

В.А. Синицын
.pdfМОДУЛЬ 2. ПРАКТИЧЕСКИЕ ЗАДАЧИ УРАВНОВЕШЕННОСТИ (ОДНОВАЛЬНЫЕ ДВИГАТЕЛИ) 31
МОДУЛЬ 2. ПРАКТИЧЕСКИЕ ЗАДАЧИ УРАВНОВЕШЕННОСТИ (ОДНОВАЛЬНЫЕ ДВИГАТЕЛИ)
2.1. Последовательность анализа уравновешенности
Различают три вида постановки задач на уравновешенность – прямую (анализ), обрат-
ную (синтез) и смешанную. Все эти задачи решаются на основе динамически эквивалентных моделей рассматриваемого двигателя, которые представляют собой жесткие системы реаль-
ных или фиктивных радиус-векторов сил инерции, действующих в каждом цилиндре и плос-
ком отсеке двигателя. Так как динамические свойства двигателя зависят от схемы компонов-
ки, схемы расположения кривошипов коленчатого вала и порядков работы цилиндров по блоку, отсеку и двигателю в целом, то обычно любая задача уравновешенности решается в комплексе с выбором оптимальных схем компоновки, коленчатого вала и всех порядков ра-
боты цилиндров. Рассмотрим последовательность анализа уравновешенности двигателя про-
извольной компоновочной схемы.
1) Выбирается наиболее рациональная компоновочная схема, обеспечивающая, в
первую очередь, удовлетворение главных требований к двигателю. Рассматриваются вариан-
ты схем коленчатого вала и порядков работы цилиндров и выбирается один или несколько для последующего анализа уравновешенности.
2) Выделяется продольный одноблочный модуль и для него составляется векторная диаграмма центробежных сил инерции PR. Векторы PR разносятся вдоль коленчатого вала по плоской или пространственной схеме. По этой схеме геометрическим сложением определя-
ются результирующие радиус-векторы центробежных сил PR и продольных моментов от этих сил МR. Плоскость действия результирующего момента всегда перпендикулярна век-
тору этого момента. Если результирующие силы и моменты не равны нулю (одноблочный двигатель не самоуравновешен по рассматриваемым признакам), то определяется их величи-
на и величина уравновешивающих масс, которые располагаются на коленчатом валу в соот-
ветствии со свойствами уравновешиваемых сил и моментов.
3)Составляются векторные диаграммы фиктивных сил инерции ПДМ первого по-
рядка CI в соответствии с их свойствами. По схеме расположения векторов CI определяются результирующие векторы фиктивных сил CI и их моментов МCI. Так как векторы PR и CI
обладают одинаковыми свойствами, то можно строить совмещенные векторные диаграммы или использовать качественные результаты анализа по центробежным силам и моментам для фиктивных сил и моментов первого порядка. Затем осуществляется переход от фиктивных сил и моментов к реальным, которые всегда действуют в плоскости осей цилиндров. Для это-
го результирующий радиус-вектор CI проектируется на плоскость осей цилиндров, а ради-
32 |
2.1. Последовательность анализа уравновешенности |
ус-вектор МCI на плоскость, перпендикулярную плоскости осей цилиндров. Определив ре-
ально действующие результирующие силы РI и моменты МI, принимаем решение о их уравновешивании и строим уравновешивающий механизм первого порядка для одноблочно-
го двигателя.
4)Составляются векторные диаграммы фиктивных сил инерции второго порядка
CII. Для этого необходимо удвоить углы, которые составляет каждый кривошип относитель-
но первого кривошипа, установленного в начальном положении ( = 0). Векторная диаграм-
ма сил CII может быть получена из диаграммы сил CI, если каждый вектор CI повернуть по направлению вращения относительно вектора CI первого цилиндра на удвоенный угол. Затем определяются результирующие векторы фиктивных сил CII и моментов МCII осуществля-
ется переход к реально действующим силам PII и моментам МII и принимаются меры по их уравновешиванию.
