

В.А. Синицын
.pdfМОДУЛЬ 2. ПРАКТИЧЕСКИЕ ЗАДАЧИ УРАВНОВЕШЕННОСТИ (ОДНОВАЛЬНЫЕ ДВИГАТЕЛИ) 51
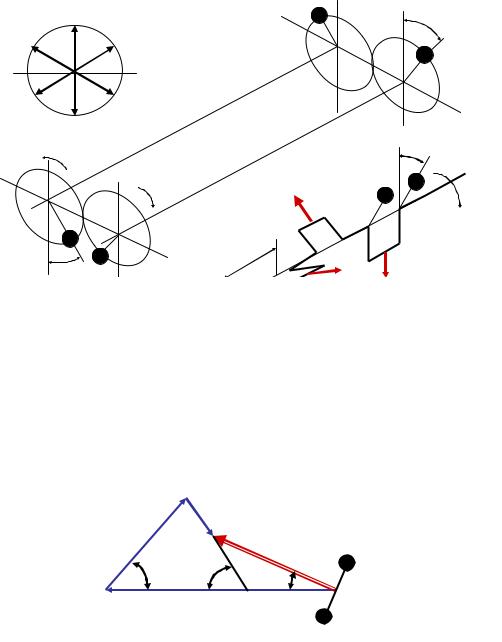
На рисунке 2.16 представлены в плоском (рис. 2.16 а) и пространственном (рис. 2.16 б)
изображениях идентичные совмещенные продольно-несимметричные равномерные схемы расположения радиус-векторов PR центробежных сил инерции НВМ и фиктивных радиус-
векторов СI первого порядка, повторяющие схему расположения кривошипов вала (см. рис. 2.16 в). Радиус-векторы PR и СI не изменяют своего взаимного положения и вращаются как две самостоятельные системы, совмещенные с радиусами кривошипов, вокруг оси коленча-
того вала с его угловой скоростью.
Рассмотрение этих схем приводит к следующим выводам по уравновешенности двига-
теля:
1.Сумма радиус-векторов центробежных сил инерции НВМ равна нулю, т.е. PR = 0.
2.Неуравновешенный продольный момент центробежных сил инерции НВМ
М R 2
 3 PR
3 PR  Lo.
Lo.
Он определяется геометрическим сложением векторов составляющих продольных мо-
ментов (рис. 2.16 г):
M R 1 6 5  PR
PR  Lo ; M R 2 5 3
Lo ; M R 2 5 3  PR
PR  Lo ; M R 3 4 PR
Lo ; M R 3 4 PR  L0 ,
L0 ,
развиваемых парами сил
PR 1 PR 6 ; PR2 PR5 ; PR3 PR4
соответственно и действующих в плоскостях, проходящих через ось коленчатого вала и об-
разующих друг с другом углы, равные 60о. Вектор момента MR лежит в плоскости располо-
жения векторов сил PR 2 и PR 5 и имеет то же направление, что и вектор PR 5. Плоскость дей-
ствия момента MR составляет с плоскостью расположения первого и шестого кривошипов угол, равный 30о.
Уравновешивание продольного момента центробежных сил НВМ достигается уста-
новкой противовесов, размещенных на щеках первого и шестого колен вала таким образом,
что центры тяжести противовесов лежат в плоскости действия уравновешиваемого момента
(рис. 2.16 в).
3. Уравновешивание момента сил инерции первого порядка достигается двухвальным уравновешивающим механизмом, состоящим из двух валов с противовесами по концам,
симметрично расположенных относительно плоскости осей цилиндров и параллельных оси коленчатого вала, которые вращаются со скоростью вращения коленчатого вала в противо-
положных направлениях (рис. 2.16 б). Взаимное расположение противовесов уравновеши-
вающего механизма и кривошипов коленчатого вала показано при положении первого кри-
вошипа в ВМТ.
