

11 Грузоподъемные машины
1. Классификация грузоподъемных машин; Грузоподъем-е машины использ-т для перемещ-я строит-х мат-в, монтажа строит-х конструкций, погруз-но-разгруз-х операций на складах строит-х мат-в, монтажа и обслуж-я технолог-го оборуд-я. По хар-ру работы это машины циклич-го действия. Гл-й параметр- грузоподъем-ть- наиб-я допустим-я масса груза, включая массу съемного грузозахват-го приспособл-я, на подъем кот-й она рассчитана. Также харак-ся зоной обслужив-я, опред-й пролетом и вылетом груза, скоростями раб-х движ-й, массой, показателями потребл-й мощности и опор-ми нагр-ми. По назнач-ю грузоподъем-е машины делят на: вспомог-е(осущ-т вертик-е(домкраты, строит-е лебедки, тали) или гориз-е (тягальные лебедки) по рельсовым путям или направл-м перемещ-е грузов); строит-е подъемники(перемещ-т по вертикали грузы(грузовые) или людей(грузопассажирские) в кабинах или на площадках, движущихся в жестких направляющих), строит-е краны(наиболее слож-е и универс-е грузоподъем-е машины для перемещ-я штучных грузов, строит-х конст-й и технолог-го оборуд-я по пространст-й траектории различ-й протяженности и конфигурации), спец-е краны-трубоукладчики.
2. Основные характеристики грузоподъемных машин; Гл-й параметр- грузоподъем-ть- наиб-я допустим-я масса груза, включая массу съемного грузозахват-го приспособл-я, на подъем кот-й она рассчитана. Также харак-ся зоной обслужив-я, опред-й пролетом и вылетом груза, скоростями раб-х движ-й, массой, показателями потребл-й мощности и опор-ми нагр-ми. Вылет – расстояние от оси вращ-я поворот-й части крана до оси грузоподъем-го органа.
3. Домкраты; Домкраты относятся к простейшим типам грузоподъемных механизмов, обеспечивающие подъем и опускание груза. Они используются при монтажных и ремонтных работах. К ним относятся домкраты с реечным, винтовым и гидравлическим механизмами подъема. Они могут иметь ручной привод, а также электрический, гидравлический или пневматический.
(лаб№1)
Коэффициент
полезного действия η винтового домкрата
определяется по формуле:
 где ψ – угол подъема средней винтовой
резьбы; φ – приведенный угол трения
винта по гайке
где ψ – угол подъема средней винтовой
резьбы; φ – приведенный угол трения
винта по гайке

где t шаг резьбы, мм; d2 средней диаметр наружной резьбы (замеряется на натурном образце домкрата), мм.
Приведенный угол трения φ определяется из выражения:
φ = arctgƒ, где ƒ коэффициент трения материала винта по материалу гайки (винт – сталь, гайка – бронза), ƒ = 0,37 0,42.
Величину
веса груза Q, Н  ,
,
где p – усилие, прилагаемое рабочим, Н; R длина рукоятки (радиус), мм;
Q вес поднимаемого груза, Н; S величина перемещения груза за один оборот (шаг винта домкрата), мм; η КПД домкрата.
Определение передаточного числа и грузоподъемности гидравлического домкрата
 , где
D
диаметр поршня цилиндра, м;d
диаметр штока насоса, м;
, где
D
диаметр поршня цилиндра, м;d
диаметр штока насоса, м;
L и l плечи рычага, м.
Действительная подъемная сила Q, Н домкрата определяется из выражения:
 ,
где
усилие рабочего, приложенное к рукоятке
насоса (рычагу), Н;
,
где
усилие рабочего, приложенное к рукоятке
насоса (рычагу), Н;
u передаточное число домкрата;
η КПД домкрата.