Для одноблочного двигателя на этом задача уравновешенности закончена. Если двига-
тель имеет сложную компоновочную схему с несколькими блоками и коленчатыми валами,
то анализ продолжается только по тем признакам, по которым оказался несамоуравновешен одноблочный модульный двигатель.
5) Выделяется поперечный модуль – плоский отсек - и строятся соответствующие векторные диаграммы сил Q, P, K и Z. Системы этих сил для всех плоских отсеков состав-
ляют динамически эквивалентные модели первого и второго порядков исходного разверну-
того двигателя. Используя известные свойства модульного плоского отсека, определяем ре-
зультирующие силы |
Q, |
P, K, |
Z и продольные моменты (величина и |
плоскость действия) |
этих сил MQ, MP, |
MZ, |
MK, |
принимаем решение о необходимости |
уравновешивания и |
разрабатываем схему уравновешивающего механизма.
При построении любых векторных диаграмм первый кривошип всегда устанавливает-
ся в начальное положение, соответствующее ( = 0 ) положительному направлению оси ор-
динат в плоскости поперечной симметрии двигателя.
6) Анализ выполняется для всех исходных вариантов. Окончательно выбирается тот вариант, который самоуравновешен по большему числу признаков или может быть уравно-
вешен наиболее простым способом без значительного усложнения конструкции двигателя.
При решении обратной или смешанной задачи уравновешенности обычно требуется обеспечить заданную самоуравновешенность по одному или нескольким признакам. В этом случае строятся векторные диаграммы сил, удовлетворяющие поставленным условиям. За-
тем, основываясь на свойствах рассматриваемых векторов, осуществляем переход от вектор-
ной диаграммы к соответствующей схеме расположения кривошипов коленчатого вала и на-
МОДУЛЬ 2. ПРАКТИЧЕСКИЕ ЗАДАЧИ УРАВНОВЕШЕННОСТИ (ОДНОВАЛЬНЫЕ ДВИГАТЕЛИ) 33
значаем все порядки работы цилиндров. Если исходной векторной диаграмме соответствует несколько схем коленчатого вала, то анализируются все схемы и выбирается оптимальная.
Возможные постановки задач и методология их решения рассматриваются дальше на кон-
кретных примерах, охватывающих практически все возможные случаи компоновки.
2.2. Однорядные двигатели
2.2.1. Одноцилиндровый одновальный двигатель
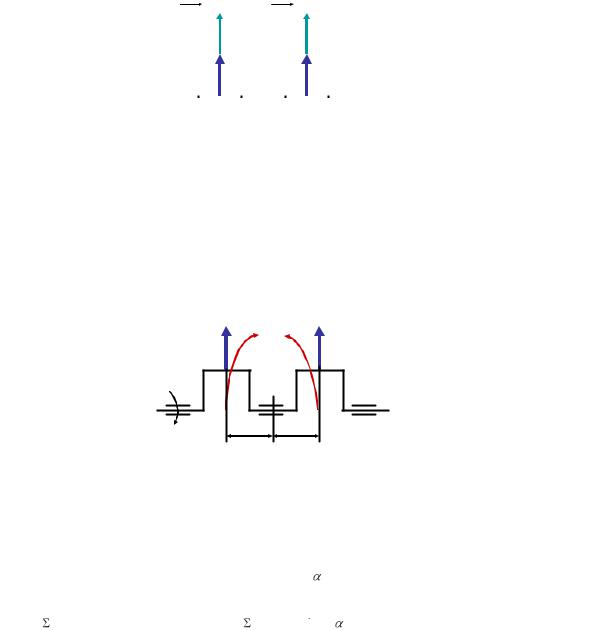
Одновальный одноцилиндровый двигатель не уравновешен по трем признакам: PR
0, PI 0 и PII 0, продольных моментов в двигателе нет, т.к. линии действия всех сил лежат в одной плоскости и пересекаются в одной точке – центре коренной шейки. Центро-
бежная сила инерции PR уравновешивается противовесами на щеках коленчатого вала. Сила инерции первого порядка PI уравновешивается двухвальным уравновешивающим механиз-
мом, валы которого расположены симметрично относительно продольной плоскости, прохо-
дящей через ось цилиндра и ось коленчатого вала, и вращаются в противоположных направ-
лениях с угловой скоростью . При положении кривошипа в ВМТ уравновешивающие грузы занимают крайнее нижнее положение. При повороте кривошипа и грузов на угол разви-
ваемая каждым грузом центробежная сила раскладывается на две составляющие. Горизон-
тальные составляющие уравновешиваются, а вертикальные, складываясь, образуют уравно-
вешивающую силу PI. Сила инерции второго порядка PII уравновешивается аналогичным уравновешивающим механизмом, в котором валы с грузами вращаются с удвоенной угловой скоростью (рис.2.1).