52 2.2.8. Одновальный двухтактный шестицилиндровый двигатель с клапанно - щелевой продувкой
PR1 |
CI1 |
|
30о |
|
PR4 CI4 |
|
|
PR5 CI5 |
|
|
|
|
|
|
|
|
а) |
|
|
PR3 CI3 |
PR2 CI2 |
|
|
PR6 CI6 |
|
|
|
ω |
|
б) |
30о |
|
ω |
||
|
|
||
|
|
|
|
|
ω |
|
РR5 CI 5 |
Lo
30о |
|
Р |
C |
I 6 |
|
|
R6 |
|
|
Р C |
I 3 |
РR 4 CI 4 |
|
|
R3 |
|
|
|
|
РR1 CI 1 |
|
в) |
|
|
30о
|
|
|
·L 0 |
|
|
|
P R |
|
|
= |
3 |
|
|
|
|
|
|
5 |
|
|
|
- |
|
M |
R |
2 |
|
|
|
||
|
|
|
|
|
|
|
60о |
РR2 CI 2
M |
|
гГ) |
) |
|
|
|
R |
|
|
|
|
||
3 |
|
|
|
|
|
|
- |
|
|
|
|
|
|
4 |
|
|
|
|
|
|
= |
|
|
|
|
|
|
P |
|
|
|
|
|
|
· |
|
|
|
|
|
|
R |
|
|
|
|
|
|
L |
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
∑MR=2√3 PR·L0 |
||||
60о 30о
MR 1-6 = 5PR·L0
Рисунок 2.16 – Схема уравновешивания двухтактного 6-цилиндрового одноблочного одновального транспортного двигателя
Действие уравновешивающего механизма основано на том, что горизонтальные со-
ставляющие векторов центробежных сил противовесов обоих валов на каждом конце двига-
теля взаимно уравновешиваются, а вертикальные – складываются и образуют в плоскости

МОДУЛЬ 2. ПРАКТИЧЕСКИЕ ЗАДАЧИ УРАВНОВЕШЕННОСТИ (ОДНОВАЛЬНЫЕ ДВИГАТЕЛИ) 53
осей цилиндров уравновешивающий момент, равный по величине уравновешивающему про-
дольному моменту первого порядка, но противоположный ему по знаку.
Таким образом, анализ показал, что двухтактный шестицилиндровый одноблочный одновальный двигатель с расположением кривошипов по принятой схеме не самоуравнове-
шен по продольному моменту первого порядка, который погашается в двигателях уравнове-
шивающим механизмом.
2.2.9. Одновальный двухтактный шестицилиндровый двигатель с петлевой про-
дувкой
В данном случае необходимо решить обратную задачу, исходя из следующих сообра-
жений. Так как в двигателе отсутствует кулачковый вал клапанного механизма газораспреде-
ления, то двухвальный уравновешивающий механизм первого порядка значительно услож-
нит конструкцию двигателя. Оставить неуравновешенным продольный момент первого по-
рядка нельзя ввиду его большой величины, а момент второго порядка в малооборотном дви-
гателе может быть оставлен неуравновешенным. По центробежным силам и силам инерции первого и второго порядка двигатель самоуравновешен при любой нумерации кривошипов,
расположенных по лучевой схеме. Следовательно, надо выбрать такую схему вала, которая обеспечивала бы самоуравновешенность двигателя по продольному моменту первого поряд-
ка, не опасаясь за остальные пять признаков.
Выбор схемы расположения кривошипов осуществляется на основе следующих сооб-
ражений:
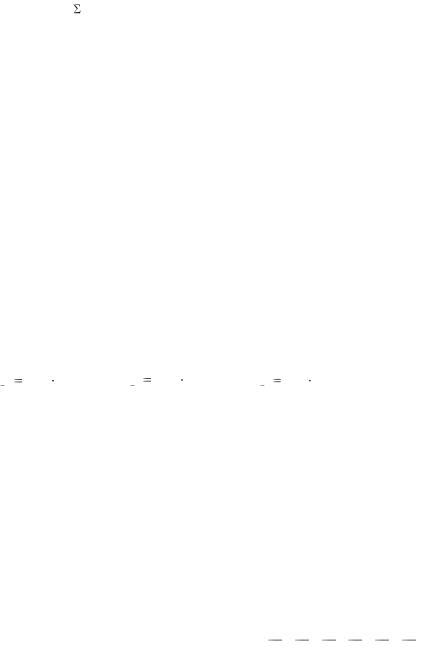
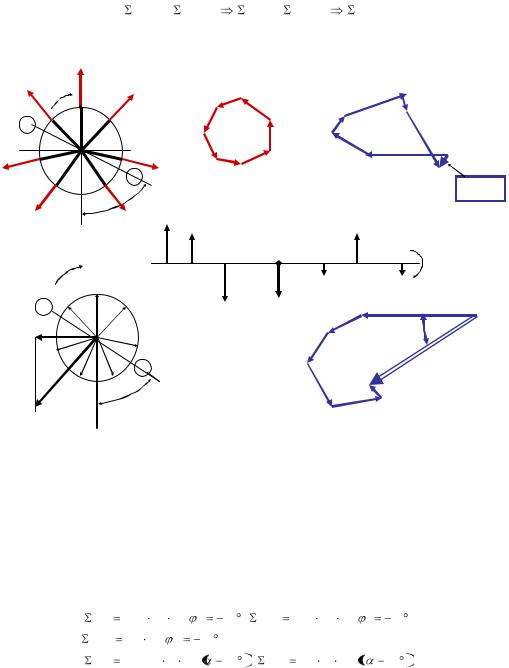
1.По условию равенства интервалов между вспышками в цилиндрах двигателя шесть кривошипов вала должны быть расположены по равномерной продольно-несимметричной схеме под углами, равными 60° (рис. 2.17 а).
