

В.А. Синицын
.pdfМОДУЛЬ 3. ПРАКТИЧЕСКИЕ ЗАДАЧИ УРАВНОВЕШЕННОСТИ (ДВУХРЯДНЫЕ ДВИГАТЕЛИ) 71
четырехтактный
|
Л |
1 |
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
П |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
2 |
|
|
|
|
|
|
|
|
|
|
480 |
|
|
|
|
|
|
|
|
|
|
|
|
с симметричной схемой вала |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
Л |
1 |
|
|
|
2 |
|
|
|
|
1 |
|
|
|
|
|
||
|
|
|
|
П |
120 |
|
1 |
|
120 |
|
2 |
120 |
|
|
|
|
|
||||
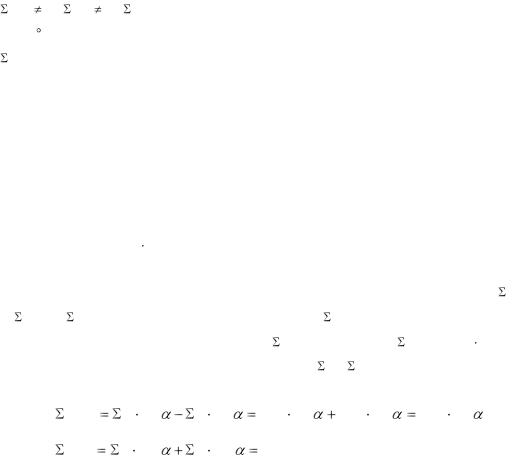
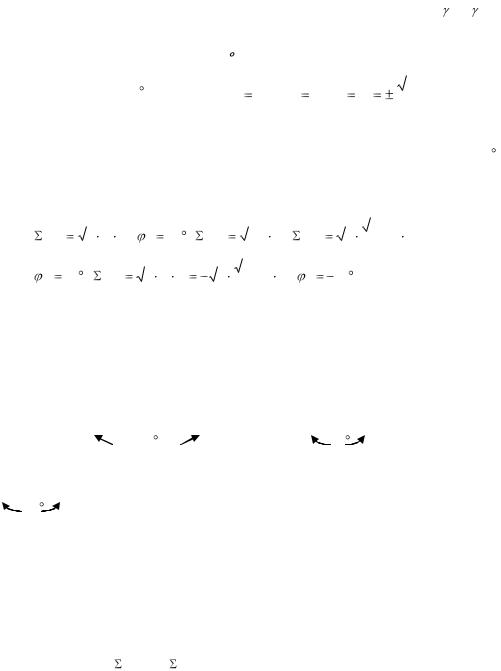
Построив векторные диаграммы сил Q и P, рис. 2.26, находим продольные моменты от |
|||||||||||||||||||||
этих сил: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
при несимметричном вале |
MQ |
Q lo ; M P |
|
|
P lo ; |
|
|
|
|
||||||||||||
|
|
|
|
|
|
1 2 |
|
|
1 2 |
|
|
|
|
|
|
|
|||||
при симметричном вале |
MQ |
0; |
M P |
0. |
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
1 2 |
|
|
1 2 |
|
|
|
|
|
|
|
|
|
|||
Продольный момент MQ уравновешивается противовесами на концах коленчатого ва-
ла, а для уравновешивания момента MP требуется дополнительный вал с выносными проти-
вовесами, вращающийся против вращения коленчатого вала.
