

В.А. Синицын
.pdfМОДУЛЬ 1. ОСНОВЫ ВЕКТОРНОГО АНАЛИЗА УРАВНОВЕШЕННОСТИ ДВС |
21 |
1) = 0 о |
|
|
2) = 180 о |
|
|||
|
|
|
|
3) 0°<γ<90° |
о |
3) 0 о < < 90 |
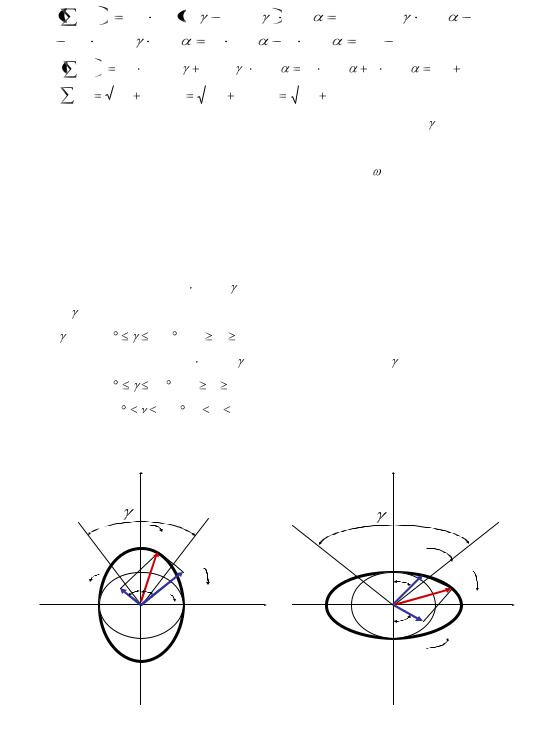
5) 0°<γ<180°
5) 90 о < < 180 о
4)γ=90° = 90 о
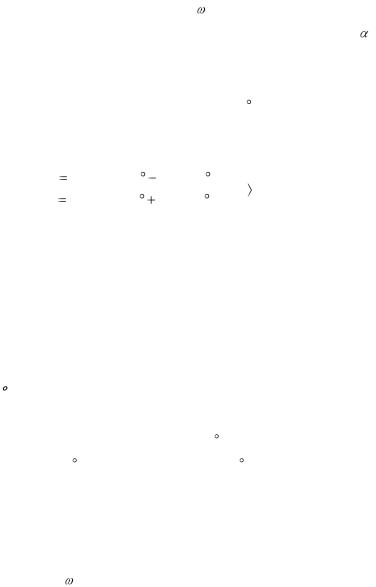
Рисунок 1.10 – Частные случаи годографов сил инерции первого порядка плоского отсека 2V γбл
При = 0 F = P = CI, RI = ± 2CI, B |
= 2CI, A = 0, годограф – прямая линия вдоль |
I |
I |
оси У длиной от – 2CI до + 2CI. Для уравновешивания вектора P требуется одновальный уравновешивающий механизм. На основании рассмотренных свойств векторов F и Р может быть составлена динамически эквивалентная модель первого порядка (ДЭМ I) для любого V - образного двигателя.