2.Радиус-векторы РR центробежных сил инерции НВМ и фиктивные радиус-векторы
СI первого порядка направлены по радиусам соответствующих кривошипов вала и повторяют схему их расположения (рис. 2.17 б).
3. При любой нумерации кривошипов вдоль вала выполняются условия PR = 0 и СI
= 0, откуда PI = 0, соответствующие самоуравновешенности двигателя по центробежным силам иенрции НВМ и силам первого порядка.
4. Из рассмотрения незавершенной схемы расположения фиктивных радиус-векторов СI первого порядка с неуказанными номерами цилиндров, совмещенной с радиус-векторами центробежных сил (рис. 2.17 б), очевидно следующее:
54 |
2.2.9. Одновальный двухтактный шестицилиндровый двигатель с петлевой продувкой |
-во-первых, радиус-векторы СI расположены в трех плоскостях, проходящих через ось коленчатого вала и образующих с другом углы, равные 60о;
-во-вторых, в каждой такой плоскости лежат два вектора противоположного направ-
ления, развивающие продольный фиктивный момент, величина которого зависит от плеча пары, определяемого порядковыми номерами соответствующих радиус-векторов;
- в третьих, условие равенства нулю радиус-вектора результирующего момента сил
инерции первого порядка М сI = 0 может быть выполнено только в том случае, когда ради-
ус-векторы составляющих фиктивных продольных моментов первого порядка будут равны друг другу и образуют при геометрическом сложении замкнутый равносторонний треуголь-
ник (рис. 2.17 в).
5. Необходимое равенство радиус-векторов составляющих фиктивных продольных моментов первого порядка возможно при условии равенства плеч трех пар фиктивных ради-
ус-векторов СI, развивающих эти составляющие моменты.
6. Для перехода к окончательной схеме расположения фиктивных радиус-векторов первого порядка изображается равносторонний треугольник, образованный векторами со-
ставляющих фиктивных продольных моментов первого порядка таким образом, чтобы каж-
дый из векторов был перпендикулярен плоскости расположения соответственной паре фик-
тивных радиус-векторов СI |
неокончательной схемы их расположения. |
После этого векторам продольных моментов задается направление, удовлетворяющее |
|
условию равенства нулю их геометрической суммы (рис. 2.17 г). |
|
При длине плеча, равной 3Lо, составляющие фиктивные продольные моменты первого |
|
порядка: |
|
M cI (1 4) 3CI Lo |
M cI (2 5) 3CI Lo M cI (3 6) 3CI Lo |
должны быть образованы парами фиктивных радиус-векторов первого порядка СI , порядко-
вые номера которых по длине вала в пределах каждой пары должны различаться на три еди-
ницы, а именно: первым и четвертым, вторым и пятым, третьим и шестым. Обозначения на-
носятся на треугольную схему расположения векторов моментов при их геометрическом сложении (рис. 2.17 г). Далее в соответствии с направлением векторов моментов для каждой соответственной пары фиктивных радиус-векторов СI на неокончательной схеме их распо-
ложения записываются порядковые номера векторов, что приводит схему к завершению (рис. 2.17 д).
