

8. Технико-экономические показатели для оценки строительных машин
Технич-й ур-нь – показ-ль того, насколько изменились знач-я того или иного парам-ра по сравн-ю с теми же парам-ми изделия, принятого за эталон. Кач-во продукции – совок-ть св-в, обусловл-х ее пригод-ть удовлетворять опред-е потреб-ти в соот-и с ее назнач-м. показ-ли кач-ва бывают: -технич-е; -эк-е; - эксплуатац-е; -экологич-е; -эргономические. Наиболее важные технико-эк-е показатели: производ-ть, маневренность, проходимость, устойчивость, надежность, соц-я приспособленность. 1) Теоретическая, техническая и эксплуатационная производительность; Производит-ть машин измер-ся колич-м строительной продукции, вырабатываемой в ед-цу времени.
Различ-т 3 вида произ-ти строит-х машин: теоретич-ю, технич-ю, эксплуатац-ю Теор-я производ-ть опред-ся в условиях непрерыв-го режима работы при расчет-х скоростях рабочих движ-й и нагрузках: - для машин циклич-го действия: Пт=V*z, где z – число циклов; V – объекм продукции за 1 цикл работы машины.-для машин непрерывного действия: Пт=F*V*k, где F – площадь сечения материала;V – скорость движения материала; k – условия работы.
Технич-я производ-ть машины опред-ся максим-м кол-м продукции, получаемой в данных конкретных условиях при непрерыв-й работе. При ее опред-и учит-ся лишь миним-е перерывы. Эту харак-ку прим-т в основ-м для комплектования комплексов машин и для оценки максим-х их возможностей. Эксплуатац-я производ-ть машины опред-ся объемом продукции в час, смену, год, получаемым реально при правильной эксплуатации машины работниками средней квалификации. При этом учитыв-ся перерывы в работе. По эксплуатац-й производ-ти опред-т годовые нормы выработки на машину и опред-т плановые задания для строит-х организаций.
Птехн=Птеор*Кпер ; П3=Птехн*Кв(коэффициент использования по времени)
2. Определение стоимости машино- и экономического эффекта
Стоимость единицы продукции: m=c/Пэ, где с – себестоимость 1 маш/часа
Пэ – часовая эксплуатац-я производительность
 =стоимость
топлива, з/п, отчисления на накладные
расходы, капитальные затраты.
=стоимость
топлива, з/п, отчисления на накладные
расходы, капитальные затраты.
Удельная энергоемкость процесса
Nуд=N/Пэ – мощность, потребл эксплуатац произв-ю
Gуд=G/Пэ, где G – масса машины, Пэ – экслуатац-я производ-сть
3. Требования, предъявляемые к машинам
Удовлетворять условиям прочности, жесткости;Экономичность, технологичность;
Работоспособность; События, связанные с нарушением работоспособности, называются отказом.
Надёжность - свойство объекта выполнять свои функции во времени, сохраняя эксплуатационные качества. Надёжность определяется безопасностью работы. Наработка - сколько времени проработано без отказа. Ремонтопригодность; Долговечность - способность изделия работать до определённого износа.
4.Основные проблемы совершенствования машин
Основными являются следующие пути совершенствования техники: обеспечение высокой подвижности, проходимости и надёжности вне зависимости от условий работы; увеличение грузоподъёмности, грузовместимости, энерговооружённости машин и повышение их тягово-динамических характеристик; обеспечение технологичности и стандартизации конструкций машин, соответствующих требованиям крупносерийного производства, а также технического обслуживания и ремонта в армейских условиях.
9 ХОДОВОЕ ОБОРУДОВАНИЕ И СИСТЕМЫ УПРАВЛЕНИЯ СТРОИТЕЛЬНЫХ МАШИН
1.Назначение ХО
ХО предназначено для перемещения самоходных машин в процессах эксплуатации и выполнения технологических функций. ХО состоит из ходового устройства – движителей, механизма передвижения и опорных рам или осей.