4. Лебедки; Применяемые в строительстве лебедки могут быть ручными и приводными. Они применяются для подъема и подтягивания грузов, как самостоятельные машины и как агрегат более сложных строительных машин (подъемники, краны и т.д.). По способу соединения с приводом лебедки делятся на реверсивные и фрикционные. Для подъема грузов применяются только реверсивные лебедки, имеющие жесткую неразъемную связь барабана с двигателем через зубчатые колеса. Все электрореверсивные лебедки оборудуются двухколодочными, автоматически действующими, нормально замкнутыми тормозами. Главным параметром лебедок является тяговое усилие Q. Кроме того, лебедки характеризуются канатоемкостью барабана L скоростью каната V. В зависимости от назначения лебедки эти параметры имеют разное значение. Зависимость между моментом на барабане Мб и моментом, созданным на рукоятке Мр = Рl при КПД механизма и передаточном числе u, определяется уравнением: Мб = Мрu, где Мр момент, созданный на рукоятке, кНм, u передаточное число; КПД механизма. Приводные лебедки. По кинематической связи двигателя с барабаном приводные лебедки разделяются на электрореверсивные и фрикционные.Электрореверсивная лебедка В комбинации с полиспастами их используют для подъема различных по массе грузов при выполнении строительно-монтажных работ. Электрореверсивными лебедками комплектуются строительные подъемники, краны и другие машины.В фрикционных лебедках возможна работа нескольких барабанов от одного двигателя, включаемых поочередно с помощью фрикционных муфт

в фрикционная двухбарабаннная; 12 храповое устройство; 13 – тормоза; 14 фрикционные муфты
5. Тали, тельферы; Ручные тали подвешивают к потолочным балкам, треногам или другим устройствам с помощью крюка . Грузоподъемность ручных талей 0,5…5 т, высота подъема до 3 м. Тяговым органом в ручных талях является грузовая пластинчатая или овально-звеньевая цепь 1, охватывающая звездочку 3, жестко связанную с червячным колесом 4 червячного редуктора. Для увеличения КПД червячного зацепления применяют червячную двухзаходную передачу, не являющуюся самотормозящей, поэтому на валу червяка 7 устанавливают дисковый или конический грузоупорный тормоз 2. Вращение червяка осуществляется цепным колесом 6 с помощью цепи 8.
Грузоподъемность тали Q, т Q = 2PuR / (1000gr),где P усилие, прилагаемое к цепи, Н;
R – радиус цепного колеса; u передаточное число передачи; КПД передачи;
r радиус цепной звездочки.
Таль с электрическим приводом – электроталь. Такая таль представляет собой компактную подвесную электрическую лебедку, которая кроме механизма подъема груза 2 с крюковой подвеской имеет самостоятельный механизм передвижения 1 от отдельного электродвигателя.
Электротали
перемещаются по монорельсовым путям
прямолинейного или замкнутого контура.
Управление электроталями осуществляется
с помощью кнопочного пульта, подвешенного
на гибком кабеле.
б кинематическая схема механизма подъема; 1 механизм передвижения; 2 механизм подъема; 3 вал; 4 электромагнитный тормоз; 5 пружина; 6 электромагнит; 7 редуктор; 8 крюковая подвеска; 9 корпус; 10 барабан; 11 - электродвигатель
Рисунок 4.5 Электроталь
6. Строительные подъемники; Строительные подъемники различают:1.По назначению — грузовые, предназначенные только для транспортирования грузов, и грузопассажирские — для транспортирования грузов и людей;2.По способу установки — передвижные (самоходные и несамоходные), способные перемещаться относительно здания в процессе работы, и стационарные, которые могут быть приставными, прикрепляемыми к зданию, и свободностоящими — без крепления к зданию. Передвижные подъемники на рельсовом или пневмоколесном ходу используют сравнительно редко.3.По конструкции направляющих грузонесущего органа — с подвесными (гибкими) и жесткими направляющими.
4.По способу монтажа: мобильные (с объекта на объект в собранном виде) и не мобильные (разбираемые при демонтаже на секции и перевозимые в таком виде к месту монтажа).
5.По конструкции: мачтовые, шахтовые, скиповые, вышки;
Область применения: Строительные подъемники предназначены для подъема (опускания) в грузонесущих органах строительных грузов и людей на этажи и крыши зданий и сооружений при выполнении строительно-монтажных, отделочных и ремонтных работ. Грузонесущие органы строительных подъемников (клеть, кабина, платформа, ковш, крюк, бункер, бадья, захваты и т. д.) движутся, как правило, по вертикальным жестким направляющим.