Векторные диаграммы сил K и Z такие же, что и для двигателя 4V 90 . Суммарные силы равны: K = 2K = 2  0.5
0.5  CII; Z = 2Z = −2
CII; Z = 2Z = −2  CII. Суммарные векторы симметричны относительно оси Х и эллиптический годограф результирующего вектора вытянут вдоль оси
CII. Суммарные векторы симметричны относительно оси Х и эллиптический годограф результирующего вектора вытянут вдоль оси
Х. Для уравновешивания |
сил K и Z требуется двухвальный уравновешивающий механизм |
||||||||
второго порядка. |
|
|
|
|
|
|
|
|
|
|
|
|
ω |
|
|
|
|||
|
Л |
Q1 |
|
П Л |
|
|
П |
||
|
|
|
|
|
|||||
|
|
|
|
|
|
||||
|
|
|
|
|
|
Q1 |
|
Q2 |
|
|
MQ |
P2 |
|
ω |
|
ω |
|||
|
|
|
|||||||
|
|
|
MP |
|
|||||
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
P1 |
|
ω |
|
ω |
|||
|
|
|
|
|
|
|
|||
|
|
Q2 |
|
|
|
P1 |
|
P2 |
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
ω
Рисунок 2.26 – Векторные диаграммы ДЭМ I двигателя 4V120°
72 2.3.3. Транспортный двигатель 4 V 180
2.3.3. Транспортный двигатель 4 V 180
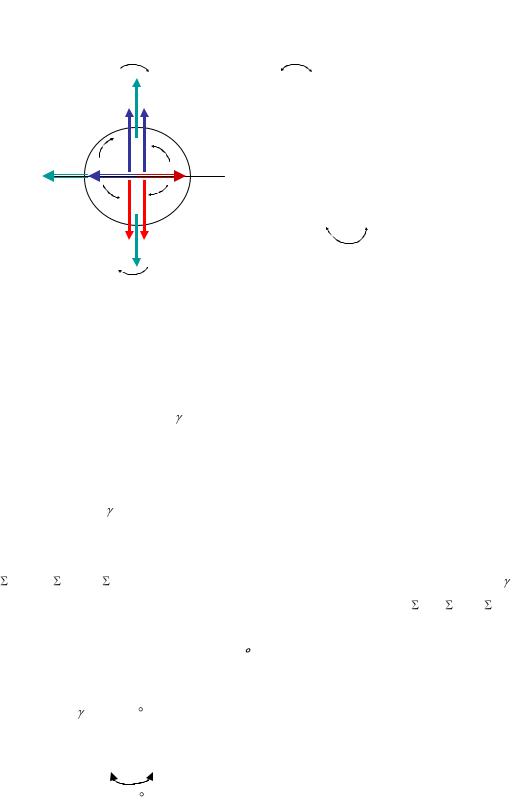
Двухтактный двигатель оппозитной компоновки нецелесообразен, т.к. при любой рав-
номерной схеме вала неизбежны одновременные вспышки в цилиндрах левого и правого блоков. Поэтому рассматривается «четырехтактный» двигатель, у которого при несиммет-
ричной схеме вала двухцилиндровые блоки не уравновешены по следующим признакам:
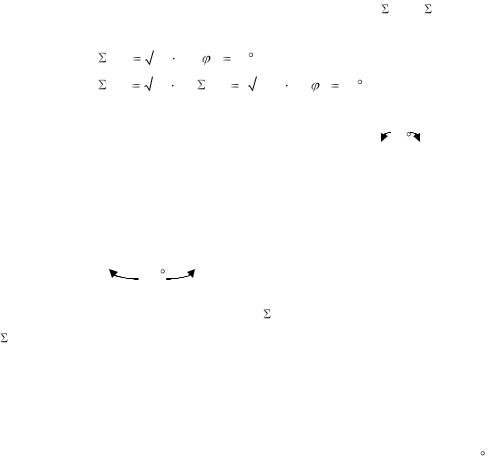
MR 0; MI 0, PII  0. Рассматривая двигатель 4V180
0. Рассматривая двигатель 4V180 состоящим из двух отсеков
состоящим из двух отсеков
2V180 , приходим к выводу, что он самоуравновешен по силам инерции второго порядка
PII = 0, т.к. в каждом из отсеков векторы К = 0; Z = 0. Анализируем уравновешенность дви-
гателя по оставшимся признакам на динамически эквивалентной модели двигателя, рис. 2.27.
Из свойства отсека 2V180 известно, что векторы F и Р численно равны: F = P = CI. Следо-
известно, что векторы F и Р численно равны: F = P = CI. Следо-
вательно, продольные моменты, развиваемые парами равных сил F1 – F2 и Р1 – Р2 с одинако-
вым плечом lo, будут также равны между собой. А так как направление действия этих момен-
тов противоположно (MF = - MP ), то они взаимно уравновешивают друг друга.
Таким образом, в четырехтактном четырехцилиндровом оппозитном двигателе с пло-
ской несимметричной схемой вала несамоуравновешен только продольный момент от цен-
тробежных сил MP = PR lo Этот момент легко уравновешивается противовесами на коленча-
Этот момент легко уравновешивается противовесами на коленча-
том валу.