2. Понятие движитель для самоходных машин
Движитель – это та часть самоходной машины, которая взаимодействует с грунтом или опорной поверхностью и осуществляет ее перемещение.
3.Основные параметры ХО
Маневренность – это способность мобильной машины перемещаться в пространстве с мин радиусами поворота
Рабочие скорости часто должны плавно регулироваться от мах значений до 0.
Давление на грунт у различного типа строительных машин меняется от 0,03-0,05 до 0,5-0,7 МПа.
Обеспечение машиной необходимых величин давления на грунт, тягового усилия и клиренса (расстояния от поверхности дороги до наиболее низкой точки ХО) хар-т ее проходимость, т.е. способность передвигаться в разнообразных условиях эксплуатации.
Основные технико-эксплуатационные показатели ХО:1 – скорость передвижения, проходимость – способность передвигаться в различных эксплуатационных условиях (рыхлым и переувлажненным грунтам).2 – маневренность – способность изменять направление движения в стесненных условиях.
Тяговые
усилия – 45-60% от массы машины. Обеспечение
машиной необходимых величин давления
на грунт, тягового усилия характеризует
ее проходимость. Проходимость определяется
глубиной колеи h
(м), которая увеличивается с ростом
давления р на контактную поверхность
между опорной частью ХО и грунтом. ,
гдеc
– коэффициент постели. с=0,1-0,5 МПа/м –
свеженасыпной песок, мокрая размягченная
глина;
,
гдеc
– коэффициент постели. с=0,1-0,5 МПа/м –
свеженасыпной песок, мокрая размягченная
глина;
с=20-100 МПа/м – мягкие скальные грунты, известняки, песчаники, мерзлота.
Маневренность характеризуется радиусом разворота R и шириной дорожного коридора Вд.к..
4. Виды ходового оборудования;
По типу движителя ХО подразделяют на:
1
– гусеничное;
2
– шинноколесное (пневмоколесное);
3
– рельсоколесное;
4
– специальное (шагающее, вездеходное
и др.). 
В
зависимости от выполнения опорных
роликов подвеска бывает жесткая
(положение оси опорных роликов
относительно рамы не меняется),
полужесткая, мягкая (ролики подпружинены,
могут подниматься)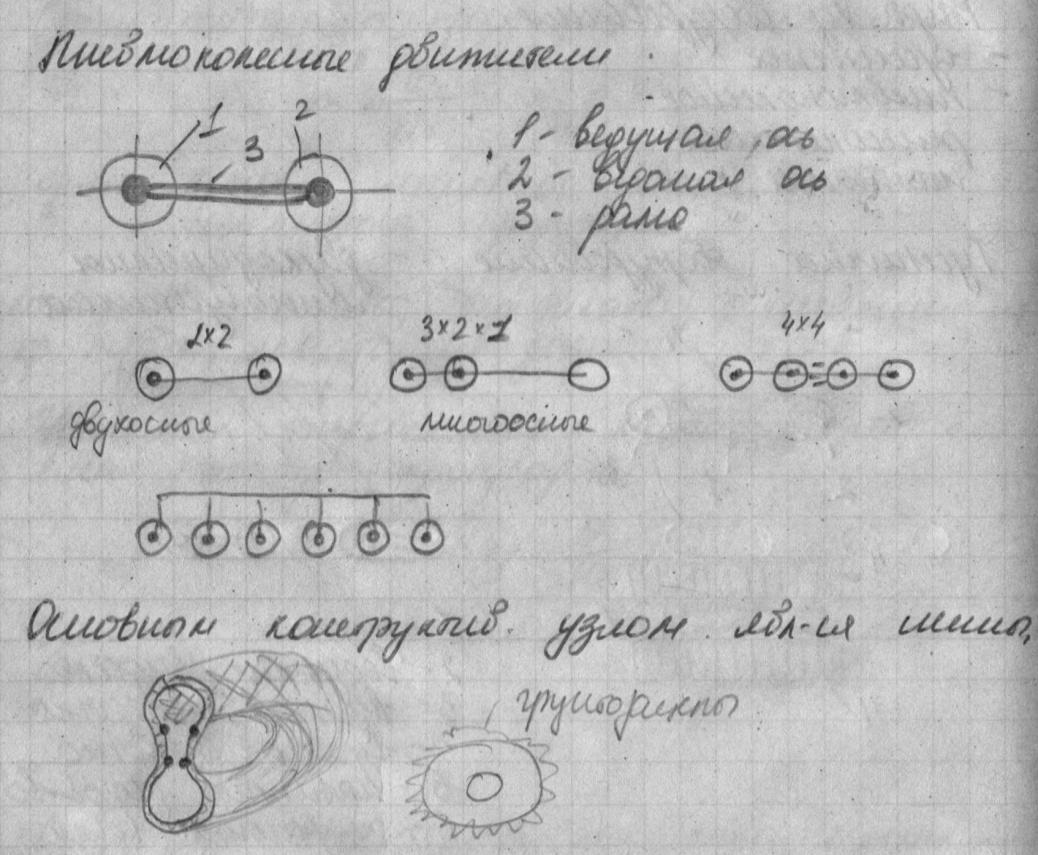
+ гусениц: малое удельное давление на грунт; высокая проходимость, маневренность;
- гусениц: малая скорость передвижения, потери на трение; высокая материалоемкость; высокая стоимость; износ, шум