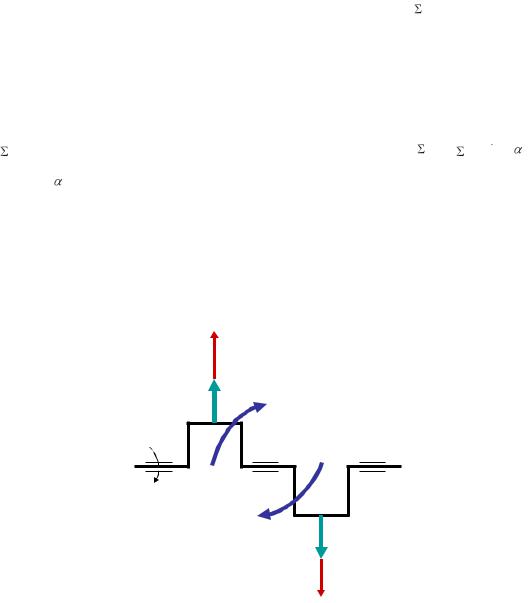
2.2.2. Одноцилиндровый двухвальный двигатель
Двухвальный одноцилиндровый двигатель с противоположно движущимися поршня-
ми (рис.2.2) является обязательным составным элементом двухтактных двигателей с ПДП любой компоновочной схемы.
Этот двигатель можно рассматривать как сочетание двух одновальных одноцилиндро-
вых двигателей с выпускным и впускным поршнями. Коленчатые валы этих двигателей раз-
вернуты друг относительно друга так, что выпускной поршень опережает впускной на угол
оп. Известно, что каждый из двигателей 1-цилиндровых двигателей неуравновешен по силам инерции ПДМ и НВМ. Очевидно, что при отсутствии фазового сдвига ( оп = 0) каждая из сил
PR , PI , PII одного двигателя уравновешивалась бы соответствующими силами другого двига-
теля, и двухвальный двигатель с ПДП был бы полностью самоуравновешен. Следовательно,
остаточная неуравновешенность полностью определяется величиной углового фазового смещения:
34 |
2.2.2. Одноцилиндровый двухвальный двигатель |
2ω |
ω |
РГ |
|
|
РВ |
2α |
|
РR
РI |
СI |
ω
α
CII
РII
Pпр
|
|
ω |
2ω |
|
|
|
|
РГ |
РГ |
|
РГ |
|
|
|
|
|
|
РВ |
|
Рв |
|
Рв |
|
|
|
|
|
|
|
|
2α |
α |
α |
|
Pур |
Рисунок 2.1 – Уравновешивание 1-цилиндрового ДВС
выпускной |
|
|
|
|
|
|
|
|
|
ω |
впускной |
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
ω |
|
|
|
ВМТ |
|
||||||||
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
CII |
|
CI РR |
|
|
|
|
|
|
φоп 2φоп |
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
CII |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
CI |
|
|
РR
Рисунок 2.2 – Динамически эквивалентная модель 1-цилиндрового двухвального дви-
гателя с ПДП
МОДУЛЬ 2. ПРАКТИЧЕСКИЕ ЗАДАЧИ УРАВНОВЕШЕННОСТИ (ОДНОВАЛЬНЫЕ ДВИГАТЕЛИ) 35
PR |
PR ВЫП. |
PR ВП . |
сos |
ОП ; |
PI |
PI ВЫП. |
PI ВП . |
сos |
ОП ; |
PII |
PII ВЫП. |
PII ВП . |
сos |
ОП . |
Поэтому величина оп назначается минимальной по условию обеспечения качествен-
ной очистки и наполнения цилиндра. По выполненным двигателям оп = 8 12 (cos оп = 0,98 0,99). Так как остаточная неуравновешенность невелика, специальных мер по уравно-
(cos оп = 0,98 0,99). Так как остаточная неуравновешенность невелика, специальных мер по уравно-
вешиванию не принимают.