Стр-ные
краны – наиболее сложные и универсальные
машины для перемещения грузов по
пространственным траекториям различной
протяженности и ориентации. Они разл-ся
по конструкции и выпускаются в виде
консольных (стреловых) – стационарные
мачтовые, мачтово-стреловые, башенные
краны, стреловые самоходные и специальные
краны (трубоукладчики) или пролетных
конструкций – краны мостовые, козловые,
кабельные, бывают 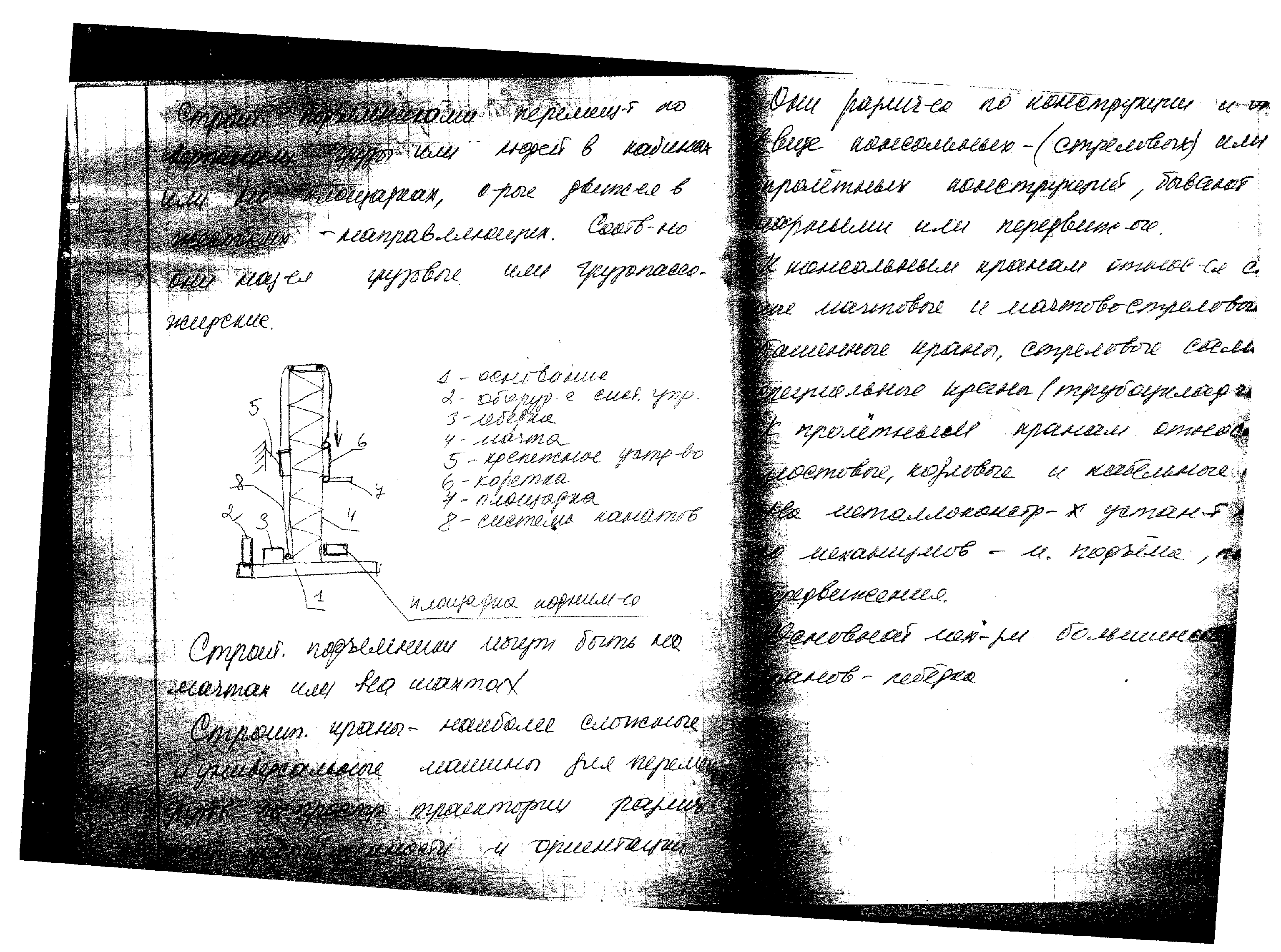
стационарными и передвижными
7)
Монтажные вышки и гидроподъемники;
Бесканатные
подъемники в виде одностоечной или