Полученная таким образом схема расположения фиктивных радиус-векторов первого порядка позволяет перейти к искомой схеме расположения кривошипов (рис. 2.17 е). Постав-
ленному условию удовлетворяет схема коленчатого вала: 1 5 3 4 2 6 1.
МОДУЛЬ 2. ПРАКТИЧЕСКИЕ ЗАДАЧИ УРАВНОВЕШЕННОСТИ (ОДНОВАЛЬНЫЕ ДВИГАТЕЛИ) 55
Величина неуравновешенного продольного момента второго порядка при выбранной
схеме равна: M |
|
|
|
|
|
|
|
|
30 . |
|
II |
2 3C |
II |
l |
o |
cos 2 |
|
||||
|
|
|
|
|
|
|
|
|||
Плоскость действия фиктивного момента |
составляет с вертикальной плоско- |
|||||||||
|
|
|
|
|
|
|
|
|
|
MCII |
стью угол 30 в направлении, противоположном вращению коленчатого вала. Результирую-
в направлении, противоположном вращению коленчатого вала. Результирую-
щий вектор этого момента направлен по векторам С |
II2 |
, C |
. |
|
|
||||||
|
|
|
|
|
|
|
|
II5 |
|
||
|
|
|
|
б) |
|
|
|
|
|
в) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
а) |
|
PR |
CI |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
PR CI |
600 PR CI |
600 |
|
|||||||
|
600 |
|
|||||||||
|
|
|
|
|
|
|
|
|
600 |
600 |
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
PR CI |
|
PR CI |
|
|
|
|||
|
|
|
|
|
|
|
|||||
|
|
|
|
PR CI |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
г) |
|
|
|
|
|
|
|
|
|
|
М |
|
|
|
|
|
|
|
L |
о |
- |
|
|
|
|
|
|
· |
|
|
С |
|
|
|
|
|
|
|
|
6 |
|
|
|
|
|
|
|
|
|
|
3 |
|
|
|
|
3 |
С |
I |
|
|
= |
|
|
|
= |
|
|
600 |
3 |
||
|
|
|
|
|
|
С |
|||
|
|
|
|
|
|
|
|
I |
|
|
|
|
5 |
|
|
|
|
|
· |
|
|
|
|
|
|
|
|
L |
|
|
|
2 |
- |
|
|
|
|
|
|
|
С |
|
|
|
|
|
|
||
М |
|
|
|
|
|
|
о |
||
|
|
|
|
|
|
600 |
600 |
||
|
|
|
|
|
|
|
МС 1- 4 = 3СI ·L о
|
д) |
CI 1 |
|
|
|
|
е) |
1 |
|
|
|
|
|
|
|
|
|
|
|||
CI 5 |
600 |
CI 6 |
5 |
|
|
600 |
6 |
|||
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
CI 3 |
|
CI 2 |
|
|
|
|
|
|
||
|
3 |
|
|
|
2 |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
CI 4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
4 |
|
||
|
|
|
|
|
|
|
|
|
||
Рисунок 2.17 – Определение схем расположения кривошипов вала 2-тактного 6-
цилиндрового однорядного одновального малооборотного двигателя
В малооборотном двигателе продольный момент второго порядка может быть остав-
лен неуравновешенным ввиду его малой величины.