2.2.3 Двухцилиндровый одновальный двигатель
2.2.3.1 Двухцилиндровый одновальный двигатель с кривошипами коленчатого вала,
направленными в одну сторону
Рассматриваем двигатель как сочетание двух одноцилиндровых двигателей с извест-
ными свойствами. Из векторных диаграмм действующих сил находим результирующие силы и моменты (рис.2.3):
PR ≠ 0, CI ≠ 0, следовательно, |
PI ≠ |
0, |
CII = 2CII ; CII ≠ 0, следовательно, |
PII |
0; |
MR = 0; MI = 0; MII = 0. |
|
|
Для уравновешивания двигателя по силам инерции |
первого и второго порядков тре- |
|
буется уравновешивающий механизм, аналогичный уравновешивающему механизму Ланче-
стера одноцилиндрового ДВС.
Уравновешивание центробежных сил инерции производится установкой противовесов на щеках коленчатого вала. При этом достигается дополнительная разгрузка коренных под-
шипников вала.
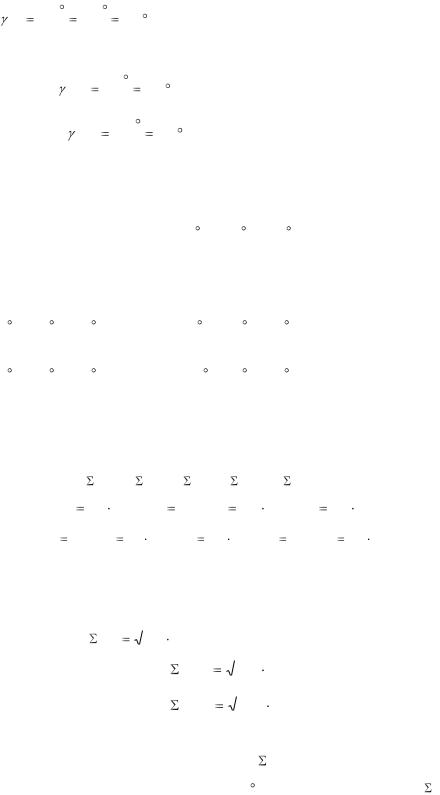
2.2.3.2 Двухцилиндровый одновальный двигатель с кривошипами коленчатого вала,
направленными под углом 180 о
Из векторных диаграмм действующих сил находим результирующие силы и моменты
(рис.2.4):
PR = 0, CI = 0, следовательно, PI = 0,
CII = 2CII ; PII 0; MR = PR lo; M CI = CI
lo; M CI = CI  lo ;
lo ;
MI 0; CII = 0, следовательно, MII = 0.