Для вывода динамически эквивалентной модели отсека 2V по силам инерции второ-
по силам инерции второ-
го порядка обратимся вновь к рис. 1.7. Положение фиктивных векторов СII определяется на основании их свойств, т.е. вектор каждого цилиндра должен быть повернут по направлению вращения кривошипа относительно нулевого положения этого цилиндра на удвоенный угол между кривошипом и осью соответствующего цилиндра. Напомним, что за нулевое положе-
ние цилиндра принимается положение кривошипа в ВМТ. На схеме рис. 1.7 углы между кри-

22 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1.3.1. Отсек 2Vγ . |
вошипом и осями левого и правого |
цилиндров равны соответственно ( |
+0,5 ) и [360 – |
||||||||||||||||||||
(0,5 − )]. Удваивая эти углы, находим, что вектор СII л |
должен быть повернут относительно |
|||||||||||||||||||||
оси левого цилиндра на угол 2( |
|
+ 0,5 ) = |
+2 |
, а вектор СII П надо повернуть относительно |
||||||||||||||||||
оси правого цилиндра на угол 2[360 |
− (0,5 |
- |
)] = 360 |
– ( |
– 2 |
). Находим величину и на- |
||||||||||||||||
правление реальных сил инерции второго порядка как проекции фиктивных сил СII Л и СII П |
||||||||||||||||||||||
на оси цилиндров: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
PII Л |
CII Л |
cos 180 |
2 |
|
|
|
|
CII Л |
cos 2 |
; |
|||||||||||
|
|
PII П |
CII |
П |
cos |
|
2 |
|
CII |
П |
cos 2 |
. |
|
|||||||||
В дальнейшем индексы «л» и «п» при СII |
можно опустить. Составляем и преобразуем |
|||||||||||||||||||||
сумму проекций этих сил на координатные оси: |
|
|
|
|
|
|
|
|
|
|||||||||||||
PII |
X |
PII П |
cos 90 |
0,5 |
|
PII Л |
cos 90 |
0,5 |
|
PII П sin 0,5 |
||||||||||||
PII Л |
sin 0,5 |
CII |
cos 2 |
|
|
|
|
sin 0,5 |
CII cos 2 |
sin 0,5 |
||||||||||||
CII |
sin 0.5 |
|
cos 2 |
|
|
|
cos 2 |
|
|
CII |
sin 0.5 |
|
|
|||||||||
2sin 2 |
sin |
CII |
cos0,5 |
cos1,5 |
sin 2 |
AII sin 2 . |
|
|||||||||||||||
PII |
У |
PII |
П |
cos0,5 |
|
PII Л |
cos0,5 |
CII |
cos 2 |
cos0,5 |
||||||||||||
CII |
cos 2 |
|
|
cos0,5 |
|
CII |
|
|
cos0,5 cos 2 |
|
|
cos 2 |
|
|||||||||
CII |
cos0,5 |
2 cos2 |
cos |
|
CII |
cos0,5 |
|
cos1,5 |
cos2 |
|
||||||||||||
BII cos2 . |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Результирующая сила инерции второго порядка: |
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
PII |
|
|
|
PII |
2 |
|
|
PII |
2 |
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
X |
|
|
Y . |
|
|
||||||
Вектор результирующей силы R |
II |
|
|
|
X 2 |
|
Y 2 . |
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Угловое положение результирующего вектора: tg
Таким образом, силы инерции второго порядка, действующие вдоль осей цилиндра от-
сека 2V , приводятся к равнодействующей силе PII, радиус-вектор которой RII вращается в плоскости осей цилиндров с постоянной угловой скоростью 2 . Годограф результирующего
вектора в общем случае представляет собой эллипс, длина полуосей которого зависит от угла между цилиндрами :
AII ( X ) CII cos0,5 cos1,5
cos1,5 ; BII (Y ) CII cos0,5
; BII (Y ) CII cos0,5 cos1,5
cos1,5 .
.