1 – применяют для передвижения по бездорожью. Гусенич-й движитель различают с: жесткой, полумягкой, мягкой подвеской.
2 – для машин, где транспортная операция – главная (самоходные скреперы до 3 км), где часто меняются рабочие площадки, отстоящие одна от другой на значительных расстояниях. Гл-м опор-м элем-м явл-ся шина. Пневмошины бывают: низкого и высокого давл-я, арочные. Достоинства: повышенные транспортные скорости, большая мобильность, долговечность и ремонтопригодность по сравнению с гусеничным ХО, малые потери на трение, сравнит-но небольшая масса, низкий шум, постота обслужив-я, низкая стоим-ть. Недостатки: выс-е давл-е на грунт, низкая тяговая способ-ть.
3 – оборудуют машины, работающие в ограниченной зоне с идентичными транспортными траекториями (башенные краны, карьерные экскаваторы). Простота конструкции, невысокая стоимость, достаточная долговечность и надежность. Недостатки: малая маневренность, сложность перебазировки, дополнительные затраты на устройство и эксплуатацию рельсовых путей.
4 – имеет несколько конструктивных решений. Выпускают с механическим и гидравлическим приводом. Шагающий ход обеспечивает низкие удельные давления на грунт и высокую маневренность. Недостаток: малые скорости передвижения (до 0,5 км/ч). Для мощных экскаваторов драглайнов.
5. Основы тяговых расчетов; При тяговом расчете необход-о выяснить сопротив-е передвиж-ю машины и тяговые возмож-ти ее механизма по двигателю привода и по сцеплению движителей с грунтом. Сопротив-я передвиж-ю, кот-е должны быть преодолены мех-м приводом и колесным или гусенич-м движителем, W=Wр+Wпер+Wпов±Wу+Wи+Wв, где Wр-сопротив-е от рабочего органа машин, Wпер-сопротив-е пеедвиж-ю(перекатыв-ю) движителей, Wпов-сопротив-е повороту машины, Wу,Wи, Wв- сопротив-я уклона местности, инерции и ветра.
Сопротив-е от раб-го органа зависит от назнач-я и типа машины, хар-ра выполняемых работ, конструкции раб-го органа и др. факторов. Сопротив-я перемещ-ю движителей вследствие большого кол-ва факторов, влияющих на его знач-е: Wпер=fGм, где f- коэфф-т сопротив-я передвиж-ю движителей, Gм- сила тяжести машины. Сопротив-я повороту для гусенич-х машин опред-ся затратами эн-и на срезание и смятие грунта гусеницами и трением заторможенной гусеницы. При перемещ-и по рыхлому вязкому грунту можно принять Wпов =(0,4…0,7)Wпер.