При симметричной схеме вала двигатель самоуравновешен по всем моментам ( MR =
0; MI = 0, MII |
= 0) и силам инерции второго порядка ( |
PII = 0). Неуравновешенные резуль- |
||||
тирующие силы находятся из ДЭМ I, рис. 2.27: Q = 2Q = 2(PR +CI); |
P = 2P = -2 CI. |
|||||
Составим сумму проекций результирующих сил |
F и P на координатные оси: |
|||||
( |
PI ) X |
F sin |
P sin |
2CI sin |
2CI sin |
4CI sin ; |
( |
PI )Y |
F cos |
P cos |
0. |
|
|
Следовательно, результирующая неуравновешенная сила инерции первого порядка действует в горизонтальной плоскости вдоль оси Х, проходящей через центр тяжести двига-
теля, с амплитудой, изменяющейся от +4CI до – 4CI. Для уравновешивания этой силы необ-
ходим одновальный уравновешивающий механизм. Центробежные силы инерции уравнове-
шиваются противовесами на щеках коленчатого вала.
МОДУЛЬ 3. ПРАКТИЧЕСКИЕ ЗАДАЧИ УРАВНОВЕШЕННОСТИ (ДВУХРЯДНЫЕ ДВИГАТЕЛИ) 73
|
|
ω |
|
|
|
|
900 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
PR1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Л |
1 |
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|||
|
|
F1 |
P2 |
|
|
П |
|
|
|
|
1 |
|
|
2 |
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ω |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ω |
|
|
|
|
|
|
|
|
или |
|
|
|
|
|
|
|
||||
Л MR |
M |
|
M |
П |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
F |
|
P |
|
Л |
|
1 |
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ω |
ω |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
П |
|
|
|
|
|
|
|
|
|
2 |
|
|
|
1 |
|
|
|
|
|
|
P1 |
F2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
PR2 1800
ω
Рисунок 2.27 – Анализ уравновешенности 4-тактного двигателя 4V180°
Транспортные двигатели 6 V
Двигатели V- образной компоновки с трехцилиндровыми блоками цилиндров при лю-
бом значении угла между блоками БЛ и независимо от их тактности обладают рядом общих свойств, которые будут использованы в дальнейшем анализе. Схема расположения кривоши-
пов коленчатого вала для всех двигателей одна – равномерная продольно-несимметричная.
Порядок работы цилиндров в двухтактном двигателе однозначно определяется углами за-
клинки кривошипов и БЛ, в четырехтактных двигателях возможны различные варианты, из которых выбирается оптимальный по рассмотренным ранее признакам. Из анализа одноряд-
ного трехцилиндрового двигателя известно, что он самоуравновешен по следующим призна-
кам: РR = 0; РI |
= 0, |
РII = 0. Следовательно, все задачи уравновешенности двигателей 6V |
||||||||||||
будут относиться только к продольным моментам от всех действующих сил |
MR ; MI и MII |
|||||||||||||
. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2.3.4. Транспортный двигатель 6 V 120 |
|
|
|
|
|
|
|
|||||||
Назначается порядок работы цилиндров, обеспечивающий равномерный выходной |
||||||||||||||
крутящий момент |
ВСП = 120 : |
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Л |
1 |
|
|
|
2 |
|
|
|
3 |
|
|
|
|
|
П |
|
|
1 |
|
|
|
2 |
|
|
|