Продолжим преобразования в следующем виде:
МОДУЛЬ 1. ОСНОВЫ ВЕКТОРНОГО АНАЛИЗА УРАВНОВЕШЕННОСТИ ДВС |
23 |
PII |
X |
CII cos 0,5 |
|
cos1,5 |
sin 2 |
CII |
cos0,5 sin 2 |
||||||||
CII |
cos1,5 |
sin 2 |
|
K sin 2 |
Z sin 2 |
K X |
Z X . |
|
|||||||
PII |
Y |
CII |
(cos0,5 |
cos1,5 |
) |
cos 2 |
|
K |
cos 2 |
z cos 2 |
KY ZY ; |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
P |
|
K 2 |
Z 2 ; K |
|
K 2 |
K 2 |
; Z |
|
Z 2 |
Z 2 . |
|
|
|
||
II |
|
|
|
|
|
X |
Y |
|
|
X |
Y |
|
|
|
|
Отсюда следует, что динамически эквивалентная модель отсека 2V |
по силам инер- |
||||||||||||||
ции второго порядка (ДЭМ II) представляет собой систему двух векторов К и Z, вращающих- |
|||||||||||||||
ся в плоскости осей цилиндров с удвоенной угловой скоростью 2 |
. Результирующий вектор |
||||||||||||||
RII равен их геометрической сумме и вращается в сторону большего вектора. Проекции ре-
альных сил инерции PII |
на координатные оси представляют собой сумму проекций сил К и Z |
||||
на эти оси. |
|
|
|
|
|
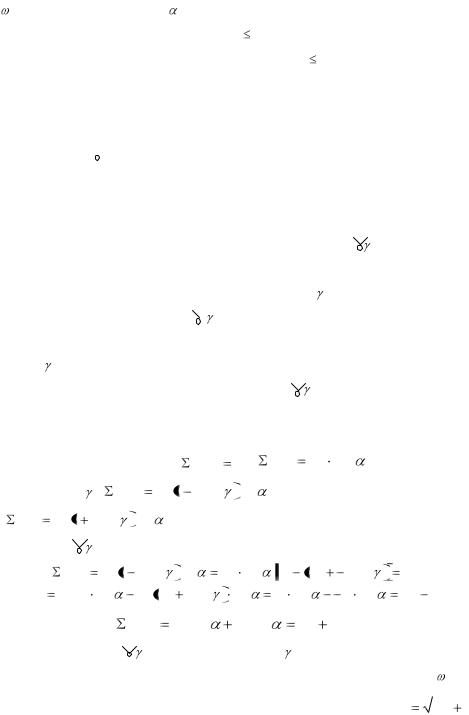
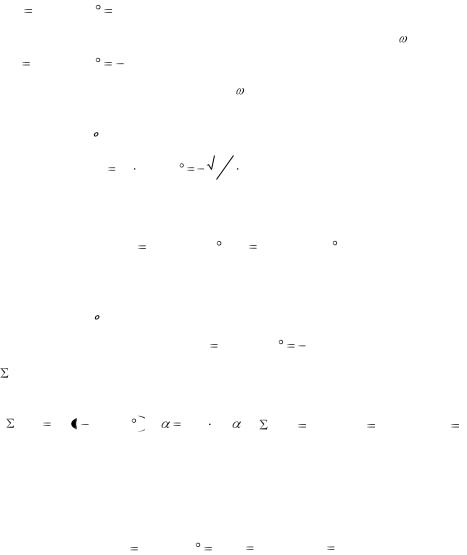
Рассмотрим свойства ДЭМ II V– образного отсека: |
|||||
1) Радиус-вектор K = CII cos0,5 |
|
имеет постоянную величину только при фиксиро- |
|||
ванном |
, в общем случае его величина определяется численным значением функции |
||||
cos0,5 : |
при 0 |
180 , СII |
К |
|
0. |
2) Радиус-вектор Z = CII |
cos1,5 |
в зависимости от угла принимает следующие |
|||
значения: при 0 |
60 , СII |
Z |
0; |
||
|
при 60 |
120 , 0 Z СII ; |
|||
|
при 120 |
180 , СII |
Z |
0. |
|
у
Л |
2ω |
П |
RII
2ω |
|
|
2ω |
Z |
2α |
2α |
К |
|
|||
|
2α ω |
х |
|
|
|
у |
|
|
Л |
|
П |
|
|
|
|
2ω |
|
2α |
К |
|
|
|
|
|
RII |
2ω |
|
|
х |
2α |
|
|
|
Z |
|
|
2ω |
|
Рисунок 1.11 – ДЭМ II отсека 2V γбл при различных углах между блоками
При равенстве одного из векторов нулю, годограф результирующего вектора – окруж-
ность.
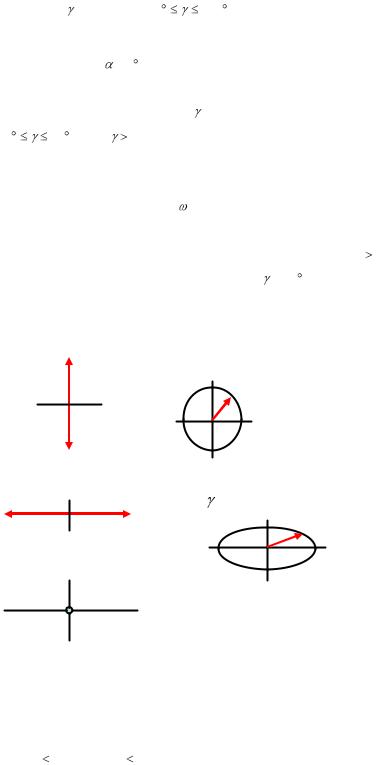
24 1.3.1. Отсек 2Vγ .