2.2.10. Одновальный двухтактный семицилиндровый двигатель
Многоцилиндровые рядные компоновочные схемы широко применяются в малообо-
ротных судовых дизелях. Из множества возможных лучевых схем расположения кривошипов
выберем для анализа три, наиболее полно отвечающие известным признакам:
1 5 3 6 2 4 7 1,
56 2.2.10. Одновальный двухтактный семицилиндровый двигатель
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
360 |
|
1 |
7 |
4 |
2 |
6 |
3 |
|
5 |
|
1, |
|
51 26 |
|||||||||||||||
|
|
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
КР |
ВСП |
7 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
6 |
|
|
3 |
|
4 |
|
5 |
|
2 |
|
|
7 |
|
|
1, |
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
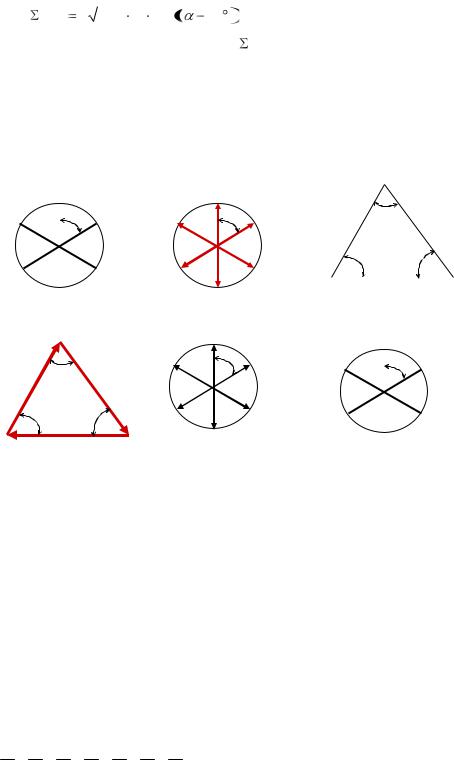
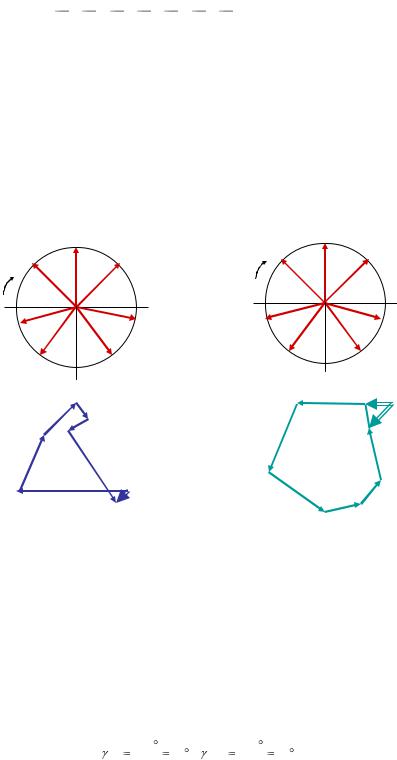
Две первые схемы по динамическим свойствам равнозначны, т.к. одна зеркально ото-
бражает другую. Выполнив все необходимые векторные построения (рис. 2.18), убеждаемся,
что векторный многоугольник центробежных сил замкнут, следовательно, |
PR = 0. |
||
Из векторного многоугольника центробежных моментов определяется величина и |
|||
плоскость действия результирующего неуравновешенного момента: M R |
0,85 PR lo , R = |
||
−70 (округление до целых), где R − угол, который составляет с вертикалью плоскость дей- |
|||
ствия момента M |
R |
; знак «минус» означает, что плоскость действия момента повернута по |
|
|
|
|
|
вертикали против вращения вала. Продольный момент от центробежных сил легко уравно-
вешивается противовесами на коленчатом валу.
Распространяя эти выводы на фиктивные силы первого порядка и моменты от них, по-
лучим: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
СI = 0; |
PI = 0; |
|
M |
C |
I |
|
0,85C |
I |
l |
o |
; |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
1 |
70 ; |
M I 0,85CI |
|
lo cos |
|
70 . |
||||||||||
Величина результирующего момента первого порядка невелика, и его можно оставить |
||||||||||||||||
неуравновешенным. Очевидно, что векторный многоугольник фиктивных сил СII будет также |
||||||||||||||||
замкнут, следовательно: CII |
= 0; |
|
PII = 0. Из векторного многоугольника фиктивных мо- |
|||||||||||||
ментов второго порядка определяем величину и направление результирующего момента: |
||||||||||||||||
|
|
M |
CII |
5,52C |
II |
l |
o |
, |
|
|
II |
57 . |
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
Проектируя вектор |
MC |
II |
на плоскость, перпендикулярную плоскости осей цилинд- |
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ров, находим величину и направление реально действующего неуравновешенного момента
второго |
порядка: |
M II |
MC |
cos57 или для любого положения КШМ ( |
0): |
|
|
|
|
II |
|
M II |
5,52CII lo |
cos 2 |
57 . Для уравновешивания этого момента необходим двухваль- |
||
ный уравновешивающий механизм.
Если коленчатый вал выполнен по второй схеме первого варианта, то величина всех неуравновешенных продольных моментов остается той же самой, но изменится их знак.