двухстоечной мачты. К ее направляющим
прикреплены зубчатые рейки с зубчатыми
колесами, на грузовой платформе
подъемного механизма. Для подъема и
подачи в окна грузов, персонала в
башенные краны.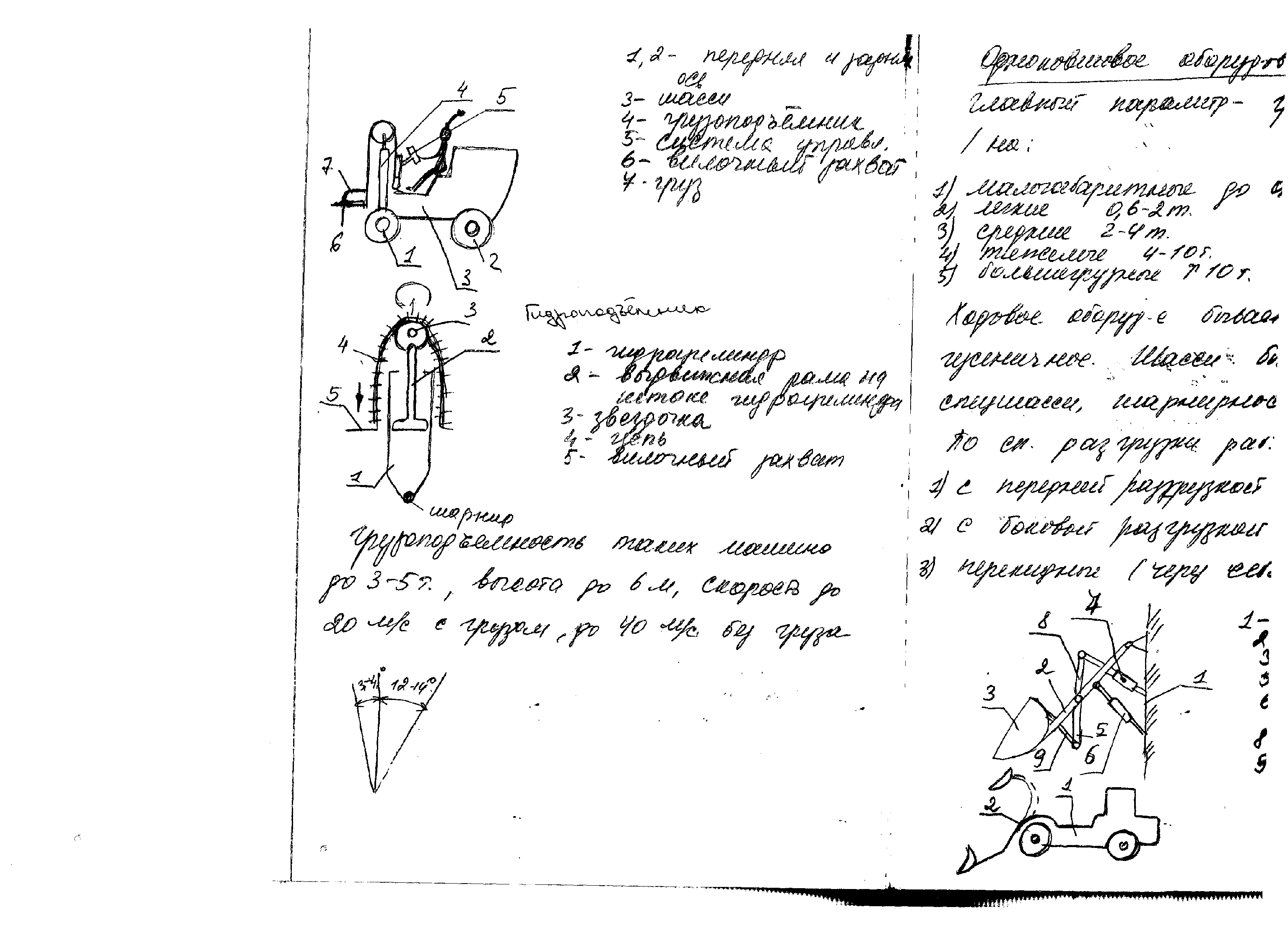
Ковшовые (скиповые) подъемники для подачи сыпучих материалов в бункера, работы на складах и предприятиях промышленности стройматериалов. Ковш оборудован ходовыми колесами (рамками), перемещается лебедкой по наклонно-вертикальным рельсам. Ковш, доходя до упора, опрокидывается. Емкость – 1 куб.м. скорость перемещения 0,1-0,5 м/с.