3) Знак функции cos 0,5 в диапазоне 0 |
180 положителен, следовательно, век- |
||
тор K вращается по направлению вращения вектора |
C |
, т.е. в том же направлении, что и |
|
|
|
|
II |
кривошип. В начальном положении ( = 0 ) вектор K направлен по кривошипу. |
|||
4) Направление вращения вектора Z и его положение относительно вектора K и коор- |
|||
динатных осей определяются знаком функции cos1.5 . |
|
||
В диапазоне 0 |
60 , cos1,5 0, проекции вектора на ось Х (КХ, ZХ) имеют разные |
||
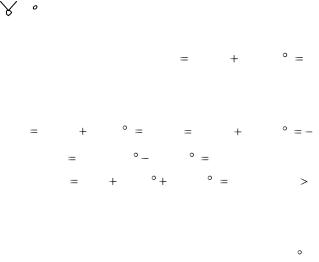
знаки, а на ось У (КУ, ZУ) – одинаковые. Следовательно, для любого положения кривошипа векторы K и Z расположены симметрично оси ординат и вращаются в противоположных направлениях с одинаковой угловой скоростью 2 . В начальном положении оба вектора на-
правлены по кривошипу и совпадают с положительным направлением оси ординат. Эллип-
тический годограф результирующего вектора RII вытянут вдоль оси ординат (BII |
AII). Вра- |
щается вектор RII в сторону вектора K, т.к. K > Z (рис.1.12). При = 60 Z = 0, AII |
= BII , годо- |
граф RII − окружность радиуса К. |
|
1)  = 0 о 2)
= 0 о 2)  = 60 о
= 60 о
3)  = 90 о
= 90 о
4) = 120 о
5)  = 180 о
= 180 о
Рисунок 1.12 – Частные случаи годографов сил инерции второго порядка плоского отсека 2V γбл
В диапазоне 60
 180
180 cos1,5
cos1,5 0 и проекции векторов на ось Х имеют одинаковые знаки, а на ось У − разные. Следовательно, при любом
0 и проекции векторов на ось Х имеют одинаковые знаки, а на ось У − разные. Следовательно, при любом  векторы K и Z расположены сим-
векторы K и Z расположены сим-
МОДУЛЬ 1. ОСНОВЫ ВЕКТОРНОГО АНАЛИЗА УРАВНОВЕШЕННОСТИ ДВС |
25 |
метрично оси Х и вращаются в противоположных направлениях с одинаковой угловой скоро-
стью 2 . В начальном положении ( = 0) вектор K направлен по кривошипу, а вектор Z - в
противоположную сторону. В диапазоне 60
 90
90 K > Z , поэтому результирующий век-
K > Z , поэтому результирующий век-
тор RII вращается в сторону вектора K. В диапазоне 90
 180
180 Z > K и результирующий вектор вращается в сторону вектора Z. Уравновешивание векторов K и Z возможно специ-
Z > K и результирующий вектор вращается в сторону вектора Z. Уравновешивание векторов K и Z возможно специ-
альным двухвальным уравновешивающим механизмом.
1.3.2. Отсек 3 

Вывод динамически эквивалентных моделей по силам инерции ПДМ первого и второ-
го порядка трехцилиндрового отсека можно значительно упростить, если воспользоваться
уже известными моделями элементарных отсеков. Для этого отсек 3 |
|
будем рассматривать |
|
как сочетание двух отсеков с общим коленчатым валом: одноцилиндрового отсека и двухци-
линдрового V− образного отсека с углом развала цилиндров 2 .