36 |
|
2.2.3.2 Двухцилиндровый одновальный двигатель с кривошипами |
|||||
|
|
|
|
коленчатого вала, направленными под углом 180 о |
|||
|
СI 1 |
|
CI 2 |
|
|
||
|
|
|
|
||||
|
РR1 |
|
РR2 |
|
|
||
|
|
|
|
|
|
|
|
ω
CII1 |
CII2 |
2ω |
|
МR 1 MR 2
РR1 |
РR2 |
ω
аа
Рисунок 2.3 – К анализу уравновешенности двухцилиндрового рядного ДВС с криво-
шипами, направленными в одну сторону
При повороте кривошипа на произвольный угол результирующая неуравновешенная
сила инерции второго порядка находится как проекция результирующего вектора второго порядка CII на плоскость осей цилиндров: PII = 2 CII cos2 .
Таким образом, результирующая сила инерции второго порядка равна удвоенной силе
PII, действующей в каждом цилиндре, и приложена к средней коренной шейке вала. Действуя в плоскости осей цилиндров, эта сила стремится то прижать двигатель к фундаменту, то ото-
рвать его от фундамента. Для уравновешивания двигателя по силам инерции второго поряд-
ка требуется двухвальный уравновешивающий механизм с грузами в плоскостях каждого цилиндра.
МОДУЛЬ 2. ПРАКТИЧЕСКИЕ ЗАДАЧИ УРАВНОВЕШЕННОСТИ (ОДНОВАЛЬНЫЕ ДВИГАТЕЛИ) 37
Уравновешивание продольного момента от центробежных сил MR возможно уста-
новкой противовесов на щеках коленчатого вала (при этом достигается дополнительная раз-
грузка коренных подшипников вала) или дисбалансом в маховике и выносным противовесом на противоположном конце вала.
Для произвольного положения кривошипа вектор результирующего момента реальных сил инерции первого порядка находится как проекция вектора момента фиктивных сил
M C |
на плоскость, перпендикулярную плоскости осей цилиндров, т.е. MI = |
M C |
cos = |
|
I |
|
I |
CI  lo
lo cos . Уравновешивание этого момента достигается установкой двухвального уравно-
cos . Уравновешивание этого момента достигается установкой двухвального уравно-
вешивающего механизма.
Так как полное уравновешивание двигателя приводит к значительному усложнению конструкции, увеличению габаритных размеров и массы двигателя, на практике его оставля-
ют не уравновешенным по некоторым признакам, принимая соответствующие меры для га-
шения возникающих вибраций.
РR1
(CI1) РI1
МI1, МR1
ω
МI2, МR2 |
(CI2) Pi2
РR2
Рисунок 2.4– К анализу уравновешенности двухцилиндрового рядного ДВС с криво-
шипами, направленными под углом 180о
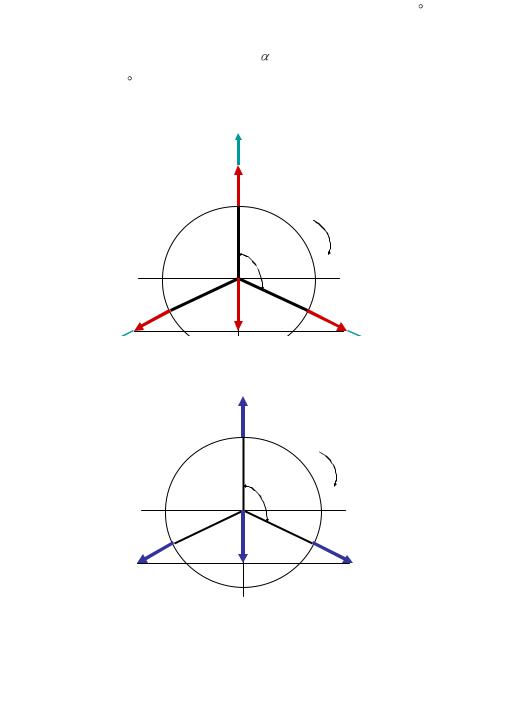
2.2.4. Трехцилиндровый одновальный двигатель
Независимо от тактности двигателя схема коленчатого вала может быть только равно-
мерной продольно-несимметричной (лучевой). Угол между кривошипами для лучевой схе-
38 2.2.4. Трехцилиндровый одновальный двигатель
мы равен: |
|
|
360 |
|
|
|
360 |
|
|
|
|
120 . |
|
|
|
По условию равномерности выходного крутящего |
||||||||||||||||||||||||||||||||||||||||||||||||
КР |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
iбл |