Вышки для подъема грузов и людей при обслуживании ЛЭП, осветительных сетей, контактных линий общественного транспорта, монтажных и ремонтных работах. Состоит из базового автомобиля, телескопной мачты, люльки, механизма подъема мачты и ее раздвижки. Мачта состоит из нескольких трубчатых секций. Раздвигается канатно-блочной системой лебедкой, гидравлически и комбинированно. Автомобиль устанавливают на выдвижные опоры в его задней части перед началом работы. Сейчас больше вышки с гидроприводом и телескопическими мачтами и стрелами. Основные параметры:
грузоподъемность;
рабочая высота;
продолжительность подъема люльки.
8) Строительные краны; Башенные строительные краны предназначены для механизации подъемно-транспортных работ при возведении жилых, гражданских и промышленных зданий. Они используются также в качестве кранов-погрузчиков при работе на складах, в качестве кранов для нулевого цикла и других работ. Базовые модели башенных кранов обозначаются буквами КБ (кран башенный) и цифрами. Первая цифра указывает размерную группу по грузовому моменту, две вторые – порядковый номер базовой модели, имеющий поворотную или неповоротную башню, четвертая – номер исполнения, отличающийся от базовой модели, например длиной стрелы, высотой подъема, величиной максимальной грузоподъемности. После цифр может указываться обозначение очередной модернизации (А, Б, В) и климатическое исполнение для холодного, тропического и тропического влажного климата (ХЛ, Т, ТВ). По способу установки на строительной площадке башенные краны бывают передвижные, стационарные и самоподъемные.
Стационарными называются краны, устанавливаемые на фундаменте и обслуживающие площадку с одной стороны. Но большой высоте подъема такие краны дополнительно крепят к возводимому сооружению, в этом случае они называется приставными.
Самоподъемными
называются краны, устанавливаемые на
конструкциях возводимого сооружений
и
перемещаемые
вверх с помощью собственных механизмов
по мере возведения этого
сооружения.Передвижными называются
краны, оборудованные ходовым устройством,
которые могут перемещаться по строительной
площадке в рабочем положении.
По
типу ходового устройства башенные
краны
разделяются на рельсовые, автомобильные,
пневмоколесные, гусеничные и шагающие.