Вывод ДЭМ I и ДЭМ II отсека 3 |
|
выполняется в следующей последовательности: |
|
записываются известные уравнения суммы проекций сил инерции для составляющих отсеков рядного и 2V2 , алгебраическим сложением соответствующих уравнений находится выраже-
ние для суммы проекций сил инерции исходного отсека 3 |
|
, которое затем в результате пре- |
||||||||||||||||
|
||||||||||||||||||
образований приводится к виду динамически эквивалентной модели. |
|
|
|
|||||||||||||||
По силам инерции первого порядка: |
|
|
|
|
|
|
|
|
|
|||||||||
для одноцилиндрового отсека ( |
P ) |
|
0 , ( |
PI )Y |
|
CI |
cos ; |
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
I X |
|
|
|
|
|
|
|
|
|
для отсека 2V2 |
( PI )X |
CI |
1 |
cos2 |
sin |
, |
|
|
|
|
|
|
||||||
( PI )Y CI 1 |
cos2 |
|
cos |
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
для отсека. 3 |
|
|
, |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
( PI )X |
CI |
1 |
|
cos2 |
sin |
CI |
sin |
1,5 |
0,5 |
cos2 |
|
|
|
|||||
1,5CI |
sin |
|
|
CI |
0,5 |
|
cos2 |
sin |
F sin |
P sin |
FX |
PX . |
||||||
|
|
|
( |
P ) |
|
F cos |
|
P cos |
|
F |
P . |
|
|
|
||||
|
|
|
|
|
|
II Y |
|
|
|
|
|
|
|
Y |
Y |
|
|
|
|
|
|||||||||||||||||
Итак, ДЭМ I отсека 3 |
|
, так же, как и отсека 2V |
, представляет собой систему двух |
|||||||||||||||
|
||||||||||||||||||
векторов F и Р, вращающихся в плоскости осей цилиндров с угловой скоростью |
в проти- |
|||||||||||||||||
|
|
|
|
|
|
|
|
|||||||||||
воположных направлениях. Годограф результирующего радиус-вектора |
R |
F 2 P2 в |
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
I |
|
|
общем случае – эллипс, длина полуосей которого равна: |
|
|
|
|
|
|
||||||||||||
26 |
Отсек 3 γ |
AI ( X ) CI |
1,5 0,5 cos2 ; BI (Y ) CI 0,5 cos2 |
1,5 . |
Вектор F = 1,5CI направлен по кривошипу и вращается в ту же сторону. Величина век- |
||
тора P CI 0,5 cos2 |
зависит от угла , а положение относительно координатных осей |
|
определяется знаком функции (0,5 + cos2 ). При равенстве нулю вектора P годограф резуль-
тирующего вектора RI |
становится окружностью радиуса F. Условие P = 0 выполняется при |
|||
0,5 + cos2 = 0, т.е. при |
1 = 60 (отсек 3 |
|
60о) . |
|
|
||||
|
||||
В этих отсеках силы инерции ПДМ первого порядка и центробежные силы инерции |
||||
приводятся к результирующему радиус-вектору: |
||||
|
|
|
|
|
|
Q |
F |
|
PR 1,5CI PR , |
постоянному по величине и направлению.
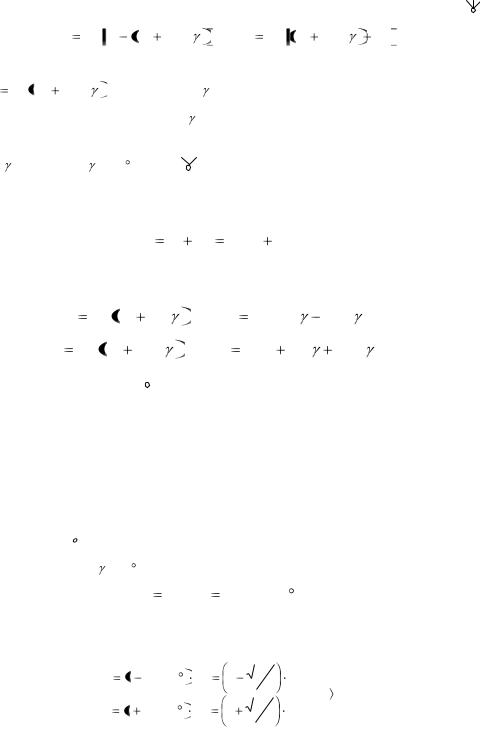
Параметры ДЭМ II определяются из выражений:
K |
CII 0,5 |
cos |
; |
AII ( X ) |
CII (cos |
cos3 ); |
Z |
CII 0,5 |
cos3 |
; |
BII (Y ) |
CII (1 cos |
cos3 ); |
Свойства ДЭМ II отсека 3 
 аналогичны свойствам ДЭМ II двухцилиндрового V −
аналогичны свойствам ДЭМ II двухцилиндрового V −
образного отсека.