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
60 |
|
|
|
|
|
|
|
|
|
|
|
74 2.3.4. Транспортный двигатель 6 V 120
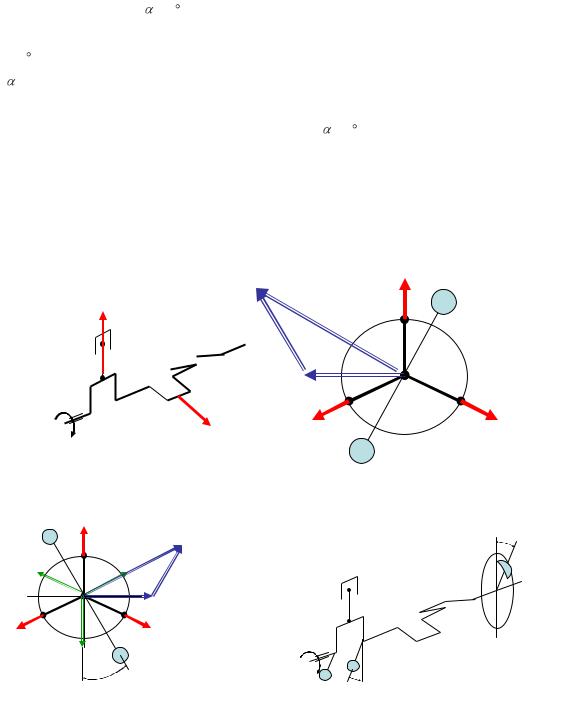
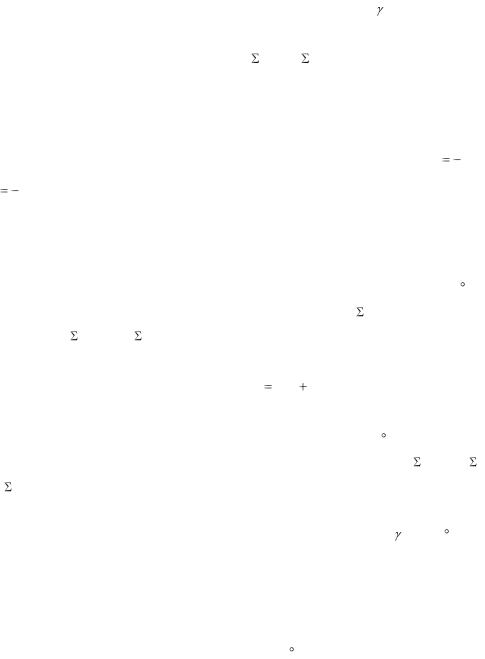
При построении ДЭМ I двигателя изображается схема расположения кривошипов в
начальном положении ( = 0 ) и по ним направляются векторы Q = F + PR (рис. 2.28). Для определения положения векторов Р воспользуемся свойствами векторов F и Р в отсеке 2V 120 : их симметрией относительно оси Х и противоположным направлением вращения. При
= 0 вектор Р1 первого отсека направлен симметрично вектору Q1 вертикально вниз. При определении направления векторов Р2 и Р3 второго и третьего отсеков соответствующий кривошип мысленно ставится в начальное положение ( = 0 ), когда вектор Р направлен вер-
вектор Р1 первого отсека направлен симметрично вектору Q1 вертикально вниз. При определении направления векторов Р2 и Р3 второго и третьего отсеков соответствующий кривошип мысленно ставится в начальное положение ( = 0 ), когда вектор Р направлен вер-
тикально вниз. Затем надо повернуть вектор Р против ращения коленчатого вала на угол,
равный углу поворота рассматриваемого кривошипа от начального положения. На схеме рис.
2.28 эти углы равны: для второго отсека 120 , для третьего – 240 .
Q1
MQ3
Q3  3
3
2
ω1
Q2
Q1
∑ |
|
|
M |
|
|
Q |
|
|
|
|
1 |
|
|
|
MQ1 |
|
|
3 |
2 |
|
|
Q3 |
Q2 |
|
|
|
Q1 |
|
|
|
|
|
|
|
30о |
|
|
MP |
|
|
|
|
∑ |
|
|
|
P3 |
P2 |
|
|
|
1 |
|
MP3 |
|
|
|
|
|
3 |
|
|
MP1 |
|
|
|
3 |
2 |
|
|
|
Q3 |
Q2 |
|
2 |
|
ω |
1 |
|||
|
|
|||
|
|
|
||
P1 |
|
|
|
|
30о |
|
|
||
|
|
|
30о |
|
Рисунок 2.28 – Уравновешивание двигателя 6 V 120° (ДЭМ I)
МОДУЛЬ 3. ПРАКТИЧЕСКИЕ ЗАДАЧИ УРАВНОВЕШЕННОСТИ (ДВУХРЯДНЫЕ ДВИГАТЕЛИ) 75
Таким образом, ДЭМ I двигателя представляет собой две жесткие векторные системы
Q и Р, в каждой из которых векторы не изменяют своего взаимного положения. Система векторов Q всегда повторяет схему расположения кривошипов и вращается вместе с ними.
Система векторов Р вращается с той же угловой скоростью , что и система Q, но в обратном направлении. Произведя геометрическое сложение векторов составляющих моментов сил Q
и Р: MQ1 = MQ3 = Q lO; MQ2 = 0;
MP1 = MP3 = P lO; MP2 = 0.
находим величину и плоскость действия результирующих неуравновешенных моментов:
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
30 . |
M |
Q |
3Q l |
; |
M |
P |
3P l |
o |
3 0.5C |
I |
l |
; |
||||
|
|
o |
|
|
|
|
|
|
o |
|
|
||||
Уравновешивание продольного момента MQ осуществляется выносными противове-
сами (с использованием дисбалансов) на коленчатом валу, которые устанавливаются в плос-
кости действия момента, т.е. при = 0 , повернуты по направлению вращения на 30 . Урав-
новешивающий механизм продольного момента МР состоит из дополнительного вала, вра-
щающегося с угловой скоростью  против вращения коленчатого вала, на котором установ-
против вращения коленчатого вала, на котором установ-
лены противовесы, повернутые по направлению вращения вала на 30 .