Результаты анализа справедливы и для четырехтактных двигателей с теми же схемами коленчатого вала и соответствующими порядками работы цилиндров:
1 – 3 – 2 – 7 – 5 – 6 – 4 – 1 и 1 – 4 – 6 – 5 – 7 – 2 – 3 – 1.
720°
МОДУЛЬ 2. ПРАКТИЧЕСКИЕ ЗАДАЧИ УРАВНОВЕШЕННОСТИ (ОДНОВАЛЬНЫЕ ДВИГАТЕЛИ) |
57 |
|||||||||||||
|
|
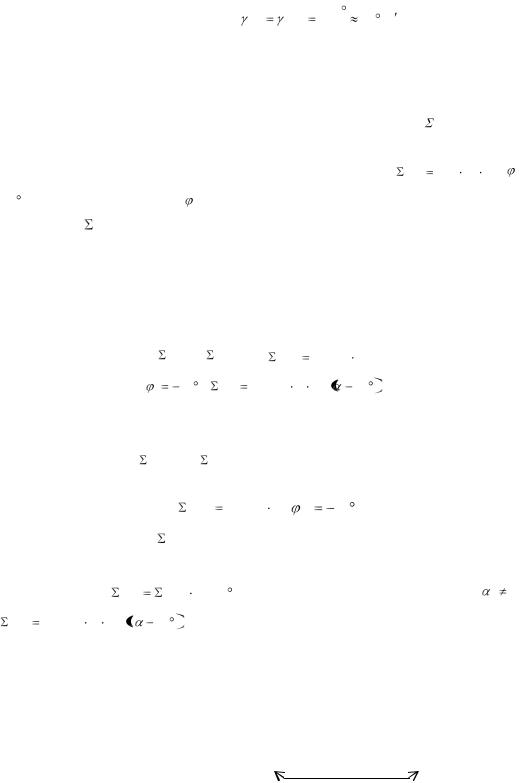
Рассмотрим второй вариант (рис. 2.19). Очевидно, что при любой нумерации криво- |
||||||||||||
шипов и векторов векторный многоугольник сил PR, CI, |
CII всегда будет замкнут, и поэто- |
|||||||||||||
му: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
PR = 0; CI = 0 |
|
PI = 0; CII = 0 |
PII. |
|
|
|
|||
|
|
|
РR1,СI1 |
|
|
|
|
|
|
|
|
|
|
|
|
РR5,СI5 |
РR7,СI7 |
|
|
|
|
|
|
|
|
|
|||
|
|
|
ω |
|
РR3 |
|
|
МR2 |
|
МR3 |
|
|||
|
|
|
1 |
|
|
РR5 |
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
5(7) 7(5) |
|
РR6 |
|
МR5 |
|
|
М |
|
|||
|
|
|
|
|
|
|
|
|
РR1 |
|
|
|
R7 |
|
|
|
|
3(4) |
4(3) |
|
РR2 |
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
0 |
|
||||
|
|
|
|
|
|
|
|
МR6 |
|
|
||||
|
|
|
6(2) |
|
|
|
|
РR4 |
РR7 |
|
МR1 |
|
||
|
|
|
2(6) |
|
РR4,СI4 |
|
|
|
|
|||||
Р |
,С |
|
|
|
|
|
|
|||||||
I3 |
|
|
|
|
|
∑МR |
|
|||||||
|
R3 |
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
70о |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
РR6,СI6 |
РR2,СI2 |
СII1 |
СII2 |
|
|
|
С |
|
|
|
||
|
|
|
|
|
|
|
II6 |
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
2ω |
|
|
|
|
|
|
|
|
|
2ω |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
СII1 |
СII5 |
|
|
|
СII5 |
|
СII7 |
|
|
|
|
|
|
СII2 |
|
|
|
|
|
М |
|
||||
|
|
|
|
|
|
|
|
|
СII4 |
МСII2 |
|
|
СII1 |
|
|
∑МII |
|
|
|
СII3 |
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|||||
|
|
СII7 |
|
|
|
|
|
|
570 |
|
||||
|
|
|
|
|
|
|
МСII7 |
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
СII5 |
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
∑МCII |
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
СII3 |
|
|
|
|
МСII6 |
|
|
МСII5 |
|
|
|
|
|
СII4 |
|
|
|
|
|
|
|
||||
|
|
∑МCII |
|
570 |
|
|
|
|
|
МСII3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
Рисунок 2.18 – Анализ уравновешенности 2-тактного 7-цилиндрового рядного двига- |
||||||||||||
теля
Выполнив геометрическое сложение действующих моментов, определим величину и плоскость действия результирующих неуравновешенных моментов:
M R |
0,27 PR |
lo ; |
R |
64 ; |
M CI |
0,27 CI |
lo ; I |
64 ; |
M CII |
CII lo ; |
II |
38 ; |
|
|
|
|
|
M I |
0,27CI |
lo cos |
64 ; |
M II |
CII lo |
cos 2 |
38 . |
|
58 |
2.2.10. Одновальный двухтактный семицилиндровый двигатель |
В четырехтактном двигателе с той же схемой коленчатого вала порядок работы ци-
линдров изменится: 1 3 5 7 6 4 2 1, а результаты анализа уравновешенно-
сти сохраняются.