1.4. Динамические свойства плоских отсеков
1.4.1. Двухцилиндровые отсеки
Отсек 2 V 45 . Анализируем динамически эквивалентную модель первого порядка,
подставляя значения угла = 45 :
F CI ; P CI  cos45 .
cos45 .
По силам инерции первого порядка отсек не самоуравновешен. Длина полуосей эл-
липтического годографа результирующего радиус-вектора RI равна:
AI ( X ) |
1 |
cos45 |
CI |
1 |
2 |
2 |
CI |
; |
|
|
|||||||||
|
|
|
|
|
|
|
BI AI . |
||
|
|
|
|
|
|
|
|
||
|
|
|
|
|
2 |
|
|
||
BI (Y ) |
1 |
cos45 |
CI |
1 |
2 |
CI |
; |
||
|
|||||||||
|
|
|
|
|
|
|
|
Векторы F и P симметричны относительно оси ординат, эллипс вытянут вдоль оси У.
Для уравновешивания векторов F и P необходимы уравновешивающие механизмы, которые строятся на основании свойств векторов. Оба вектора имеют постоянную величину, враща-
ются в плоскости осей цилиндров с одинаковой угловой скоростью в противоположных на-
МОДУЛЬ 1. ОСНОВЫ ВЕКТОРНОГО АНАЛИЗА УРАВНОВЕШЕННОСТИ ДВС |
27 |
правлениях. Так как свойства векторов F и PR одинаковы, то уравновешивается суммарная сила Q = F + PR установкой противовеса на щеках коленчатого вала. Поскольку направление вращения вектора P противоположно, то для его уравновешивания использовать коленчатый вал нельзя. Дополнительный вал уравновешивающего механизма первого порядка располага-
ется параллельно оси коленчатого вала и вращается в направлении, противоположном вра-
щению коленчатого вала с той же угловой скоростью . Уравновешивающий груз располо-
жен в плоскости осей цилиндров так, чтобы в нулевом положении кривошипа ( = 0) он занимал крайнее нижнее положение.
Анализируем динамически эквивалентную модель второго порядка: 



 cos67,5 .
cos67,5 .
Так как векторы K и Z не равны нулю, то отсек по силам инерции второго порядка не
самоуравновешен и результирующий вектор имеет эллиптический годограф с полуосями:
AII ( X ) |
CII (cos22,5 |
cos67,5 ); |
BII |
AII |
|
BII (Y ) |
CII (cos22,5 |
cos67,5 ); |
|||
|
|
Векторы K и Z симметричны относительно оси У и эллипс вытянут вдоль этой оси.
Уравновешивающий механизм состоит из двух дополнительных валов, вращающихся с удво-
енной угловой скоростью 2 в противоположных направлениях. Уравновешивающие грузы создают центробежные силы, равные соответственно силам К и Z, и расположены так, чтобы в нулевом положении кривошипа они занимали крайнее нижнее положение. Уравновеши-
в противоположных направлениях. Уравновешивающие грузы создают центробежные силы, равные соответственно силам К и Z, и расположены так, чтобы в нулевом положении кривошипа они занимали крайнее нижнее положение. Уравновеши-
вающий вал вектора K вращается в направлении вращения коленчатого вала.