Сопротив-е повороту колесных машин, передвигающихся по тв-м основаниям, обычно не учитыв-ся из-за малых знач-й. При езде по рыхлому грунту можно принять Wпов =(0,25…0,5)Wпер. Сопротив-е движ-ю машины от уклона мест-ти Wу =±Gsinα, где α-угол подъема машины. Сопротив-е от инерции при разгоне Wи=(m+l/r2)a, где m-масса машины, l-момент инерции приводимых в движ-е вращающихся масс механизма привода движителей, r-радиус приводного колеса, а-ускорение разгона машины. Сопротив-е от давл-я ветра Wв= Sqв, где S-суммарная подветренная площадь машины, qв-давление ветра.
6. Буксование; Буксование (также пробуксовка, от нем. Buchse — букса) — проскальзывание ведущих колёс (или гусениц) транспортных средств при попытке разгона (поступательное перемещение машины меньше, чем было бы при отсутствии проскальзывания).
Буксование оказывает значительное влияние на тяговую характеристику и тем самым на энергетический баланс, энергетический потенциал производительности и непосредственно на производительность агрегата.
7. Системы управления строительных машин (непосредственного действия и с усилителями); Сис-мы управл-я включ-т в себя пульт управл-я, сис-му передач, рычагов, тяг, золотников и дополнит-х устройств, контролир-х работу.
Системы управления строительных машин по конструктивным признакам разделяют на механические, гидравлические, пневматические, электрические и смешанные (комбинированные). По назнач-ю – на сис-мы управл-я тормозами, муфтами, двигателями, полож-м раб-го органа. По степени автоматиз-и: неавтоматизир-е, автоматич-е. Неавтоматизи-е сис-мы могут быть непосред-го действия или с усилителями(с сервоприводом).
В
1-ом случае оператор управл-т только за
счет своей мускульной эн-и, прикладываемой
к рычагам и педалям, во 2-ом- для воздействия
на объект управл-я использ-т дополнит-е
источники эн-и. Системы
управления непосредственного действия
с рычажно-механическим и гидравлическим
управлением тормозом.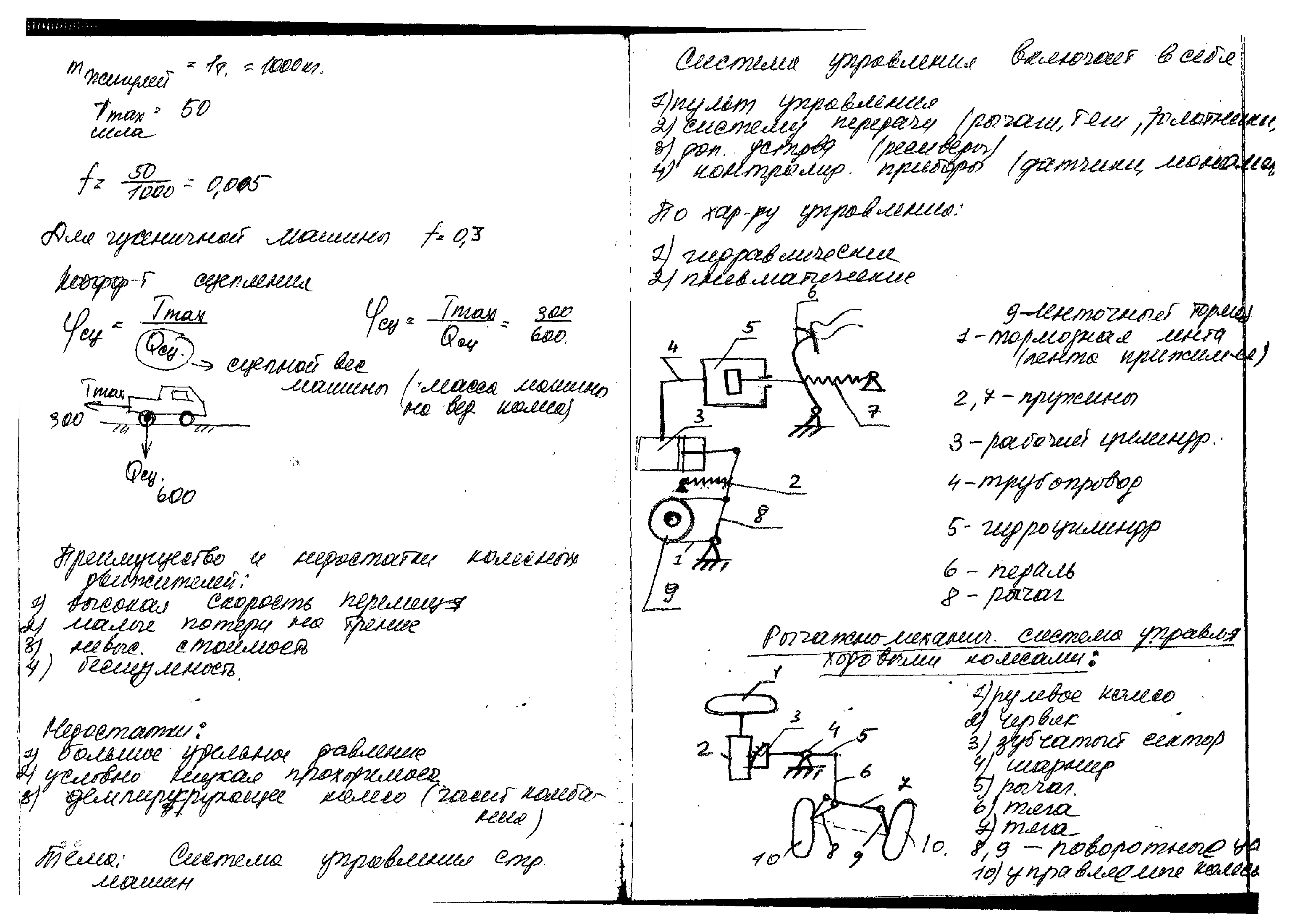