Из сравнения рассмотренных вариантов следует, что в первом случае отсутствуют по-
следовательные вспышки в соседних цилиндрах (2-тактный цикл), во втором они есть. В
первом варианте необходимо уравновешивать, по крайней мере, продольный момент второго порядка, что значительно усложняет конструкцию двигателя. Во втором случае величина неуравновешенных моментов центробежных сил и сил инерции первого порядка в 3 раза, а
момента второго порядка в 5,5 раз меньше, и их можно оставить неуравновешенными. Вто-
рая схема вала более предпочтительна и для четырехтактного двигателя.
|
|
|
РR1,CI1 |
|
|
|
РR1,CI1 |
РR1,CI1 |
|
|
|
|
|
|
|
|
ω |
|
|
Р |
R1 |
,C |
|
РR1,CI1 |
|
I1 |
|
||
|
|
РR1,CI1 |
РR1,CI1 |
|
|
|
|
|
|
|
|
|
МR6 |
МR3 |
|
|
|
|
МR5 |
|
|
М |
R2 |
МR7 |
|
|
|
|
∑МR |
|
|
|
|
МR1 |
|
CII1 |
|
|
CII5 |
CII4 |
2ω |
|
|
|
|
|
CII6 |
|
CII7 |
|
CII2 |
CII3 |
|
|
|
|
МСII1 |
∑М |
|
|
II |
М |
СII7 |
∑МCII |
|
|
|
|
|
МСII6 |
МСII2 |
МСII5 |
|
|
МСII3 |
|
Рисунок 2.19 – Определение результирующих неуравновешенных моментов в рядном
7-цилиндровом двигателе
2.2.11. Одновальный четырехтактный 8-цилиндровый двигатель
Четное число цилиндров позволяет применить равномерную продольно-
симметричную схему коленчатого вала:
|
360 |
90 ; |
|
720 |
90 . |
КР |
4 |
ВСП |
8 |
||
|
|
|
|

МОДУЛЬ 2. ПРАКТИЧЕСКИЕ ЗАДАЧИ УРАВНОВЕШЕННОСТИ (ОДНОВАЛЬНЫЕ ДВИГАТЕЛИ) 59
|
|
Условию равномерного чередования вспышек удовлетворяют две равнозначные схе- |
|||||||||||||||||||
мы, рис. 2.20, с порядками работы цилиндров: |
|
|
|
|
|
|
|
|
|
|
|||||||||||
1 |
3 |
7 |
5 |
8 |
|
6 |
2 |
4 |
1; 1 |
5 |
7 |
3 |
8 |
4 |
2 |
6 |
1; |
||||
1 |
6 |
2 |
4 |
8 |
|
3 |
7 |
5 |
1; 1 |
4 |
2 |
6 |
8 |
5 |
7 |
3 |
1 |
||||
|
|
Из векторных диаграмм видно, что суммы всех векторов равны нулю, т.е. PR = 0; CI |
|||||||||||||||||||
= 0 |
|
PI = 0; CII = 0 |
PII = 0. |
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
1 8 |
|
|
|
|
|
РR1 |
РR8 |
|
|
|
||||
|
|
|
|
ω |
|
|
|
|
|
|
ω |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
4(3) |
|
|
|
|
|
4(3) |
РR3 |
|
|
|
|
|
|
|
|
РR4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
5(6) |
|
|
|
|
|
6(5) |
РR6 |
|
|
|
|
|
|
|
|
РR5 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 7 |
|
|
|
|
|
РR2 |
РR7 |
|
|
|
||||
|
|
|
|
|
|
|
CI1 |
|
CI8 |
|
|
|
|
CII1,СII 2,СII7,СII8 |
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
ω |
|
|
|
|
|
|
2ω |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
CI3 |
|
|
|
|
|
|
C |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
CI5 |
|
|
|
|
|
I4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
CI5 |
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
CI2 |
|
CI7 |
|
|
|
|
|
,СII5,СII6 |
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
CII3,СII 4 |
|
|
|
||||||
Рисунок 2.20 – Схема коленчатого вала и векторные диаграммы 4-тактного рядного 8-
цилиндрового двигателя
Суммарный момент от каждой продольно-симметричной (равноудаленной от центра тяжести вала) пары сил, лежащих в одной плоскости, равен нулю, т.к. составляющие момен-
ты равны по величине и противоположны по направлению. Например, продольный момент от пары любых сил 1 - 8 равен нулю, т.к.