Отсек 2 V 60 . На основании динамически эквивалентной модели первого порядка имеем:
F = CI; Q =F+ PR; |
P = CI cos60 = 0,5CI; |
AI(X) = (1−cos60 )CI = 0.5CI; |
BI(Y) = (1+cos60 )CI = 1,5CI. |
Отсек не самоуравновешен по силам инерции первого порядка. Эллиптический годо-
граф результирующего вектора RI вытянут вдоль оси У. Суммарная сила Q уравновешивает-
ся противовесами на щеках коленчатого вала. Уравновешивающий механизм силы Р состоит из дополнительного вала с грузом, вращающегося в направлении против вращения коленча-
того вала с угловой скоростью . В нулевом положении кривошипа груз занимает крайнее нижнее положение.
По силам инерции второго порядка:

28 1.4.1. Двухцилиндровые отсеки
K C cos30 |
3 |
2 |
C ; Z |
C cos90 0 . |
II |
|
II |
II |
|
|
|
Годограф результирующего вектора RII − окружность радиуса К. Вектор K уравнове-
шивается одновальным механизмом, вал которого вращается с удвоенной скоростью 2 в
в
направлении вращения кривошипа. В нулевом положении вектор K направлен по кривоши-
пу, следовательно, уравновешивающий груз должен занимать крайнее нижнее положение.
Из анализа отсека 2 V 60 следует, что в V - образном двигателе с углом развала бло-
следует, что в V - образном двигателе с углом развала бло-
ков 60 при любом числе цилиндров и любой схеме коленчатого вала продольный момент
при любом числе цилиндров и любой схеме коленчатого вала продольный момент
МII может быть уравновешен упрощенным одновальным механизмом.
Отсек 2 V 90 |
|
|
. По силам инерции первого порядка: |
|
|
|
|||||||||||||
|
|
|
|
|
F = CI; Q =F+ PR; |
|
P = CI cos90 = 0; |
|
|
|
|||||||||
годограф RI - окружность радиуса F. Сила Q уравновешивается противовесами на ще- |
|||||||||||||||||||
ках коленчатого вала. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
По силам инерции второго порядка: |
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
K |
|
CII cos45 |
2 |
|
CII ; |
Z |
C |
cos135 |
2 |
|
CII ; |
||||||
|
|
|
2 |
|
2 |
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
II |
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
cos135 ) 0 . |
||||
|
A |
C |
II |
(cos45 cos135 ) |
|
2C |
II |
; B |
C |
II |
(cos45 |
|
|||||||
|
II ( X ) |
|
|
|
|
|
|
|
|
II (Y ) |
|
|
|
|
|
||||
Годограф результирующего вектора второго порядка – прямая линия вдоль оси Х длиной от ( 
 2CII ) до (–
2CII ) до (– 
 2CII ). Для уравновешивания требуется двухвальный механизм.
2CII ). Для уравновешивания требуется двухвальный механизм.
Из анализа следует, что развернутый двигатель с бл = 90 при любом числе цилиндров и лю-
при любом числе цилиндров и лю-
бой схеме коленчатого вала легко уравновешивается противовесами на коленчатом валу по центробежным силам, силам инерции первого порядка и продольным моментам этих сил.
Следовательно, при выборе числа цилиндров в блоке и схемы коленчатого вала можно осно-
вываться только на получении максимальной самоуравновешенности двигателя по силам и моментам второго порядка.