|
|
|
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
момента определяется угол между последовательными вспышками в цилиндрах: |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
720 |
|
240 |
|
для четырехтактного двигателя; |
|
|
|||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
ВСП |
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
360 |
|
|
120 |
|
для двухтактного двигателя |
|
|
|
|||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
ВСП |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Порядок работы цилиндров двухтактного двигателя |
|
|
при выбранной схеме вала воз- |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
можен только один: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
120 |
|
|
|
|
120 |
|
|
|
|
|
|
|
|
|
120 |
|
|
|
|
|
|
|
|
||||||||||||
В четырехтактном двигателе при той же схеме вала возможны несколько вариантов |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
порядка работы цилиндров: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
1 |
|
|
3 |
|
|
|
2 |
|
|
|
1 |
|
(1) |
|
|
|
|
1 |
|
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
1 |
(2) |
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||
120 |
|
|
120 |
|
|
|
|
|
480 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
120 |
|
|
|
|
480 |
|
|
|
|
|
|
|
|
120 |
|
|
|
|
|
|
|
|
||||||||||||||||||
1 |
|
|
|
3 |
|
|
|
2 |
|
|
|
1 |
|
(3) |
|
|
|
1 |
|
|
|
|
|
|
2 |
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|
|
|
1 |
(4) , |
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||
480 |
|
|
120 |
|
|
|
|
|
120 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
240 |
|
|
|
240 |
|
|
|
|
|
|
|
|
240 |
|
|
|
|
|
|
|
|
|||||||||||||||||
из которых условию равномерного чередования вспышек удовлетворяет только 4-й |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
вариант. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Из анализа векторных диаграмм следует, что |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
PR = 0; |
|
CI = 0; |
PI = 0; |
|
|
CII = 0; |
|
|
PII = 0; |
|
|
|
|
|||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
M |
R1 |
|
P |
|
|
l |
o |
; M |
R2 |
|
0; M |
R3 |
|
|
|
P |
|
|
|
|
|
l |
o |
; M |
C1 |
C |
I1 |
l |
o |
; |
|||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
R1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
R3 |
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||
|
|
|
|
|
M |
CI2 |
|
|
0; M |
|
|
C |
|
l |
; M |
CII1 |
|
|
|
C |
|
|
l |
; M |
|
|
|
|
|
0; M |
CII3 |
C |
|
|
l . |
|||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
CI3 |
|
|
|
|
|
I3 |
o |
|
|
|
|
|
|
|
|
|
II 1 |
|
o |
|
|
|
|
|
|
|
|
|
|
CII |
|
|
|
|
|
|
|
II |
3 o |
|||||||||||
Произведя попарно геометрическое сложение векторов этих моментов, находим вели- |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