Динамически эквивалентная модель второго порядка двигателя 6V 120 состоит из моделей трех плоских отсеков 2V 120
состоит из моделей трех плоских отсеков 2V 120 и представляет собой две жесткие системы векторов
и представляет собой две жесткие системы векторов
К и Z, вращающиеся в противоположных направлениях с удвоенной угловой скоростью
(система К вращается по направлению вращения коленчатого вала). Рассмотрим подробнее,
как строится эта модель (рис. 2.29). Из динамических свойств отсека 2V120 известно, что векторы К и Z симметричны относительно оси Х. Рассматриваем кривошип первого отсека в начальном положении: вектор К1 направляется по кривошипу, тогда вектор Z1 будет иметь противоположное направление. Второй и третий кривошипы развернуты относительно пер-
известно, что векторы К и Z симметричны относительно оси Х. Рассматриваем кривошип первого отсека в начальном положении: вектор К1 направляется по кривошипу, тогда вектор Z1 будет иметь противоположное направление. Второй и третий кривошипы развернуты относительно пер-
вого на углы 120 и 240 . Удваивая эти углы, находим положение векторов К2 и К3 второго и третьего отсеков. Поставив мысленно кривошип второго отсека в начальное положение, при котором вектор Z2 направлен вертикально вниз, поворачиваем вектор Z2 против вращения векторной системы К на угол 2 120
и 240 . Удваивая эти углы, находим положение векторов К2 и К3 второго и третьего отсеков. Поставив мысленно кривошип второго отсека в начальное положение, при котором вектор Z2 направлен вертикально вниз, поворачиваем вектор Z2 против вращения векторной системы К на угол 2 120 = 240
= 240 и находим его истинное положение. Кривошип третьего отсека повернут от начального положения на 240 ; удваивая этот угол в обратном направлении, находим положение вектора Z3. Произведя геометрическое сложение векторов продольных моментов от сил К и Z:
и находим его истинное положение. Кривошип третьего отсека повернут от начального положения на 240 ; удваивая этот угол в обратном направлении, находим положение вектора Z3. Произведя геометрическое сложение векторов продольных моментов от сил К и Z:

76 |
2.3.4. Транспортный двигатель 6 V 120 |
|||
|
|
К1 |
м |
|
|
|
|
|
|
|
|
Z2 |
1 |
|
|
ω |
|
Z3 |
|
|
|
120о |
||
|
|
|
|
|
|
1 |
120о |
|
|
|
3 |
2 |
|
|
|
|
3 |
120о |
2 |
|
|
К3 |
|
|
К |
2 |
|
|
|
|
120о |
|
|
|
|
|
|
|
|
|
Z1 |
|
Z1 |
|
30о
|
|
|
|
|
|
|
|
|
|
|
К1 |
|
К1 |
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
Mк1 |
|
1 |
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
||
|
|
|
3 |
|
|
|
|
|
|||
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
К2 |
|
|
|
|
|
|
|
|
|
|
|
2 |
MК3 |
|
|
3 |
2 |
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
ω |
1 |
|
|
|
|
|
|
|
К3 |
||
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
MQ |
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
К3 |
|
∑ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рисунок 2.29 – Уравновешивание двигателя 6 V 120° (ДЭМ II) |
|
||||||||||
|
|
|
|
|
|
M K1 |
M K3 |
K lo ; M K2 |
0; |
|
|
|
|
|
|
|
|
M Z1 |
M Z3 |
Z lo ; M Z2 |
0. |
|
|
находим величину и плоскость действия результирующих неуравновешенных продольных моментов:
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
||||
M |
K |
3K l |
o |
|
3 0.5C |
II |
l |
o |
3 |
0.5 |
|
m |
S |
R |
l |
; |
K |
30 ; |
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
o |
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 l |
|
|
|
|
|
|||
M |
Z |
3Z l |
o |
3 C |
II |
l |
o |
|
|
3 |
|
|
m |
S |
R |
; |
Z |
30 . |
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
o |
|
|
|
|
|
|||||||
МОДУЛЬ 3. ПРАКТИЧЕСКИЕ ЗАДАЧИ УРАВНОВЕШЕННОСТИ (ДВУХРЯДНЫЕ ДВИГАТЕЛИ) 77
Каждый из этих моментов уравновешивается противовесами на дополнительном валу.