. По силам инерции первого порядка:
F = CI; Q =F+ PR – противовесы на коленчатом валу;
P C |
I |
cos120 |
0,5C |
I |
– противовесы на дополнительном валике. |
|
|
|
|
По силам инерции второго порядка:
МОДУЛЬ 1. ОСНОВЫ ВЕКТОРНОГО АНАЛИЗА УРАВНОВЕШЕННОСТИ ДВС |
29 |
|||||||
|
K |
CII cos60 |
0,5CII – противовесы на дополнительном валике, вращающемся в |
|||||
направлении вращения коленчатого вала с удвоенной угловой скоростью 2 |
; |
|||||||
|
Z |
CII cos180 |
CII – противовесы на дополнительном валу, вращающемся в про- |
|||||
тивоположную сторону с угловой скоростью 2 . |
|
|||||||
|
Отсек 2 V 135 |
Вектор Q =F+ PR уравновешивается противовесами на щеках колен- |
||||||
|
|
|
|
|
|
|
|
|
чатого вала. Вектор Р |
CI cos 135 |
2 |
2 |
CII уравновешивается одновальным механиз- |
||||
|
||||||||
|
|
|
|
|
|
|
|
|
мом. Для уравновешивания векторов второго порядка:
|
|
K |
CII cos67,5 ; |
Z |
CII cos202,5 |
– |
|
|
|
|
|
||||
требуется полный двухвальный уравновешивающий механизм. |
|
|
|
|
|
|
|
||||||||
|
Отсек 2 V 180 |
В оппозитном отсеке вектор Q =F+ PR |
уравновешивается противо- |
||||||||||||
весами на коленчатом валу. |
Вектор |
Р |
CI |
cos180 |
CII . |
Определим результирующую |
|||||||||
силу |
P и форму годографа вектора RI , |
для чего найдем сумму проекций действующих сил |
|||||||||||||
|
I |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
на координатные оси и длину полуосей эллипса: |
|
|
|
|
|
|
|
|
|
||||||
( |
PI ) X CI 1 cos180 |
sin |
2CI |
sin |
; ( |
P ) |
0; |
A |
|
2C |
I |
; B |
I ( Y ) |
0 . |
|
|
|
|
|
|
|
|
I Y |
|
I ( X ) |
|
|
|
|||
Результирующая сила инерции первого порядка равна удвоенной силе PI, действую-
щей в каждом цилиндре. Годограф результирующего вектора – общая линия осей цилиндров,
совпадающая с осью абсцисс.
По силам инерции ПДМ второго порядка:
0 ; Z CII cos 270 0 –
0 –
оппозитный отсек полностью самоуравновешен. Следовательно, развернутый оппозитный двигатель с любым числом цилиндров и при любой схеме коленчатого вала будет самоурав-
новешен по силам инерции ПДМ второго порядка и продольным моментам от этих сил. По-
этому выбор схемы коленчатого вала можно подчинить условию получения максимальной самоуравновешенности по силам и моментам первого порядка. Этот вывод справедлив и для любого многоблочного многовального двигателя, который условно можно разбить на оппо-
зитные двухцилиндровые отсеки.
30 |
|
|
|
|
|
|
|
|
|
|
|
|
|
1.4.2. Трехцилиндровые отсеки |
|||
1.4.2. Трехцилиндровые отсеки |
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
По силам инерции первого порядка отсек уравновешивается противо- |
|||||||||||||||
|
Отсек 3 |
|
60 |
||||||||||||||
|
|
||||||||||||||||
весами на щеках коленчатого вала, так как |
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
F =1,5CI; Q =F+ PR; P |
CI (0,5 |
cos120 ) |
0 ; |
|
|
||||||||
годограф результирующего радиус-вектора RI |
– окружность радиуса F. По силам инерции |
||||||||||||||||
второго порядка силы К и Z не равны нулю: |
|
|
|
|
|
|
|
||||||||||
|
|
|
K |
C |
II |
(0,5 |
cos60 ) |
C |
|
; Z |
C |
II |
(0,5 |
cos180 ) |
0,5C |
II |
; |
|
|
|
|
|
|
|
|
II |
|
|
|
|
|
||||
|
|
|
|
AII ( X ) |
CII (cos60 |
cos180 ) 1,5CI ; |
|
|
|
||||||||
|
|
|
|
BII (Y ) |
CII (1 cos60 |
|
cos180 ) 0,5CI ; AII |
BII . |
|
|
|||||||
Эллиптический годограф результирующего радиус-вектора вытянут вдоль оси Х. Для его уравновешивания требуется двухвальный уравновешивающий механизм второго поряд-
ка. Таким образом, любой двигатель, состоящий из отсеков 3 60 , легко уравновешивается по силам и моментам первого порядка противовесами на коленчатом валу. Следовательно,
60 , легко уравновешивается по силам и моментам первого порядка противовесами на коленчатом валу. Следовательно,
при выборе схемы коленчатого вала такого двигателя надо исходить из максимальной само-
уравновешенности по силам и моментам второго порядка.