чину и направление векторов результирующих моментов: |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||
центробежных сил M |
|
|
|
|
|
|
|
|
|
|
|
; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
R |
|
|
|
3P l |
o |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
R |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
фиктивных сил первого порядка |
|
M |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
l |
|
; |
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||
|
C |
I |
|
|
|
|
3C |
I |
|
o |
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
фиктивных сил второго порядка |
|
M |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
l |
|
. |
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||
|
C |
II |
|
|
|
|
|
3C |
II |
|
|
o |
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
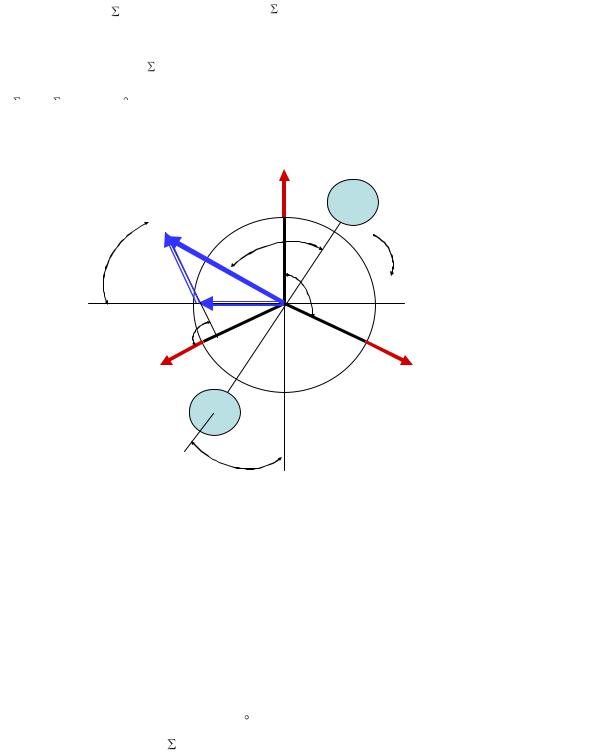
|||
Вектор суммарного момента центробежных сил |
|
|
|
|
M R |
направлен противоположно вто- |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
рому кривошипу и составляет с горизонталью угол 30 . Следовательно, сам момент MR дей-
МОДУЛЬ 2. ПРАКТИЧЕСКИЕ ЗАДАЧИ УРАВНОВЕШЕННОСТИ (ОДНОВАЛЬНЫЕ ДВИГАТЕЛИ) 39
ствует в перпендикулярной плоскости, составляющей с вертикалью угол 30 . Уравновешива-
ется этот момент выносными противовесами (или соответствующими дисбалансами) на кон-
цах коленчатого вала. В начальном положении ( = 0о) противовесы повернуты по направле-
нию вращения на угол 30 .
РR1
CI1 (PI1)
1 |
ω |
|
1200
|
3 |
2 |
CI3 |
PI2,3 |
CI2 |
|
Р |
R3 |
РR2 |
|
|
|
CII 1 (PII 1) |
|
|
1 |
ω |
|
|
|
|
1200 |
|
3 |
2 |
|
|
PII 2,3 |
|
CII 2 |
|
CII 3 |
Рисунок 2.5 – К анализу уравновешенности трехцилиндрового одновального двигателя
40 2.2.4. Трехцилиндровый одновальный двигатель
Направление вектора и плоскость действия суммарного момента фиктивных сил инерции
первого порядка |
идентичны моменту MR. Величина и направление результирующего |
|
MCI |
момента первого порядка, реально действующего в плоскости осей цилиндров, определится
как проекция вектора |
|
на плоскость, перпендикулярную плоскости осей цилиндров: |
|
|
|
|
M CI |
M I |
M C cos30 |
3 |
CI lo . |
|
I |
2 |
|
|
|
|
|
(противовес)
 ∑MR
∑MR
300
PR1
90о 1 |
ω |
|
MR3 |
M |
1200 |
|
R1 |
|
900 |
|
|
|
3 |
2 |
PR3 |
|
PR2 |
(противовес) |
|
|
|
300 |
|
Рисунок 2.6 – Уравновешивание момента от центробежных сил трехцилиндрового од-
новального двигателя
Уравновешивается продольный момент от сил инерции первого порядка двухвальным уравновешивающим механизмом, грузы которого в начальном положении повернуты по на-
правлению вращения валов на угол 30 . Результирующий вектор суммарного фиктивного
момента второго порядка M |
CII |
направлен по вектору С |
и составляет с горизонталью |
|
|
II2 |