Полное уравновешивание двигателя 6V120 приводит к значительному усложнению конст-
приводит к значительному усложнению конст-
рукции, поэтому на практике моменты второго порядка часто остаются неуравновешенными.
Компоновка 6V120 для двухтактного двигателя непригодна, т.к. неизбежны одновре-
для двухтактного двигателя непригодна, т.к. неизбежны одновре-
менные вспышки в цилиндрах левого и правого блоков вследствие равенства углов кр = бл.
2.3.5. Транспортный двигатель 6 V 90 |
|
|
|
|
|
|
|
|
|
|
|
|
|
Из анализа отсека 2V 90 известно, что |
F CI ; P 0; K |
Z |
2 |
; векторы К и |
||
2 |
||||||
|
|
|||||
|
|
|
|
|||
Z симметричны относительно оси Х. Следовательно, продольный момент от сил Р равен ну-
лю (Мр = 0), а векторные диаграммы сил Q, К и Z такие же, что и для двигателя 6V 120 .
Воспользовавшись результатами предыдущего анализа, находим неуравновешенные про-
дольные моменты:
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
||
M Q |
|
3 Q lo ; |
Q 30 ; M K |
|
|
3K lo ; M K |
3 |
CII lo ; |
|||||||||||
|
|
|
2 |
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
||
K |
30 ; M Z |
3 Z lo |
3 |
CII lo ; |
Z |
30 . |
|
|
|
||||||||||
2 |
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Результаты анализа одинаково применимы к четырехтактным и двухтактным двигате-
лям, разница при одной и той же схеме коленчатого вала только в порядке работы цилинд-
ров:
2-тактный
|
|
|
|
|
|
Л |
1 |
|
|
|
|
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
П |
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
3 |
|
|
|
|
|
|
2 |
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
90 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
30 |
|
|
|
|
|
|
|
|
|||
4-тактный |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
Л |
1 |
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|
|
|
|
|
||
П |
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|
|
90 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
В обоих двигателях выходной крутящий момент неравномерный.
2.3.6. Транспортный двигатель 6 V 180
В каждом из трех отсеков 2V 180 действуют силы, следовательно F = CII; P = –CI; K
действуют силы, следовательно F = CII; P = –CI; K
= 0; Z = 0, следовательно MK = 0; MZ = 0, т.е. двигатель 6V 180 самоуравновешен по мо-
самоуравновешен по мо-
78 2.3.6. Транспортный двигатель 6 V 180
ментам второго порядка. Результирующие неуравновешенные моменты MQ и MP на осно-
вании рассмотренных ранее случаев равны:
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
M Q |
|
3Q lo ; |
Q |
30 ; |
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
M P |
|
3P lo ; M P |
- 3 CI lo ; Q |
30 . |
|
|
||||||||||||
Порядок работы цилиндров: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
4-тактный |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
60 |
||||
|
Л |
1 |
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
3 |
|
|
|
|
П |
|
|
|
|
|
|
1 |
|
|
|
|
|
|
2 |
|
|
3 |
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2-тактный |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Л |
|
1 |
|
|
3 |
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
П |
|
2 |
|
|
1 |
|
|
|
3 |
|
|
|
|
|
|
|
||||
|
|
|
|
|
180 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Для уравновешивания продольного момента MQ используется коленчатый вал, а мо-
мента MP - дополнительный вал.