M R1 3,5PR  lo ; M R8
lo ; M R8  3,5PR
3,5PR  lo ; M R1 3 M R1 M R8 0
lo ; M R1 3 M R1 M R8 0
и т.д. для всех пар 2-7, 3-6, 4-5. Следовательно, и общие результирующие моменты от всех действующих сил также равны нулю, т.е. MR = 0; MCI = 0  MI = 0; MCII = 0 MII = 0.
MI = 0; MCII = 0 MII = 0.
Таким образом, четырехтактный восьмицилиндровый однорядный одновальный дви-
гатель с продольно-симметричной схемой расположения кривошипов коленчатого вала пол-
ностью самоуравновешен по всем признакам.

60 2.2.12. Одновальный двухтактный 8-цилиндровый двигатель
2.2.12. Одновальный двухтактный 8-цилиндровый двигатель
Схема коленчатого вала может быть только лучевой с углами между кривошипами и
между вспышками по двигателю. Нумерация кривошипов и соответствующие порядки рабо-
ты цилиндров многовариантны. Для того, чтобы выбрать лучший вариант, пришлось бы по-
следовательно анализировать все варианты. Задачу можно упростить, если воспользоваться уже имеющимся опытом. Известно, что равномерная лучевая схема расположения векторов
PR и CI, повторяющая схему вала, обеспечивает самоуравновешенность двигателя по центро-
бежным силам и силам инерции первого порядка при любой нумерации кривошипов. Мо-
мент от центробежных сил всегда легко уравновесить без усложнения конструкции двигате-
ля выносными противовесами на коленчатом валу. Уравновешивающий механизм продоль-
ного момента первого порядка при клапанно-щелевой продувке также упрощается за счет использования кулачкового вала привода клапанов. Следовательно, основную трудность представляет продольный момент второго порядка, уравновешивание которого потребует значительного усложнения конструкции двигателя. Поэтому сформулируем задачу следую-
щим образом: выбрать схему коленчатого вала, обеспечивающую самоуравновешенность двигателя по продольному моменту от сил инерции второго порядка и минимальные значе-
ния неуравновешенных продольных моментов от центробежных сил и сил инерции второго порядка. Возможны несколько вариантов решения этой обратной задачи.
Вариант I (рис.2.21). Момент MII, если M |
CII |
0 , следовательно, силы CII, равно- |
|
|
удаленные от центра тяжести вала, должны образовывать равные по величине и противопо-
ложные по знаку моменты. Это достигается при равномерной продольно-симметричной схе-
ме расположения векторов CII. Рассмотрим нормально-симметричную схему, в которой двойной крест образован симметричными парами крайних (1-8 и 2-7) и средних (4-5, 3-6)
векторов, расположенными в двух взаимно перпендикулярных плоскостях. На векторной диаграмме CII показаны два возможных варианта такой схемы.
Перейдем от схемы векторов CII к векторной диаграмме CI, для чего необходимо уменьшить в два раза угол между вектором первого цилиндра , и вектором рассматри-
ваемого цилиндра СIIi . Каждой из схем векторов CII соответствуют две векторные диаграм-
мы CI, на рис.2.21 показан один вариант.