По
типу применяемых башен различаются
краны с поворотной и неповоротной
башней. По
типу стрелы краны
разделяют на две основные группы: с
подъемной и с
балочной
стрелой 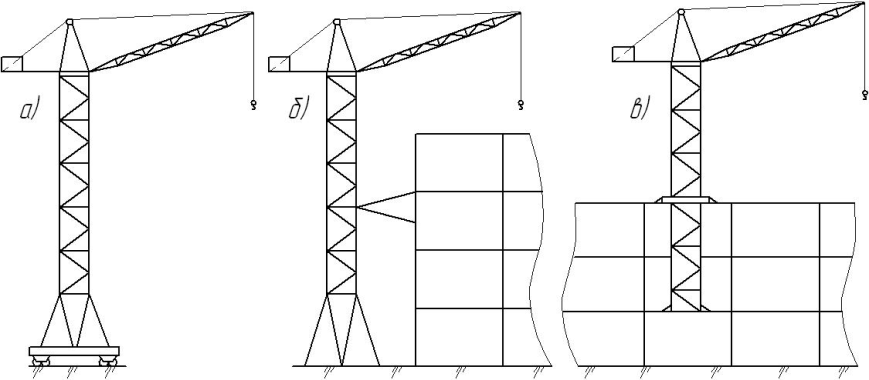
а передвижной; б стационарный (приставной); в самоподъемный
Типы кранов по способу установки
9) Стреловые самоходные краны классифицируют по типу ходового оборудования и привода, по исполнению и виду стрелового оборудования. По типу ходового оборудования их разделяют на краны автомобильные, пневмоколесные, на спецшасси автомобильного типа, гусеничные, на короткобазовом шасси, на тракторах и прицепные. По типу привода краны бывают с одно- и многомоторным приводом. Чаще применяют многомоторный привод – электрический, гидравлический или комбинированный. По исполнению и виду стрелового оборудования стреловые самоходные краны выпускаются с неподвижными (постоянной длины) и телескопическими стрелами. Длина выдвижных стрел изменяется без нагрузки, телескопических – с нагрузкой на крюке.
Кранам, выпускаемым заводами Минстройдормаша, присваивается индекс, состоящий из двух букв – КС (кран стреловой) и четырех цифр. Цифры означают: первая – размерную группу, вторая – тип ходового оборудования, третья – исполнение стрелового оборудования, четвертая – порядковый номер модели. После цифр в индексе могут указываться очередная модернизация (А, Б, В) и климатическое исполнение (ХЛ, Т, ТВ) – (рисунок 7.9). Так, индекс КС-8362ХЛ означает: кран стреловой грузоподъемностью 100 т, пневмоколесный с гибкой подвеской, второй – модели в северном исполнении.
Автомобильные краны.
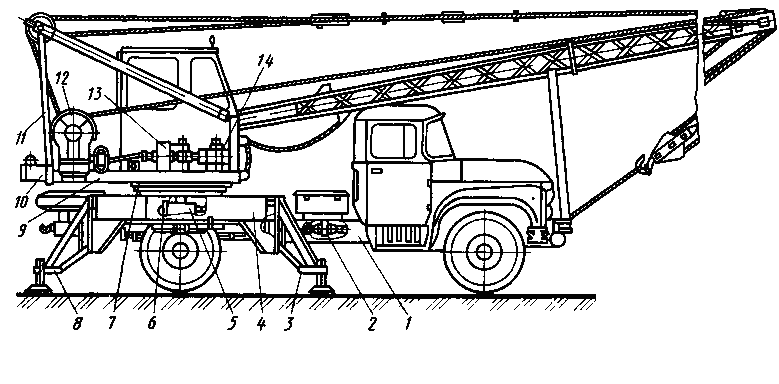
1 – шасси; 2 – коробка отбора мощности; 3, 8 – выносные опоры; 4 – рама;
5 – промежуточный редуктор; 6 – стабилизирующее устройство; 7 – опорно-поворотное устройство; 9 – поворотная платформа; 10 – противовес; 11 – двуногая стойка;
12 – стреловая лебедка; 13 – реверсивно-распределительный механизм; 14 – механизм вращения; 15 – грузовая лебедка
10. Анализ достижений в области простых грузоподъемных машин и подъемников
Достижение
– наличие автоматизации, что позволяет
уменьшить долю ручного труда.Основным
направлением автоматизации этих машин
является управление, безопасность,
контроль и диагностика. Однако в связи
со спецификой использования значительную
роль в работе грузоподъемных машин
играет их безопасность.Внастоящее
время имеется большое количество
ограничителей нагрузки кранов по
конструктивны решениям и их видам.
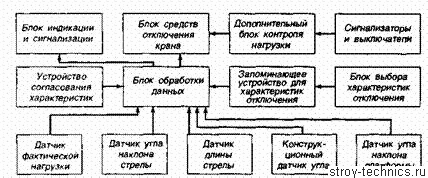
Структурная схема ограничителей нагрузки крана . Все эти ограничители позволяют использовать оборудование с меньшим риском рабочего при производстве.