Обратная задача: самоуравновешенности двигателя 6 V 180
Задача формулируется следующим образом: определить условия и схему коленчатого вала, обеспечивающие полную динамическую самоуравновешенность двигателя 6V 180 , и
проверить его работоспособность по чередованию вспышек в цилиндрах обоих блоков. Под-
ход к решению задачи и основное направление поиска дают результаты предыдущего анали-
за уравновешенности двигателей 6V . Из всех рассмотренных примеров следует один оче-
. Из всех рассмотренных примеров следует один оче-
видный вывод: традиционная схема коленчатого вала, когда число кривошипов равно числу цилиндров в блоке и каждый кривошип связан с двумя цилиндрами левого и правого блоков,
не может обеспечить полной самоуравновешенности двигателя. Значит, нужен другой вал,
его и следует искать. Альтернативным решением может быть схема вала с числом кривоши-
пов, равным общему числу цилиндров двигателя. В рассматриваемом случае это шестико-
ленный вал, у которого каждая шатунная шейка соединена с одним цилиндром левого или правого блоков. Для уменьшения длины и повышения жесткости вала он выполняется на дисковых роликовых опорах малой ширины, но большого диаметра. Определившись прин-
ципиально со схемой вала, далее необходимо выбрать конкретную схему расположения кри-
вошипов, обеспечивающую, с одной стороны, полную динамическую самоуравновешен-
ность, и, с другой, удовлетворяющую требованиям равномерного чередования вспышек по
МОДУЛЬ 3. ПРАКТИЧЕСКИЕ ЗАДАЧИ УРАВНОВЕШЕННОСТИ (ДВУХРЯДНЫЕ ДВИГАТЕЛИ) 79
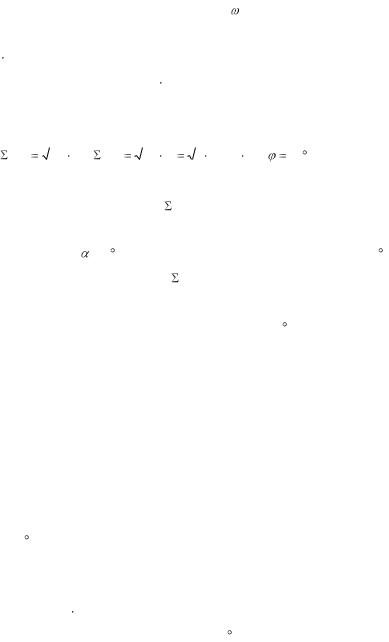
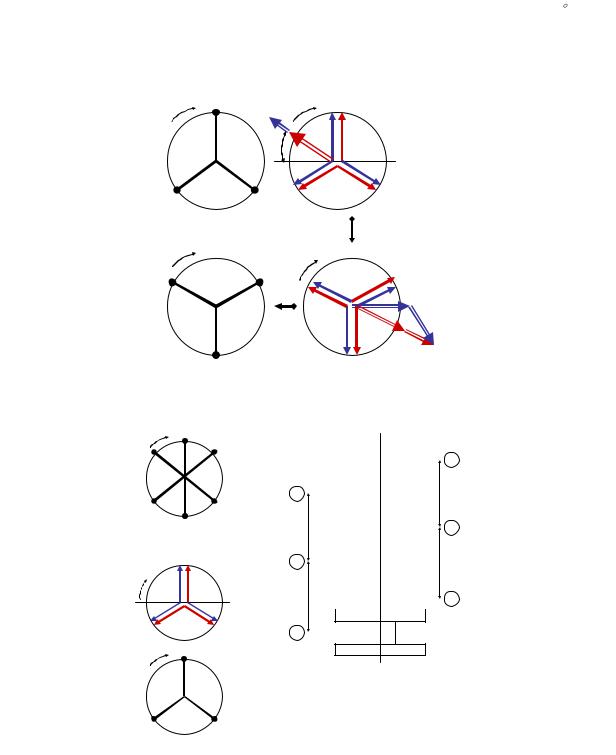
двигателю и оптимального нагружения подшипников коленчатого вала. Приняв принципи-
альную схему 6-коленного вала, у которого нечетные кривошипы соединены с цилиндрами
левого блока, а четные – с цилиндрами правого блока (рис.2.30), назначаем равномерную заклинку кривошипов левого одноблочного двигателя: 3..: 1 – 3 - 2 с КР =120 . Воспользо-
. Воспользо-
вавшись результатами анализа такого двигателя, строим совмещенную диаграмму сил PR и CI
с неуравновешенными продольными моментами M R |
и |
MCI |
согласно рис 2.30. |
|
Л |
|
Л |
Из диаграммы видно, что для уравновешивания этих моментов необходимо, чтобы со-
ответствующие векторы PR и CI правого двигателя развивали продольные моменты, равные по величине моментам левого двигателя, но противоположно направленные. Построив век-
торный |
треугольник моментов для правого |
двигателя из |
условия |
M RЛ |
и |
|
|
|
|
M RП |
|
M CIЛ |
M CIП , находим положение векторов PR |
и CI. Очевидно, |
что векторная диаграмма |
||
правого двигателя должна быть зеркальной по отношению к диаграмме левого двигателя.