8. Автоматизация управления строительными машинами; Автоматизация строительных машин – это применение технических средств и систем управления, освобождающих человека-оператора от участия в процессах управления работой машины.
Управление любым техническим объектом (машиной, ее частью, комплектом машин, технологическим процессом) состоит из контроля ее фактического состояния и регулирования. В системе автоматического управления (САУ) все процессы выполняются без участия человека по специальным программам.
Автоматический контроль – автоматическое получение информации о состоянии объекта, характере протекания процессов, о наступлении предельных значений их.
Автоматическое регулирование - поддержание постоянства или изменение по требованию некоторой физической величины, характеризующей управляемый процесс (САР).
1.По характеру алгоритма управления (набору правил, по которым изменяется управляющее воздействие) различают системы управления:
1– по разомкнутому циклу (без обратной связи);
2– по замкнутому циклу (с обратной связью);
3 – комбинированные.
2.По назначению различают системы:1 – автоматической стабилизации;2 – программного управления;
3 – следящие;4 – самонастраивающиеся.
9. Микропроцессоры и их роль в автоматизации управления машинами. Микропроцессоры – одно из наиболее перспективных направлений совершенствования управления работой строймашин на ближайшее будущее. Микропроцессорная система моделирует реальный процесс функционирования машины и на основе прогноза ее состояния формирует набор машинных команд.
МП состоит из набора регистров памяти различного назначения, которые определенным образом связаны между собой и обрабатываются в соответствии с некоторой системой правил. Регистр – это устройство, предназначенное для хранения и обработки двоичного кода. К внутренним регистрам процессора относят: счетчик адреса команд, указатель стека, регистр состояний, регистры общего назначения.