатель 4 V 90
При построении ДЭМ II кривошип первого блока ставится в начальное положение и |
|
по нему направляется вектор К1. Так как векторы К и Z при |
= 90 симметричны относи- |
тельно оси Х, то вектор Z1 направлен в сторону, противоположную вектору К1. Для опреде- |
|
ления направления вектора К2 второго отсека надо вектор К1 |
повернуть по направлению |
вращения вала на удвоенный угол между первым и вторым кривошипом, т.е. на = 2 180 . |
|
Для определения направления вектора Z2 надо вектор Z1 повернуть против вращения вала на удвоенный угол между кривошипами. В результате получаем векторную диаграмму ДЭМ II.
Известно, |
что в |
каждом из отсеков 2V90 |
величина векторов К и Z численно равна |
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
K |
|
2 C |
|
и Z |
|
|
|
|
|
2 C |
, сумма проекций векторов на ось У равна нулю ( PIIу = 0), а на |
|||||||||||||
|
2 |
|
II |
|
|
2 |
|
II |
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
ось |
Х - |
|
PIIч |
|
2CII |
sin 2 |
, где |
– угол поворота кривошипа 1 от начального положе- |
||||||||||||||||
ния. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Из векторной диаграммы ДЭМ II находим результирующие неуравновешенные силы: |
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
K 2K 2CII ; Z 2Z |
|
2CII ; |
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
PII ( X ) |
K X |
Z X |
2CII |
sin 2 |
|
2CII sin 2 |
2 2CII sin 2 . |
||||||||||||||
Таким образом, в двигателе 4V 90 любой тактности с несимметричной схемой вала в поперечном направлении (вдоль оси Х) действует неуравновешенная сила инерции, амплиту-
любой тактности с несимметричной схемой вала в поперечном направлении (вдоль оси Х) действует неуравновешенная сила инерции, амплиту-
да которой изменяется с удвоенной частотой в интервале от 2
 2CII до 2
2CII до 2
 2CII . Для уравновешивания этой силы требуется двухвальный уравновешивающий механизм второго порядка.
2CII . Для уравновешивания этой силы требуется двухвальный уравновешивающий механизм второго порядка.
Равномерная продольно-симметричная схема вала в четырехтактном двигателе обес-
печивает равномерный выходной крутящий момент и самоуравновешенность по продольным моментам от сил Q, т.е. MR = 0 и MI = 0. Векторная диаграмма ДЭМII полностью повто-
ряет соответствующую диаграмму двигателя с несимметричным валом, следовательно и, вы-
воды по уравновешенности остаются теми же.
2.3.2. Транспортный двигатель 4V 120
Порядки работы цилиндров двигателя с несимметричной схемой вала ( КР = 180 ):
двухтактный |
|
60 |
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
Л |
1 |
|
|
|
2 |
|
|
|
П |
|
|
|
1 |
|
|
2 |
|
|
|
|
|
|
|
|
|