Переходя от векторной диаграммы к схеме расположения кривошипов, получаем схе-
му заклинки кривошипов правого двигателя. Далее из двух схем |
валов левого и правого |
|
двигателей легко |
компонуется общая схема вала двухблочного двигателя 6V 180 , само- |
|
уравновешенного |
по всем силам, моментам от центробежных сил |
MR = 0 и от сил инерции |
первого порядка |
MCI = 0 и MI = 0. Переходим к анализу продольных моментов от сил вто- |
|
рого порядка. Из векторной диаграммы CII видно, |
что каждую пару сходственных векторов |
|
можно заменить одним удвоенным вектором |
CII 1 |
и т.д. Полученной векторной |
|
CII Л СII П |
|
диаграмме будет соответствовать условный трехколенный вал 1—3—2. Следовательно, дви-
гатель 6V180 можно рассматривать как сочетание трех отсеков 2V180 . Известно, что в ка-
можно рассматривать как сочетание трех отсеков 2V180 . Известно, что в ка-
ждом из отсеков силы K = 0; Z = 0, следовательно, и продольные моменты MK = 0, MZ =
0, т.е. MII = 0.
Проверяем работоспособность двигателя по чередованию вспышек в первых цилинд-
рах левого и правого блоков. Угол между первыми кривошипами 180 и бл = 180 , следова-
и бл = 180 , следова-
тельно, кривошип Iп придет в ВМТ своего цилиндра через 360 после вспышки в первом левом цилиндре. Пропуск вспышки невозможен, т.к. через следующий оборот заканчивается рабочий цикл и остальные цилиндры правого блока не успевают сработать за два оборота коленчатого вала. Приняв одинаковые порядки работы цилиндров по блокам, получаем рав-
после вспышки в первом левом цилиндре. Пропуск вспышки невозможен, т.к. через следующий оборот заканчивается рабочий цикл и остальные цилиндры правого блока не успевают сработать за два оборота коленчатого вала. Приняв одинаковые порядки работы цилиндров по блокам, получаем рав-
номерное чередование вспышек по двигателю через 120 .
Для двухтактного двигателя 6V180 рассмотренная схема вала непригодна, т.к. неиз-
рассмотренная схема вала непригодна, т.к. неиз-
бежны одновременные вспышки в двух цилиндрах левого и правого блоков.
80 |
Обратная задача: самоуравновешенности двигателя 6 V 180 |
|
ω |
лев ый дв игатель |
PR 1 CI1 |
|
|
|||||||||
|
|
1 |
|
|
ω |
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
300 |
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
PR 2 |
|
|
3 |
|
2 |
|
|
PR 3 |
CI3 |
|
CI2 |
|
|||||
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
||||
|
ω |
прав ый дв игатель |
|
|
|
|
|
|||||||
|
|
|
3 |
ω |
PR 2 |
|
|
CI3 |
|
|||||
|
|
|
|
|
|
|||||||||
2 |
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
PR 3 |
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
MR1 |
||
|
|
|
|
|
|
|
|
C |
|
|
|
|||
|
|
|
|
|
|
|
|
I2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
∑MCI |
MR3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
∑MR |
|
|
|
|
|
|
|
|
|
PR 1 |
|
|
CI1 |
|
||
|
|
1 |
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
ω |
|
|
1Л |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2П |
4 |
1 |
|
3П |
|
||||
|
|
|
6 |
|
|
|
||||
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
5 |
|
|
|
|
|
|
|
||
|
3Л |
8 |
3 |
|
2Л |
|
||||
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
8П |
|
|
|
|
|
|
|
СII 1л |
|
СII 1п |
|
||||
|
|
|
|
|
||||||
|
|
|
|
|
|
|
||||
|
2ω |
|
|
|
|
|
|
|
||
|
СII 2л |
|
|
|
СII 3л |
|
||||
|
|
|
|
|
|
|
|
|||
|
|
|
CII 2п |
|
|
|
CII 3п |
|
||
|
|
ω |
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
Л |
|
|
|
|
|
|
|
|
|
П |
3 |
|
|
2 |
|
|
|||||
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3п |
|
|
|
|
|
|
|
|
6 |
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
l0 |
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3л |
|
|
5 |
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2п |
|
l0 |
|
|
4 |
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
l0 |
2л |
|
|
|
|
|
|
|
|
|
3 |
|
|
|
|
|
l0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
1п |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
1л 1
1
Порядок работы цилин дров :
Л |
1 |
|
|
|
3 |
|
|
|
5 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
n |
|
|
6 |
|
|
|
2 |
|
|
|
4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рисунок 2.30 – Синтез самоуравновешенного 4-тактного двигателя 6V180°